 干货分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南
干货分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南
简介
本文主要介绍了HPM6750的控制器局域网CAN(以下简称CAN控制器)的概述以及基于HPM-SDK CAN控制器的开发指导(包括实现CAN2.0、CAN-FD)。
CAN控制器
1. 概述
CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO 国际标准化的串行通信协议。HPM6750 MCU搭载了4路CAN控制器,CAN0/CAN1/CAN2/CAN3,它们具有如下特性:
● 支持 CAN 2.0B 协议,支持多达 8 字节的数据载荷, 数据速率可达 1Mbit/s;
● 支持 CAN FD 协议,支持多达 64 字节的数据载荷, 数据速率可达 2.5Mbit/s;
● 支持 1 ∼ 1/256 的波特率预分频,灵活配置波特率;
● 16 个接收缓冲器;
– FIFO 方式;
– 错误或者不被接收的数据不会覆盖存储的消息;
● 1 个高优先主发送缓冲器 PTB;
● 8 个副发送缓冲器 STB;
– FIFO 方式;
– 优先级仲裁方式;
● 16 组独立的筛选器;
– 支持 11 位标准 ID 和 29 位扩展 ID;
– 可编程 ID CODE 位以及 MASK 位;
● PTB/STB 均支持支持单次发送模式;
● 支持静默模式;
● 支持回环模式;
● 支持待机模式;
● 支持捕捉传输的错误种类以及定位仲裁失败位置;
● 可编程的错误警告值;
● 支持 ISO11898-4 规定时间触发 CAN 以及接收时间戳可配置停止位:1位,1.5位或者2位。
2. 系统框图
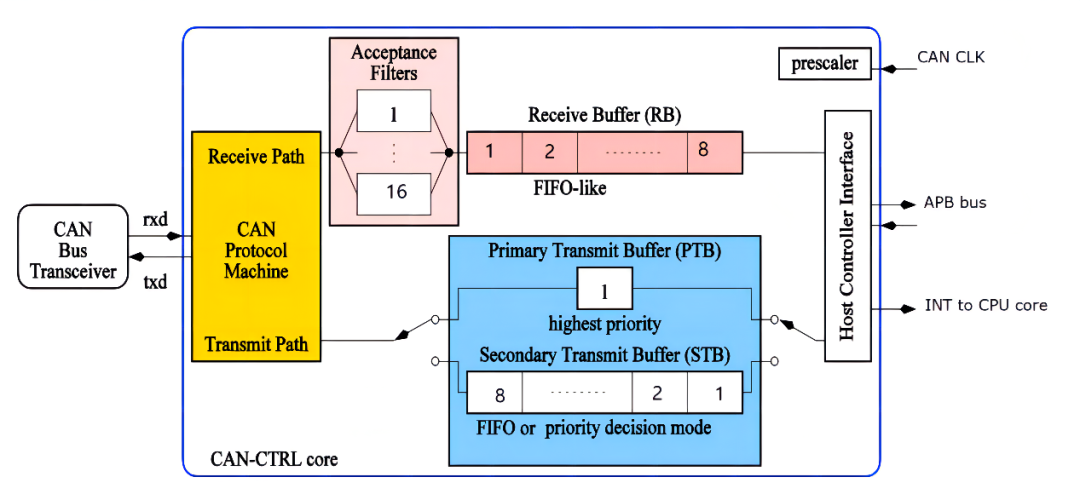
3. 管脚
| 管脚名称 | 方向 | 功能说明 |
| RXD | 输入 | CAN接受数据信号 |
| TXD | 输出 | CAN 发送数据信号 |
| STBY | 输出 | CAN 外部收发器待机控制信号 |
CAN控制器功能开发指引
1. API功能描述
CAN开发主要使用以下接口:
//获取CAN默认配置hpm_stat_t can_get_default_config(can_config_t *config);//CAN初始化接口hpm_stat_t can_init(CAN_Type *base, can_config_t *config, uint32_t src_clk_freq);//接收过滤器配置hpm_stat_t can_set_filter(CAN_Type *base, const can_filter_config_t *config);//CAN数据发送接口(阻塞模式)hpm_stat_t can_send_message_blocking(CAN_Type *base, const can_transmit_buf_t *message);//CAN高优先级数据发送接口(PTB阻塞模式)hpm_stat_t can_send_high_priority_message_blocking(CAN_Type *base, const can_transmit_buf_t *message);//CAN 数据接收接口(阻塞模式)hpm_stat_t can_receive_message_blocking(CAN_Type *base, can_receive_buf_t *message);//CAN数据接收接口(非租塞模式)hpm_stat_t can_read_received_message(CAN_Type *base, can_receive_buf_t *message);//设置发送补偿及使能(CAN-FD高速率使用,TDC)void can_set_transmitter_delay_compensation(CAN_Type *base, uint8_t sample_point, bool enable);
2. API数据结构
2.1 CAN配置
typedef struct { union { struct { //当禁用use_lowlevel_timing_setting时,以下参数有效。 uint32_t baudrate; //CAN 2.0波特率设定 uint32_t baudrate_fd; // CAN-FD波特率设定,当enable_canfd使能才有效 uint16_t can20_samplepoint_min; //CAN 2.0最小采样点(0~1000) uint16_t can20_samplepoint_max; //CAN 2.0最大采样点(0~1000) uint16_t canfd_samplepoint_min; //CAN-FD 最小采样点(0~1000) uint16_t canfd_samplepoint_max; //CAN-FD 最大采样点(0~1000) }; struct {//当启用use_lowlevel_timing_setting时,以下参数有效。 