 高精度地图的路,还能走多远?
高精度地图的路,还能走多远?
3月23日,华为在2023春季旗舰新品发布会上,华为终端BG CEO余承东透露,华为即将上车搭载的高阶自动驾驶系统ADS 2.0版本,将不依赖于高精度地图,而是主要通过车端融合感知来进行环境识别。
就在之前,理想汽车首席执行官李想也发出了一封全员信,信中表示,理想汽车的端到端训练城市NOA导航辅助驾驶(不依赖HDMAP,即不依赖高精地图)将会在2023年底开始落地。而小鹏汽车董事长兼首席执行官何小鹏在小鹏汽车全员会上也明确提出,2023年的X-NGP辅助驾驶要抛掉高精地图。
高精度地图,曾被众多汽车工程师认为是汽车的“上帝视角”和“千里眼”,也曾被很多人称作是自动驾驶技术的重要“拐杖”,而随着自动驾驶技术的发展,越来越多汽车主机厂正在着力于扔掉这跟“拐杖”,希望让自动驾驶走向“重感知”的道路上来,高精度地图正在从自动驾驶必需品,逐渐走向边缘化。
什么是高精度地图?
不同于普通的电子导航地图,高精度地图拥有更高精度(可以达到厘米级)、更多数据维度、定位也更加精准。垂直方向的信息也可以在高精度地图上精准显示,如道路的弯度、坡度等信息,此外,像是车道线位置、类型、宽度;交通信号灯、路边地标及障碍物等元素,都可以在高精度地图上详细标注,可以实现车道级规划,这些信息将让自动驾驶汽车获得更多的交通数据信息,让行驶更加安全。
欢迎关注「智驾最前沿」微信视频号
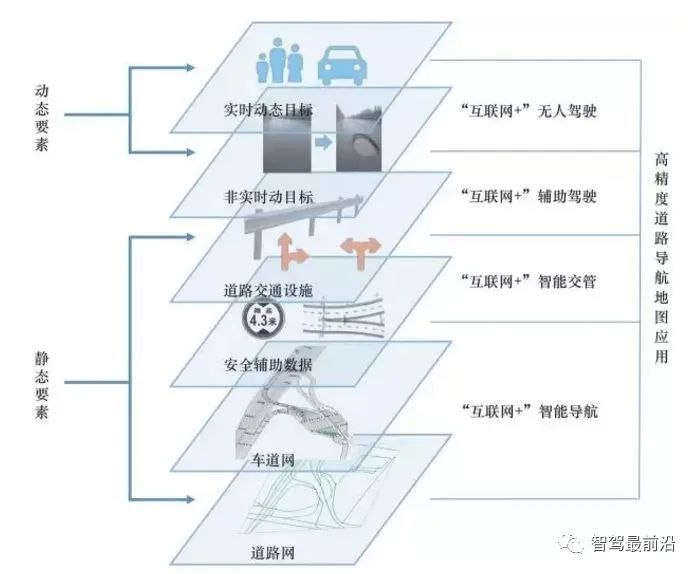
由于高精度地图需要存储和呈现车辆环境数据和交通运行数据,这些数据有动态的,也有静态的,只是通过一张图层难以实现这个效果,因此,需要将高精度地图进行分层,每一层体现一种环境要素或者交通要素。
欧洲将高精度地图图层分成来静态、准静态、准动态和动态4层,中国则提出了将高精度地图分为道路层、交通信息层,道路-车道连接层、车道层、地图特征层、动态感知层、决策支持层7层的分类方法。但根据识别信息的运动形式和种类,可以大致分为动态要素和静态要素。动态要素包含实时动态目标和非实时动态目标,而静态要素包含道路交通设施、安全辅助数据、车道网及道路网等信息。
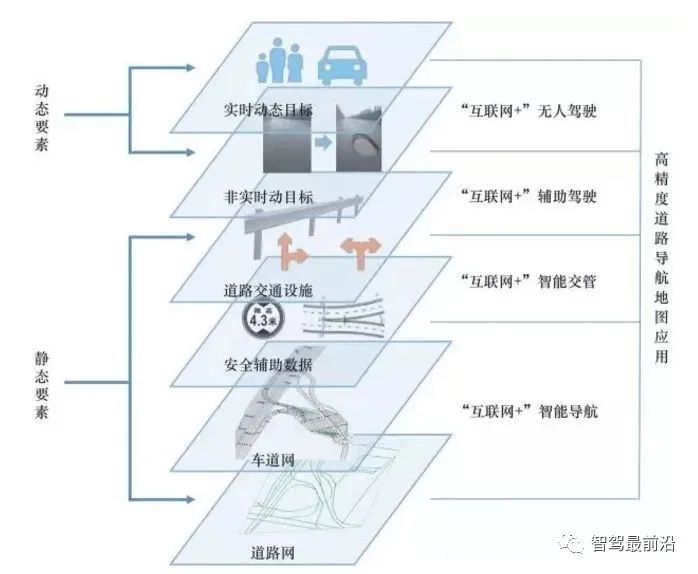
高精度地图分层
高精度地图的建立需要收集和处理大量的数据,以生成地图数据,主要包括地图数据采集、地图数据处理和地图数据应用三个部分。
地图数据采集
地图数据采集是高精度地图技术的第一步。通常采用的方法包括激光雷达、车载摄像头和高精度定位等多种传感器的融合,将环境中的数据收集下来。在数据采集的过程中,需要保证数据的精度、全面性和实时性。因此,在采集数据时,需要考虑车辆的位置、传感器的精度、环境因素以及数据质量等多个因素。采集到的数据通常包括车道线、路口、交通标志、交通信号灯、障碍物等环境信息。
地图数据处理
地图数据处理是将采集到的数据进行加工处理,并生成高精度地图的过程。数据处理的过程中,需要进行数据清洗、特征提取、地图构建和数据更新等多个步骤。其中,数据清洗是指去除噪声和无效数据,以确保数据的准确性和一致性;特征提取是指从原始数据中提取特征信息,例如车道线、路口和交通标志等;地图构建是将提取到的特征信息转换为地图数据,包括路网、车道线、交通标志和障碍物等;数据更新是指将新采集到的数据加入到地图中,以保证地图数据的实时性和全面性。生成的地图数据还需要进行储存,以供后续使用,常用的储存方法包括云存储和分布式存储等,随着时间的推移,高精度地图的数据还需进行更新,以确保高精度地图数据的准确性和实用性。
地图数据应用
地图数据应用是将高精度地图应用于辅助自动驾驶汽车行驶的过程。在自动驾驶汽车行驶过程中,高精度地图可以提供精确的位置和路线信息,帮助车辆进行导航和行驶决策。同时,地图中的环境信息还可以帮助自动驾驶汽车识别和避让障碍物、识别交通标志和信号灯等。
为什么要摆脱高精度地图?
