 STM32软件层实现原理
STM32软件层实现原理
一、前言
以STM32为例,打开网络上下载的例程或者是购买开发板自带的例程,都会发现应用层中会有stm32f10x.h或者stm32f10x_gpio.h,这些文件严格来时属于硬件层的,如果软件层出现这些文件会显得很乱。
使用过Linux的童鞋们肯定知道linux系统无法直接操作硬件层,打开linux或者rt_thread代码会发现代码中都会有device的源文件,没错,这就是驱动层。
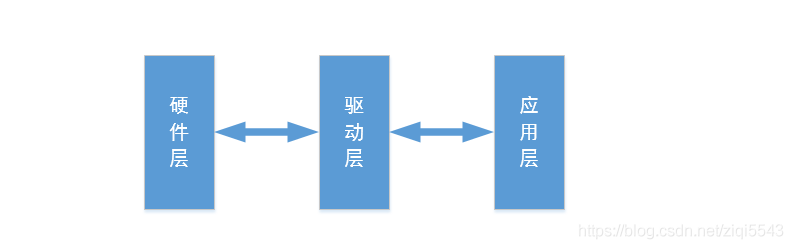
二、实现原理
原理就是将硬件操作的接口全都放到驱动链表上,在驱动层实现device的open、read、write等操作。当然这样做也有弊端,就是驱动find的时候需要遍历一遍驱动链表,这样会增加代码运行时间。
三、代码实现
国际惯例,写代码先写头文件。rt_thread中使用的是双向链表,为了简单在这我只用单向链表。有兴趣的可以自行研究rt_thread
头文件接口:
本次只实现如下接口,device_open 和device_close等剩下的接口可以自行研究。这样就可以在应用层中只调用如下接口可实现:
/*
驱动注册
*/
int cola_device_register(cola_device_t *dev);
/*
驱动查找
*/
cola_device_t *cola_device_find(const char *name);
/*
驱动读
*/
int cola_device_read(cola_device_t *dev, int pos, void *buffer, int size);
/*
驱动写
*/
int cola_device_write(cola_device_t *dev, int pos, const void *buffer, int size);
/*
驱动控制
*/
int cola_device_ctrl(cola_device_t *dev, int cmd, void *arg);;
头文件cola_device.h:
#ifndef _COLA_DEVICE_H_
#define _COLA_DEVICE_H_
enum LED_state
{
LED_OFF,
LED_ON,
LED_TOGGLE,
};
typedef struct cola_device cola_device_t;
struct cola_device_ops
{
int (*init) (cola_device_t *dev);
int (*open) (cola_device_t *dev, int oflag);
int (*close) (cola_device_t *dev);
int (*read) (cola_device_t *dev, int pos, void *buffer, int size);
int (*write) (cola_device_t *dev, int pos, const void *buffer, int size);
int (*control)(cola_device_t *dev, int cmd, void *args);
};
struct cola_device
{
const char * name;
struct cola_device_ops *dops;
struct cola_device *next;
};
/*
驱动注册
*/
int cola_device_register(cola_device_t *dev);
/*
驱动查找
*/
cola_device_t *cola_device_find(const char *name);
/*
驱动读
*/
int cola_device_read(cola_device_t *dev, int pos, void *buffer, int size);
/*
驱动写
*/
int cola_device_write(cola_device_t *dev, int pos, const void *buffer, int size);
/*
驱动控制
*/
int cola_device_ctrl(cola_device_t *dev, int cmd, void *arg);
#endif