can_bit_timing_param_t can_timing; //CAN2.0 位时间参数 can_bit_timing_param_t canfd_timing; //CAN-FD 位时间参数 }; };can_loopback_mode_t loopback_mode; //CAN回环模式,默认是正常模式bool use_lowlevel_timing_setting; //是否启用位时间参数设定 bool enable_canfd; //是否启用CAN-FD bool enable_self_ack; //是否启用自ACK帧bool disable_re_transmission_for_ptb; //是否禁用高优先级PTB发送重传, false:单发模式 true:重传模式bool disable_re_transmission_for_stb; //是否禁用STP发送重传, false:单发模式, true:重传模式uint16_t filter_list_num; //接受过滤器list总数can_filter_config_t *filter_list; //接受过滤器list指针} can_config_t;
2.2 CAN过滤配置
/** * @brief CAN acceptance filter modes */typedef enum _can_filter_mode { can_filter_mode_both_frames, //标准格式和扩展格式过滤选模式can_filter_mode_standard_frames, //标准格式过滤模式can_filter_mode_extended_frames, //扩展格式过滤模式} can_filter_mode_t;
/** * @brief CAN acceptance configuration */typedef struct {uint16_t index; //过滤器indexcan_filter_mode_t mode; //过滤器模式 bool enable; //过滤器是否使能 uint32_t code; //ID code uint32_t mask; //ID mask} can_filter_config_t;
2.3 CAN发送
/** * @brief CAN transmit buffer data structure */typedef union _can_tx_buf {uint32_t buffer[18]; //发送 buffer,由于是联合体,和下面的共享一块内存区域,buffer大小:4*18=72struct { struct { uint32_t id: 29; //CAN ID uint32_t : 1; uint32_t transmit_timestamp_enable: 1; //时间戳使能 }; struct { uint32_t dlc: 4; //数据长度 uint32_t bitrate_switch: 1; //bitrate开关 uint32_t canfd_frame: 1; //can-fd标识位 uint32_t remote_frame: 1; //remote 标识位 uint32_t extend_id: 1; //扩展ID uint32_t : 24; }; uint8_t data[]; //数据指针 };} can_transmit_buf_t;
2.4 CAN接收
/** * @brief CAN receive buffer data structure */typedef union _can_rx_buf { uint32_t buffer[20]; //接收buffer,由于是联合体,和下面的数据共享一块内存区域 struct { struct { uint32_t id: 29; //can id uint32_t : 1; uint32_t error_state_indicator: 1; //错误状态指示 }; struct { uint32_t dlc: 4; //数据长度 uint32_t bitrate_switch: 1; //bitrate开关 uint32_t canfd_frame: 1; //canfd 标识 uint32_t remote_frame: 1; //remote标识 uint32_t extend_id: 1; //扩展ID uint32_t : 4; uint32_t loopback_message: 1; //回环数据标识 uint32_t error_type: 3; //错误类型 uint32_t cycle_time: 16; //cycle time }; uint8_t data[]; //数据指针 };} can_receive_buf_t;
