 KUKA机器人PN网络故障的判断方法
KUKA机器人PN网络故障的判断方法
1.使用拓扑结构
前提: 厂家已经作好拓扑结构图。
方法:在带有菜单命令 Edit (编辑 ) > PROFINETIO > Topology (拓扑)的 HW Config或 NetPro
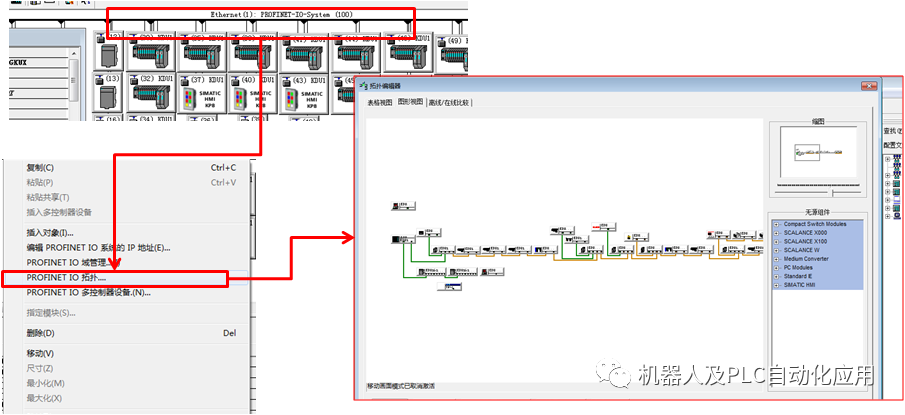
优点:
可以判断PN网络故障的具体区域范围。
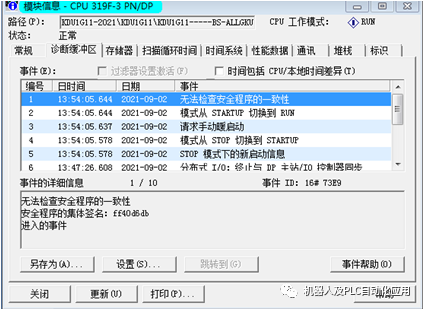
2.使用CPU诊断缓冲区来处理PN网络问题:
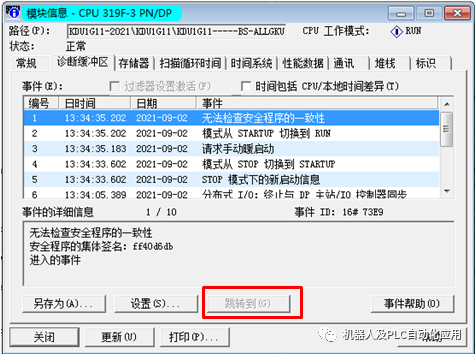
在现场中可以通过“跳转到”来找到报警输出的具体的现场设备站.
可以在以下两种情况下选择"跳转到"按钮:
•有一个对诊断事件中块相对地址的引用。
•有一个对诊断事件中模块或PNIO设备的引用。
3.通过硬件组态在线的方法来处理PN网络问题:
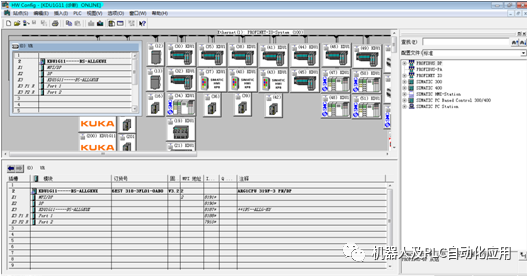
通过双击故障模块,或者故障模块的插槽点出现的“模块信息”判断故障点。
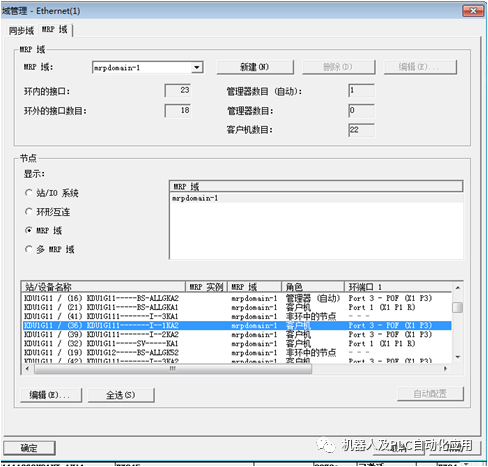
4.更换交换机的注意事项。交换机在激活环网的组态设备中不能有两个管理机.所以为了避免患上的交换机是曾经用过的交换机自带原有网络的属性,而使得新网络出现网络风暴!在交换机作为备件进行更换前进行初始化。

5.偶发钝化引起的网络故障。
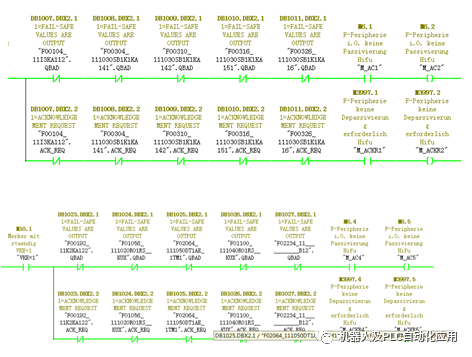
5.1.通过CPU报警提示-诊断缓冲区确定设备端口。
5.2.通过查找PLC程序确定设备端口。
通过VASS对安全设备的安全DB块上的点进行监控.
