 使用数字电位器进行音频增益控制
使用数字电位器进行音频增益控制
数字电位计(电位器)为音频音量(增益)控制应用提供了优势,可以取代笨重的机械电位器,特别是在MP3播放器、PDA、手机、移动互联网设备或立体声AM/FM收音机等手持便携式设备中。本文档介绍可用于音频控制的数字电位器类型,例如对数锥度电位器(对数电位器)。本文介绍了几种使用对数锥形电位器和音频放大器的常见设计,评估了它们的优缺点,并推荐了电路设计。
介绍
便携式多媒体设备现在通常包括某种立体声音频播放电路,可能用于MP3或移动互联网应用。许多专用IC可用于这些电路,许多使用机械电位计(电位器)。本应用笔记将证明广泛使用的低功耗元件也可以同样有效。本文演示了如何在没有机械电位器的情况下实现立体声音量控制。
传统机械锅设计
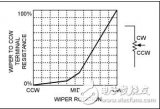
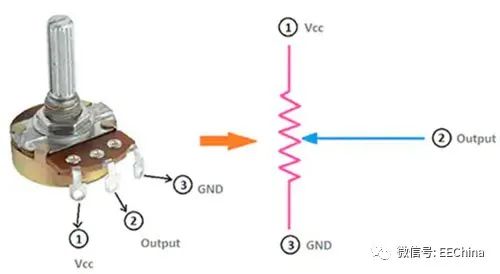
过去,音频音量控制使用一种特殊的电位计,带有对数(有时是音频)锥度或定律(图 1)。这种方法源于耳朵对声压级变化的大致对数响应。
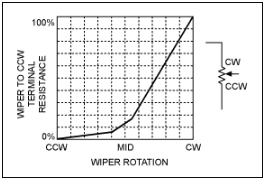
这种方法源于耳朵对声压级变化的大致对数响应。
通常,旋转的中点通常会使音频信号衰减约20dB,衰减从逆时针(CCW)的中点迅速增加。从中点顺时针方向 (CW) 可以更好地控制“更大声”设置。
虽然这种方法在实践中效果很好,但仍有几个原因不在小型便携式设备中使用机械电位器。机械电位器的空间限制和可靠性问题只是两个直接问题。如今,现代设备的通用音量控制界面将向上/向下按钮与某种形式的主机处理器结合使用。这种设计提供了一种廉价、可用的解决方案,无需笨重的机械电位器。
立体声(或联动)旋转电位器也存在机械跟踪问题;机械公差意味着L-R跟踪会随着音量的调整而受到影响。此外,还应考虑所需的传递函数。是否需要完全衰减?或者更确切地说,应用是否可以使用增益微调控制,提供30dB的调节范围,但没有完全关闭的位置?也许你应该考虑一个数字锅?