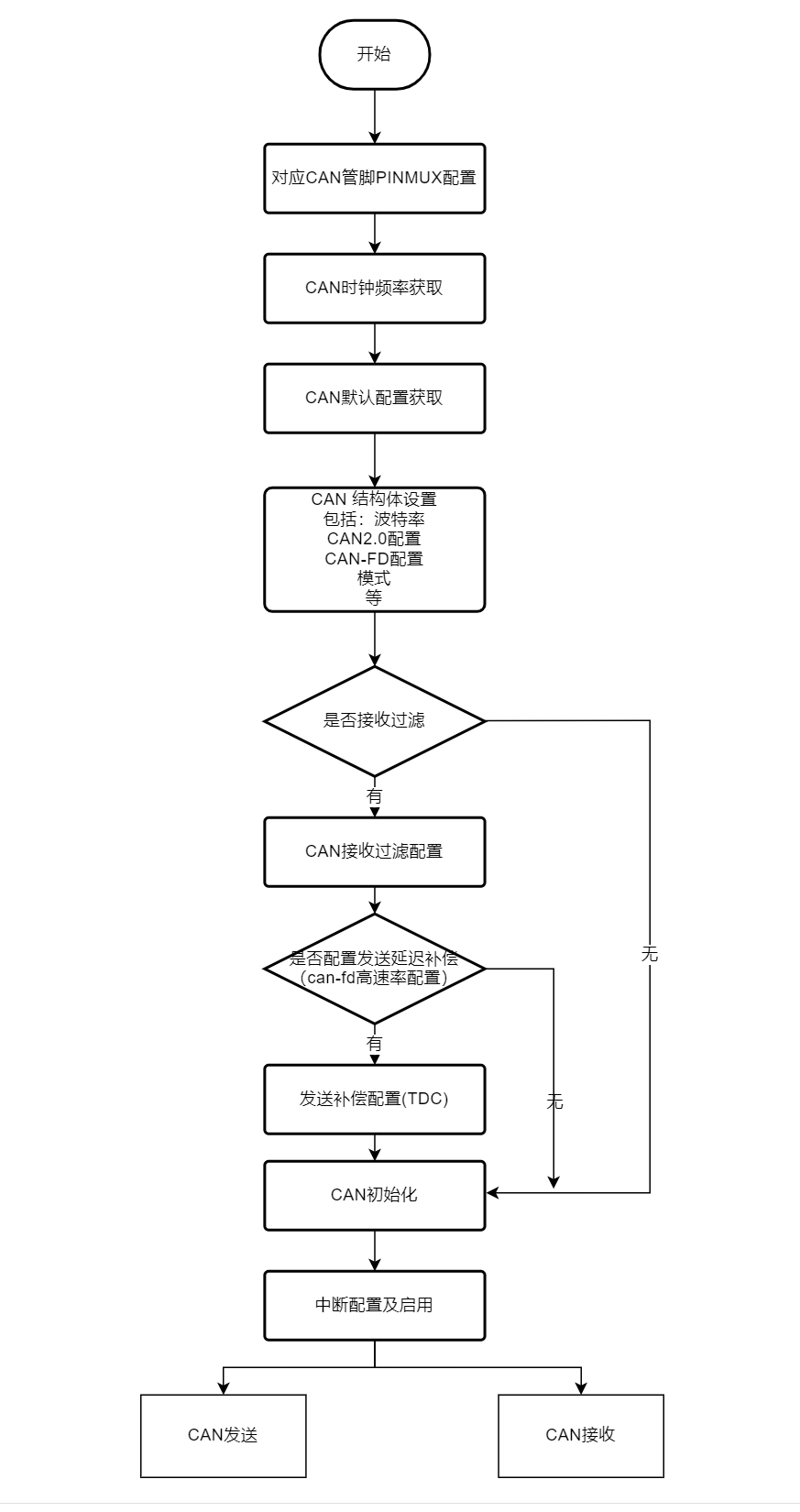
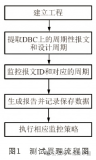
3. 配置流程
CAN控制器的CAN2.0和CAN-FD配置流程如下图。
4. 样例
4.1 内部回环样例
需求:
1.CAN-FD协议
2.波特率2.5Mbps
3.内部回环模式
4.数据载荷64字节
5.遍历can-id从0~2047(11位标准ID)
6.每帧数据确保不同
7.阻塞发送、非阻塞接收(非中断模式)
8.对比接收和发送的数据包是否相等,并输出结果
void board_can_loopback_test(void){ bool result; uint32_t error_cnt = 0; uint32_t can_src_clk_freq; can_config_t can_config; board_init_can(BOARD_APP_CAN_BASE); can_src_clk_freq = board_init_can_clock(BOARD_APP_CAN_BASE); can_config.baudrate = 1000000; /* 1Mbps */ can_config.baudrate_fd = 2500000; /*5Mbps*/ can_config.loopback_mode = can_loopback_internal; //内部回环 can_config.enable_canfd = true; hpm_stat_t status = can_init(BOARD_APP_CAN_BASE, &can_config, can_src_clk_freq); if (status != status_success) { printf("CAN initialization failed, error code: %d\n", status); return; } can_transmit_buf_t tx_buf; can_receive_buf_t rx_buf; memset(&tx_buf, 0, sizeof(tx_buf)); memset(&rx_buf, 0, sizeof(rx_buf)); tx_buf.dlc = can_payload_size_64; tx_buf.canfd_frame = 1; tx_buf.bitrate_switch = 1; for (uint32_t i = 0; i < 2048; i++) { tx_buf.id = i; for (uint32_t j = 0; j < 64u; j++) { tx_buf.data[j] = (uint8_t)i + j + 1; } can_send_message_blocking(BOARD_APP_CAN_BASE, &tx_buf); can_read_received_message(BOARD_APP_CAN_BASE, &rx_buf); result = can_buf_compare(&tx_buf, &rx_buf); if (!result) { error_cnt++; can_set_transmitter_delay_compensation(BOARD_APP_CAN_BASE, 64, true); hpm_stat_t status = can_init(BOARD_APP_CAN_BASE, &can_config, can_src_clk_freq); if (status != status_success) { printf("CAN initialization failed, error code: %d\n", status); return; } printf("ID=%08x, result:%s\n", rx_buf.id, result ? "passed": "failed"); } } printf(" CAN loopback test for extend frame %s, error_cnt:%d\n", error_cnt == 0 ? "passed" : "failed", error_cnt);}
4.2 两路闭环收发样例
需求:
1.CAN2.0协议
2.波特率1000000,1Mbps
3.CAN0发送,CAN1接收
4.数据载荷8字节
5.CAN0阻塞发送,CAN1阻塞接收
6.对比CAN0发送包和CAN1接收包是否相同,并输出结果
7.压测100次,输出最终结果
