 为什么以及如何控制冷却电子设备的风扇速度
为什么以及如何控制冷却电子设备的风扇速度
人们对用于控制个人计算机和其他电子设备中冷却风扇速度的集成电路的兴趣日益浓厚。紧凑型电风扇价格便宜,用于冷却电子设备已有半个多世纪的历史。然而,近年来,使用这些风扇的技术已经有了显着的发展。本文将描述这种演变是如何以及为什么发生的,并将为设计人员提供一些有用的方法。
发热和散热
电子产品,尤其是消费电子产品的趋势是向具有增强功能组合的小型产品发展。因此,许多电子元件被硬塞进非常小的外形尺寸中。一个明显的例子是笔记本电脑。薄型和“精简型”笔记本电脑大幅萎缩,但其处理能力却得以保持或提高。这种趋势的其他例子包括投影系统和机顶盒。这些系统的共同点是,除了尺寸明显更小(并且仍在缩小)之外,它们必须散发的热量不会减少;经常增加!在笔记本电脑中,大部分热量是由处理器产生的;在投影仪中,大部分热量是由光源产生的。这种热量需要安静有效地去除。
最安静的散热方法是使用散热器和热管等无源元件。然而,事实证明,这些在许多流行的消费电子产品中是不够的,而且它们也有些昂贵。一个好的替代方案是主动冷却,将风扇引入系统以在机箱和发热组件周围产生气流,从而有效地从系统中去除热量。但是,风扇是噪音源。它也是系统中的另一个功耗来源——如果要由电池供电,这是一个非常重要的考虑因素。风扇也是系统中的另一个机械组件,从可靠性的角度来看,这不是一个理想的解决方案。
速度控制 - 回答使用风扇的一些异议的一种方法 - 可以具有以下优点:
运行风扇的速度较慢会降低其发出的噪音,
运行风扇的速度较慢可以减少其消耗的功率,
运行风扇的速度较慢可提高其可靠性和使用寿命。
有许多不同类型的风扇和控制它们的方法。我们将在这里讨论各种风扇类型以及当今使用的控制方法的优缺点。对风扇进行分类的一种方法是:
2线风扇
3线风扇
4 线风扇。
这里要讨论的风扇控制方法包括:
无风扇控制
开/关控制
线性(连续直流)控制
低频脉宽调制 (PWM)
高频风扇控制。
风扇类型
2 线风扇具有电源和接地端子。3 线风扇具有电源、接地和转速(“转速”)输出,可提供频率与速度成比例的信号。4 线风扇具有电源、接地、转速输出和 PWM 驱动输入。简而言之,PWM使用一系列开关脉冲中脉冲的相对宽度来调整施加到电机的功率水平。
2线风扇通过调节低频PWM中的直流电压或脉冲宽度来控制。然而,只有两根电线,转速信号并不容易获得。这意味着没有迹象表明风扇的运行速度有多快,或者实际上,它是否正在运行。这种形式的速度控制是开环的。
可以使用与 3 线风扇相同的驱动器来控制 2 线风扇 - 可变直流或低频 PWM。2 线风扇和 3 线风扇之间的区别在于风扇反馈的可用性,用于闭环速度控制。转速信号指示风扇是否正在运行及其速度。
当转速信号由直流电压驱动时,其方波输出与图1中的“理想转速”非常相似。它始终有效,因为电源不断施加到风扇上。然而,对于低频PWM,转速信号仅在风扇通电时有效,即在脉冲的导通阶段。当PWM驱动器切换到关闭阶段时,风扇的内部转速信号生成电路也会关闭。由于转速输出通常来自漏极开路,因此当PWM驱动器关闭时,转速输出将浮高电平,如图1所示。因此,虽然理想的转速代表风扇的实际速度,但PWM驱动器实际上“斩波”了转速信号输出,并可能产生错误的读数。
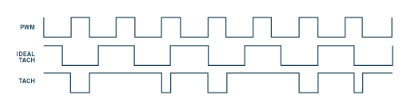
图1.3 线风扇中的转速计输出波形 — 理想且在 PWM 控制下。
为了确保在PWM控制下获得正确的风扇速度读数,有必要定期打开风扇足够长的时间以获得完整的转速周期。ADI公司的许多风扇控制器(如ADM1031和ADT7460)都实现了这一特性。