数字电位器的设计问题
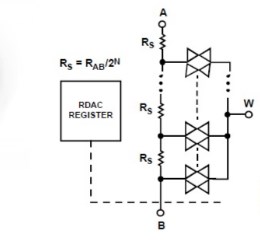
在过去几年中,数字电位器已经面世,其性能也发生了变化(图2)。这些数字器件在数字控制下使用电阻梯和FET开关,在许多领域有效地取代了机械电位器。从表面上看,使用一对这样的IC似乎是立体声音量控制的合理解决方案,但是,必须首先解决一些问题。
图2.MAX5160数字电位器功能框图数字锅。
最常用的数字电位器实际上是线性电位器,即它们的电阻增量权重相等。在音频音量控制中,需要合理恒定的每步dB定律,因此设计可能必须以某种方式vwin 此对数行为。现在回想一下,我们不再受到机械电位器的音频锥度的限制。
有一个后续问题。虽然数字电位器阶跃通常设计为提供等值电阻增量,但工艺变化的副产品是总端到端电阻因器件而异,在某些类型中高达±30%。在设计需要使用单独的数字电位器在两个通道之间进行紧密匹配的电路时,必须考虑这种电阻变化。
最后,过渡应尽可能无毛刺,因此应强制采用先成后断的雨刮器布置。
设计示例
下面是一些设计示例。有增益调整设计(控制在设定的衰减范围内应用,但不提供完全衰减),以及更传统的全CW/关闭CCW音量控制。这些电路概念假设V。抄送介于 2.7V 至 5V 和低阻抗 V 之间裁判= V抄送/2.IN输入信号来自低阻抗电压源。
例 1
图3中的电路似乎给出了足够的结果。在MAX5160运算放大器周围使用两个MAX4252L(假设其数字输入得到适当控制),电路应在标称±6dB范围内提供均匀跟踪增益或衰减。电路应在 V 电压下工作抄送范围为 2.7V 至 5V,具有 32 种可用增益设置。即使是MAX5160L的上电复位(POR)状态,也能提供近似单位增益设置。
这种实现方案的缺点是数字电位器的总电阻变化±25%。这种变化可能导致较宽的增益容差,特别是在电阻末端、通道间以及单元间设置上。例如,假设50kΩ电阻为±1%,则标称最大值+6dB设置可能在以下限值之间变化:
Av1 = -(50.5kΩ + 62.5kΩ)/49.5kΩ = -2.283V/V 或 7.16dB
Av2 = -(49.5kΩ + 37.5kΩ)/50.5kΩ = -1.723V/V 或 4.73dB

图3.±6dB立体声增益微调控制,32种增益设置(显示1个通道)。
这种左右不匹配的数量很容易听到。通过选择或调整支撑电阻(或选择数字电位器!)以适应,可以使该电路更好地工作,但这在批量生产中是不可行的。必须找到一种设计方法,以最小化或消除这种增益误差。
例 2
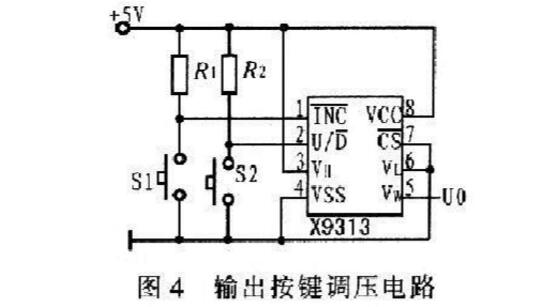
图4中的电路在分压链中使用MAX5160L数字电位器。MAX5160L使用100kΩ和50kΩ电阻为MAX4252提供除通常的负反馈外的一些正反馈。该电路的增益可以表示为:
AV = (1 - KN)/(KP- KN)
其中 KN是负反馈分数和 KP是正反馈分数。对于图 4 中的示例,KN= 100kΩ/(100kΩ + 50kΩ) 或 2/3,和 KP是可变的。
图4.±6dB立体声增益微调控制,改进设计中的17种增益设置。
当MAX5160L游标位于V时裁判端子时,电路的增益为-0.5V/V,因为没有正反馈贡献。当雨刮器处于中间电平时,KP= 0.5,增益现在为-2V/V。 因此,通过使用V之间的这17个位置裁判和中间量程,增益可以在±6dB范围内变化。15个未使用的位置是重复性的权衡,因为增益值不依赖于数字电位器电阻容差,图1所示电路也是如此。增益容差现在仅受MAX1L的±100%50kΩ/5160kΩ电阻和INL/DNL误差(最大值±4.6%)的限制。
有一个有趣的点需要注意。当KP≥2/3,即当正反馈分数达到或超过负反馈分数时。因此,控制MAX5160L的主机处理器应防止这种情况发生。
例 3
图5中的电路使用数字电位器作为传统音量控制方法的明显替代方案。所有代码均有效,设置范围从0dB到完全衰减。表1给出了基于MAX5160L的32级阶跃计算的衰减。
| 代码设置 | 衰减 | 代码设置 | 衰减 |
| 0 | 0.00 | 16 | -6.31 |
| 1 | -0.28 | 17 | -6.90 |