二.KUKA机器人PN系统网络故障的判断方法:
1.通过WorkVisual的PN 的拓扑功能进行网络诊断
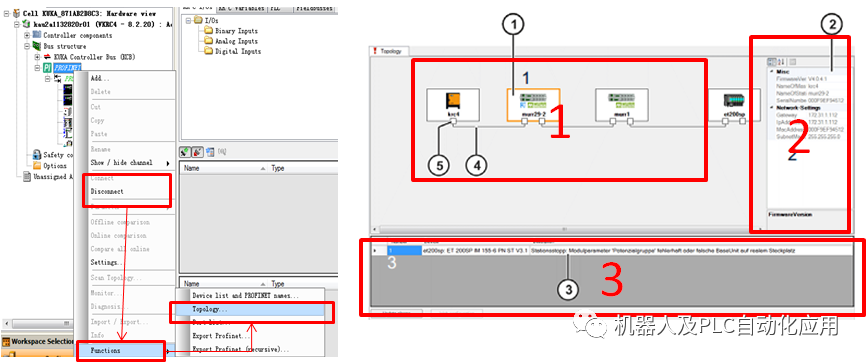
如果设备显示为白色,则存在一个与此设备的连接。如果设备显示为灰色,则不存在与此设备的连接。
2 参数窗口
为所选的设备显示不同的参数。
3 信息窗口
如果设备报错,则显示该信息提示窗口。点击 更新警报 按钮可更新显示。
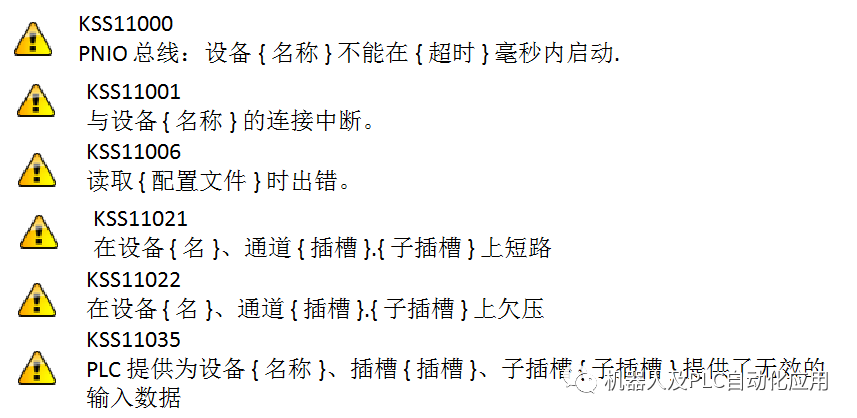
2.通过机器人KRC诊断显示.
3.通过SmartPAD诊断监视器进行诊断.诊断> 诊断监视器
工业以太网输入输出驱动程序 (PNIODriver)
工业以太网控制堆栈 (PNIO-CTRL)
工业以太网设备
工业以太网设备栈 (PNIO-DEV)
察看工业以太网设备的通讯状态:

责任编辑:彭菁
-
网络故障
+关注
关注
0文章
28浏览量
8484 -
KUKA机器人
+关注
关注
4文章
143浏览量
9071
原文标题:西门PLCS7-300/400系列及KUKA机器人PN网络故障的判断方法:
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论