除了电源、接地和转速信号外,4线风扇还有一个PWM输入,用于控制风扇的速度。不是打开和关闭整个风扇的电源,而是仅切换驱动线圈的电源,从而使转速信息连续可用。打开和关闭线圈会产生一些换向噪声。以大于20 kHz的速率驱动线圈会将噪声移出可听范围,因此典型的PWM风扇驱动信号使用相当高的频率(>20 kHz)。4线风扇的另一个优点是风扇速度可以控制在低至风扇全速10%的速度下。图 2 显示了 3 线和 4 线风扇电路之间的差异。
图2.3 线和 4 线风扇。
风扇控制
无控制:最简单的风扇控制方法是根本不使用任何控制;只需在 100% 的时间内全速运行适当容量的风扇即可。其主要优点是保证故障安全冷却和非常简单的外部电路。但是,由于风扇始终处于打开状态,因此其使用寿命会缩短,并且即使不需要冷却,也会使用恒定的功率。此外,它不断的噪音可能会很烦人。
开/关控制:风扇控制的下一个最简单的方法是恒温或开/关控制。这种方法也很容易实现。风扇仅在需要冷却时才打开,其余时间关闭。用户需要设置需要冷却的条件,通常是当温度超过预设阈值时。
ADI公司的ADM1032是利用温度设定点进行开/关风扇控制的理想传感器。它有一个比较器,可产生THERM输出,该输出通常为高电平,但在温度超过可编程阈值时切换为低电平。当温度降至预设量低于 THERM 限值时,它会自动切换回高电平。这种可编程迟滞的优点是,当温度接近阈值时,风扇不会连续打开/关闭。图3是使用ADM1032的电路示例。
图3.开/关控制电路示例。
开/关控制的缺点是它非常有限。当风扇打开时,它会立即以可听且烦人的方式全速旋转。因为人类很快就习惯了风扇的声音,所以它的关闭也非常明显。(它可以与厨房里的冰箱进行比较。直到它关闭,你才注意到它发出的噪音。因此,从声学角度来看,开/关控制远非最佳。
线性控制:在风扇控制的下一级,线性控制,施加到风扇的电压是可变的。对于较低的速度(较少的冷却和更安静的运行),电压降低,对于较高的速度,电压增加。这种关系有局限性。例如,考虑一个 12V 风扇(额定最大电压)。这样的风扇可能需要至少 7 V 才能开始旋转。当它开始旋转时,它可能会以大约一半的全速旋转,并施加 7 V。由于需要克服惯性,启动风扇所需的电压高于保持风扇旋转所需的电压。因此,随着施加到风扇的电压降低,它可能会以较慢的速度旋转,直到 4 V,此时它将停止。这些值会因制造商而异,因型号而异,甚至因风扇而异。
ADI公司的线性风扇控制ICADM1028具有可编程输出和风扇控制可能需要的几乎所有功能,包括能够精确连接到芯片(如微处理器)上提供的温度检测二极管,这些二极管占系统中大部分耗散。(二极管的目的是提供临界结温的快速指示,避免系统中固有的所有热滞后。它允许根据芯片温度的升高立即启动冷却。为了将ADM1028使用的功耗保持在最低水平,它采用3.0 V至5.5 V电源供电,具有+2.5 V满量程输出。
5V 风扇仅允许有限范围的速度控制,因为它们的启动电压接近其 5V 全速水平。但ADM1028可与12 V风扇配合使用,只需采用简单的升压放大器和图4所示电路。
图4.用于驱动12 V风扇的升压电路,使用线性风扇控制ADM1028的DAC输出。
线性控制的主要优点是安静。但是,正如我们所指出的,速度控制范围是有限的。例如,控制电压范围为 12 V 至 7 V 的 12 V 风扇可以在 7 V 下以半速运行。使用 5-V 风扇的情况更糟。通常,5 V 风扇需要施加 3.5 V 或 4 V 才能启动,但在该电压下,它们将以接近全速的速度运行,速度控制范围非常有限。但是,从效率角度来看,使用图12所示电路以4 V电压运行远非最佳。这是因为升压晶体管消耗的功率相对较大(当风扇在 8 V 下运行时,晶体管两端的 4V 压降效率不高)。所需的外部电路也相对昂贵。