| 2 | -0.58 | 18 | -7.55 |
| 3 | -0.88 | 19 | -8.24 |
| 4 | -1.20 | 20 | -9.00 |
| 5 | -1.53 | 21 | -9.83 |
| 6 | -1.87 | 22 | -10.74 |
| 7 | -2.22 | 23 | -11.77 |
| 8 | -2.59 | 24 | -12.93 |
| 9 | -2.98 | 25 | -14.26 |
| 10 | -3.38 | 26 | -15.85 |
| 11 | -3.81 | 27 | -17.79 |
| 12 | -4.25 | 28 | -20.28 |
| 13 | -4.72 | 29 | -23.81 |
| 14 | -5.22 | 30 | -29.83 |
| 15 | -5.74 | 31 | 全衰减 |
图5.传统的音量控制设计(显示 1 个通道)有缺点。
请注意衰减数字是如何分布的。前 6 个代码的总变化小于 15dB,前 1 个代码的总变化小于 6dB。这不是特别有用。有趣的是,即使选择抽头次数多得多的器件,您仍然只能获得超过一半代码的<>dB变化。
为了解决这个问题,一种方法是选择可用的代码子集,以实现合理的恒定dB/步进数字。例如,仅使用表1中突出显示的代码,则代码3的步进约为29dB,允许11个设置。如果选择的数字电位器具有许多抽头位置(256 或更高),则可以很好地工作。但是,具有这种灵活性的零件通常更昂贵。鉴于大多数抽头位置不会被使用(除非在音量设置之间进行插值时),尝试使用更多具有不同拓扑的现有抽头似乎更有效。
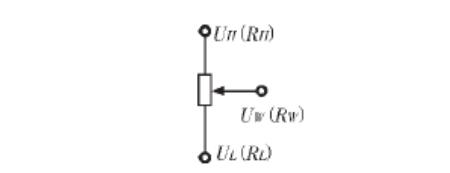
电阻加载线性电位器的刮水器以“弯曲”特性是一个古老的技巧。负载电阻通常约为线性电位电阻值的1/20。将这种方法与线性数字电位器结合使用有两个缺点:电位器的输入阻抗现在取决于增益设置(最大音量时最低);同样,对端到端电阻的广泛公差意味着L-R跟踪在极端之外的任何设置中都会受到影响。图 6 显示了这个想法。
图6.这种具有阻性负载的配置会产生一个等效的固定电阻,以便清晰起见。
例 4
图7的电路产生了传统的音量控制特性,与图5非常相似。然而,这种设计使用一点正反馈,在其大部分可用范围内将步长均匀到大约1.6dB/步。
这种设计的直接缺点是负反馈分数(KN) 必须为 0.5 或更高才能使此方法产生可用结果(尽管 0.25 是稳定性的极限)。简单来说,我们已经扔掉了大约一半的可用代码,以便电路可以运行。但是,其余 17 个代码全部使用(没有间隙,如图 6 示例所示),如下表 2 所示。第三列以步长列出增量,显示它们在大部分衰减范围内的一致性。图8显示了线性化效应,Y轴上的增益(以dB为单位)与X轴上的抽头数作图。该数据与图6电路相比具有优势,图3中的突出显示值给出了大约11dB的步长,只有<>个设置。
图7.这种近乎恒定的dB/步进拓扑(显示1个通道)是一种改进的设计。
这种拓扑结构与所示值的一个副作用是,数字电位器的中间电平值将有6dB的提升。这通常可以适应整个音频路径的增益结构,其中一些增益偏移通常是不可避免的。
| 代码设置 | 获得 | (三角洲) | 代码设置 | 获得 | (三角洲) |
| 16 | 6.88 | 24 | -5.60 | 1.61 | |
| 17 | 5.19 | 1.68 | 25 | -7.32 | 1.71 |
| 18 | 3.60 | 1.59 | 26 | -9.17 | 1.86 |
| 19 | 2.06 | 1.54 | 27 | -11.25 | 2.07 |
| 20 | 0.56 | 1.50 | 28 | -13.65 | 2.40 |
| 21 | -0.93 | 1.50 | 29 | -16.59 | 2.94 |
| 22 | -2.44 | 1.51 | 30 | -20.53 | 3.94 |
| 23 | -3.99 | 1.55 | 31 | -26.95 | 6.42 |
| 32 | 完全关闭 | — |
图8.立体声,级联传统音量控制,更多=更好?