随着越来越多智能汽车企业尝试走向“重感知”的方向,高精度地图在行业的认可度正面临着走向边缘化的阶段。为什么要尝试摆脱高精度地图?
1、数据采集和更新成本高:高精度地图需要大量的数据采集和更新工作。这包括使用激光雷达、相机等传感器对道路、交通标志、道路标线等进行精确的扫描和记录。这些传感器产生的数据需要经过处理和验证,以生成准确的高精度地图。然而,采集和处理这些数据的过程非常耗时且昂贵。此外,为了保持高精度地图的最新性,还需要定期进行更新,这意味着持续的数据采集和处理成本。
2、维护和更新复杂:道路网络的动态性使得高精度地图的维护和更新变得复杂。道路建设、交通标志更改、交通状况的变化等都会对地图数据产生影响。因此,高精度地图需要及时的更新和维护,以确保其准确性和可靠性。这需要建立一个有效的反馈机制,收集来自驾驶者、城市规划部门和其他数据源的信息,以及专业团队对数据的验证和更新。
3、隐私和安全问题:高精度地图涉及大量的位置数据和道路信息。保护用户的隐私和地图数据的安全是一个重要的考虑因素。地图供应商和相关利益方需要确保数据的安全存储、传输和处理,并制定合规性政策和措施,以保护用户隐私和防止地图数据的滥用。
4、地理覆盖范围有限:构建高精度地图需要大量的人力和物力资源。因此,在初期阶段,高精度地图主要覆盖城市和主要道路网络,而较偏远地区和农村地区的地图数据可能相对不完整。这是由于数据采集困难、覆盖范围较小以及资金和资源限制等因素导致的。这限制了自动驾驶车辆在广泛地理区域内的应用和普及。
5、标准和协议缺乏统一:自动驾驶车辆所需的高精度地图需要与车辆的传感器和控制系统进行有效的集成。然而,由于缺乏统一的标准和协议,不同高精度地图供应商和车辆制造商之间的互操作性存在困难。这使得地图数据的交换和使用变得复杂,导致了更高的成本和技术难度。缺乏统一的标准和协议会阻碍地图数据的无缝集成和共享,限制了自动驾驶车辆的普及。
可以不需要高精度地图吗?
虽然越来越多智能汽车企业尝试弱化高精度地图在自动驾驶汽车中的参与度,但现实却与想法完全相反,现阶段想要让自动驾驶汽车实现L3级别,没有高精度地图的参与是完全实现不了的。
在“重感知”的理念中,自动驾驶汽车应当可以和人类驾驶员一样,能自动识别交通环境信息,且可以对多变的交通环境做出快速反应,但现阶段的技术,却无法实现这些要求,由于感知硬件和自动驾驶软件并不完善,在多数交通环境下,还是无法成为老司机,因此在自动驾驶未来很长时间的发展中,依旧无法完全摆脱高精度地图。
审核编辑 :李倩
-
高精度
+关注
关注
1文章
525浏览量
25449 -
数据采集
+关注
关注
38文章
6052浏览量
113617 -
自动驾驶
+关注
关注
784文章
13784浏览量
166368
原文标题:高精度地图的路,还能走多远?
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是高精度地图?如何应用?
从三个方面展开谈论高精度地图
分析高精度道路导航地图的发展现状
除了测绘,未来哪些行业对高精度有需求?
四维高精度地图获得进展
自动驾驶基础之高精度地图和定位惯性测量单元IMU的详细介绍
Uber如何提高地图精度
高精度地图在自动驾驶中的应用优势是什么
高精度地图在无人驾驶领域的作用及现状解析
三星在智能手机行业的霸主之路还能走多远
高精度地图的路,还能走多远?
「微侃」未来的智能驾驶,还需要高精度地图吗?






 工商网监
工商网监
评论