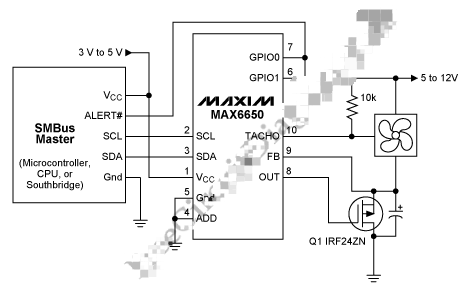
PWM控制:目前用于控制PC风扇速度的流行方法是低频PWM控制。在这种方法中,施加到风扇的电压始终为零或满量程,从而避免了在较低电压下线性控制中遇到的问题。图5所示为与ADT7460热电压控制器PWM输出配合使用的典型驱动电路。
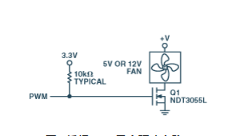
图5.低频PWM风扇驱动电路。
这种驱动方法的主要优点是简单、便宜且非常高效,因为风扇要么完全打开,要么完全关闭。
缺点是转速信息被PWM驱动信号斩波,因为电源并不总是施加到风扇上。转速信息可以使用一种称为脉冲拉伸的技术来检索 - 将风扇打开足够长的时间以收集转速信息(可能会增加可听噪声)。图6显示了脉冲拉伸的情况。
图6.脉冲拉伸以收集转速信息。
低频PWM的另一个缺点是换向噪声。当风机盘管连续打开和关闭时,可能会出现可闻噪音。为了应对这种噪声,ADI公司最新的风扇控制器设计为以22.5 kHz的频率驱动风扇,该频率超出可听范围。外部控制电路在高频PWM下更简单,但只能与4线风扇一起使用。尽管这些风扇对市场相对较新,但它们正在迅速变得越来越受欢迎。图7显示了用于高频PWM的电路。
图7.用于驱动具有高频PWM的风扇的电路。
PWM信号直接驱动风扇;驱动场效应管集成在风扇内。这种方法减少了外部元件数量,使外部电路更加简单。由于PWM驱动信号直接施加到风扇线圈上,因此风扇的电子设备始终通电,转速信号始终可用。这消除了对脉冲拉伸的需求及其可能产生的噪声。换向噪声也被消除或显着降低,因为线圈的开关频率超出了可听范围。
总结
从噪声、可靠性和功率效率的角度来看,最优选的风扇控制方法是使用高频(>20 kHz)PWM驱动器。
除了消除噪声脉冲拉伸和与低频PWM相关的换向噪声外,它还具有比线性控制更宽的控制范围。使用高频PWM,风扇可以以低至全速10%的速度运行,而同一风扇使用线性控制只能以至少50%的全速运行。它更节能,因为风扇始终完全打开或完全关闭。 (当FET关闭或饱和时,其耗散非常低,消除了线性情况下晶体管中的显着损耗。它比始终开启或开/关控制更安静,因为风扇可以以较低的速度运行 - 可以逐渐变化。最后,较慢地运行风扇还可以延长其使用寿命,从而提高系统可靠性。
|
控制方式 |
优势 |
弊 |
|
开/关 |
便宜的 |
最差的声学性能 — 风扇始终在运行。 |
|
线性 |
最安静 |
昂贵的电路效率低下——放大器电路 中的功率损失 |
|
低频脉宽调制 |
高效 测量速度时速度控制范围宽 |
风扇换向噪声 需要脉冲拉伸 |
|
高频脉宽调制 |
高效 良好的声学效果,几乎与线性一样好。便宜的外部电路 宽速度控制范围 |
必须使用 4 线风扇 |
审核编辑:郭婷
-
集成电路
+关注
关注
5387文章
11530浏览量
361609 -
PWM
+关注
关注
114文章
5181浏览量
213788 -
计算机
+关注
关注
19文章
7488浏览量
87846
发布评论请先 登录
相关推荐
地下钻探行业高温电子设备的应用
冷却风扇系统发生故障的原因
使用LM35的冷却风扇控制器
使用LM35温度传感器和ATTiny13微控制器控制风扇的教程
采用PID控制冷却水温度的步骤介绍
对流冷却设计的电源与强制冷却电源的介绍
基于智能系统监控设备的风扇速度控制技术







 工商网监
工商网监
评论