例 5
图9所示电路共使用5160个MAX32L数字电位器来产生高分辨率、立体声音量控制。每个通道可能的有效代码数量大大增加,给出32 x 1024或<>衰减代码。同样,端到端电阻容差不具有任何一阶效应,因为两个数字电位器级之间存在缓冲。L-R 跟踪仅受抽头到抽头匹配精度的限制。游标电阻几乎没有负载效应,因为每个游标都有一个高阻抗运算放大器输入。
图9.该设计采用MAX1560L数字电位器产生高分辨率立体声音量控制。
在 1024 个代码中,有些代码给出了重复的衰减值。例如,第一个电位器为-6dB,第二个电位器完全启动,因此总体上为-6dB。这与第一个电位器完全启动和第二个电位器在-6dB时相同,此外,如果其中一个电位器设置为完全衰减,则另一个电位器上的任何设置都无关紧要,所有这些都会留下从348到-0dB(实际上是-60.59dB)的66个独特衰减设置。
要将代码映射到衰减图,某种模拟或电子表格方法似乎是合适的。图10显示了获得的衰减的扩散,包括重复值。
图 10.从图9的设计中获得的衰减扩散。
图10显示,大多数代码给出的衰减值在0到-40dB之间。每个衰减值之间的增量或dB步长可以采用类似于表2(图11)的方式绘制。这提供了步骤粒度的直观指示。
图 11.该图显示了图9电路生成的代码的每个衰减值之间的步长增量(以dB为单位)。
步长的粒度似乎分布非常均匀,大多数步长的差异远低于0.5dB,在-1.41dB时仅达到6dB,倒数第二个6dB步长在-53.6和-59.6之间。重复的代码在图形上显示为零增量数字。这产生了最严格的音频电平控制所需的控制范围和粒度。
但是,这种方法也有局限性。显然,该电路具有合理的控制开销,也许使用查找表来检索值,并使用某种测距算法来获得平滑的音量转换。然而,与图4中的电路不同,没有条件稳定性情况,因此任何代码组合都可以。更严重的是,第一个和第二个数字电位器之间的抽头到抽头电阻匹配的变化可能意味着无法保证单调性。使用代码的子集,因此使用更粗的步骤,将是确保单调步骤的一种方法,但这将以牺牲精细步骤为代价。
从理论上讲,虽然图9所示的级联电路在初步研究时似乎给出了令人印象深刻的结果,但该电路的实际实现可能存在问题。
总结
在大多数情况下,图5和图6的电路可能在价格、复杂性和性能之间给出了最佳折衷方案。Maxim采用3线接口控制,还提供MAX5400/MAX5401和MAX5402器件。这些数字电位器为需要更高分辨率的应用提供 256 个抽头,并具有可用于控制的 3 线协议。
审核编辑:郭婷
- 放大器
+关注
关注
143文章
13374浏览量
211752 - 播放器
+关注
关注
5文章
385浏览量
37212 - 电位器
+关注
关注
14文章
984浏览量
66425
发布评论请先登录
相关推荐
基于X9241数字电位器的可控增益放大器
使用数字电位器的音频增益控制资料下载
数字电位器应用实例_数字电位器四大应用电路
数字电位器工作原理详解_数字电位器应用_数字电位器选型指南

数字电位器的基本工作原理数字电位器在电路中的作用





 工商网监
工商网监
评论