void can0_can1_rxrx_loop_test(void){ pm_stat_t status; can_config_t can_config; bool use_canfd = false; can_get_default_config(&can_config); can_config.baudrate = 1000000; /* 1Mbps */ can_config.baudrate_fd = 5000000; /* 2Mbps */ can_config.enable_canfd = use_canfd; board_init_can(HPM_CAN0); board_init_can(HPM_CAN1); uint32_t can_src_clk_freq0 = board_init_can_clock(HPM_CAN0); uint32_t can_src_clk_freq1 = board_init_can_clock(HPM_CAN1); hpm_stat_t status0 = can_init(HPM_CAN0, &can_config, can_src_clk_freq0); if (status0 != status_success) { printf("CAN initialization failed, error code: %d\n", status0); return; } hpm_stat_t status1 = can_init(HPM_CAN1, &can_config, can_src_clk_freq1); if (status1 != status_success) { printf("CAN initialization failed, error code: %d\n", status1); return; } printf("CMD_STA_CMD_CTRL(0xA0)= %08x\n", HPM_CAN0->CMD_STA_CMD_CTRL); printf("F_PRESC = %08x\n", HPM_CAN0->F_PRESC); printf("S_PRESC = %08x\n", HPM_CAN0->S_PRESC); printf("TDC = %08x\n", HPM_CAN0->TDC); uint32_t error_cnt = 0; bool result = false; can_transmit_buf_t tx_buf; can_receive_buf_t rx_buf; memset(&tx_buf, 0, sizeof(tx_buf)); memset(&rx_buf, 0, sizeof(rx_buf)); tx_buf.id = 0x101; uint32_t id_max; if (!use_canfd) { tx_buf.dlc = can_payload_size_8; id_max = 8; } else { tx_buf.dlc = can_payload_size_8; id_max = 64; tx_buf.canfd_frame = 1; tx_buf.bitrate_switch = 1; } for(int index = 0; index < 100; index++) { for (uint32_t i = 0; i < id_max; i++) { tx_buf.data[i] = (uint8_t)(index+i); } can_send_high_priority_message_blocking(HPM_CAN0, &tx_buf); can_receive_message_blocking(HPM_CAN1, &rx_buf); result = can_buf_compare(&tx_buf, &rx_buf); if (!result) { error_cnt++; printf(" CAN0->CAN1 for standard frame %s\n", result ? "passed" : "failed"); } can_receive_message_blocking(HPM_CAN0, &rx_buf); result = can_buf_compare(&tx_buf, &rx_buf); if (!result) { error_cnt++; printf(" CAN1->CAN0 for standard frame %s\n", result ? "passed" : "failed"); } } printf(" CAN can0 can1 rxrx loop test for result: %s, error_cnt:%d\n", error_cnt == 0 ? "passed" : "failed", error_cnt);}
4.3 四路收发样例
需求:
1.CAN-FD协议
2.波特率2.5Mbps
3.数据载荷64字节
4.启用中断接收
5.CAN0/CAN1/CAN2/CAN3顺序发送数据
6.确保CAN0/CAN1/CAN2/CAN3 can-id不同
7.确保每次发送的数据包内容不同
8.分别对比每次一路CAN发送数据包和其它三路CAN接收的数据包是否相同,并输出结果
9.压测100次,并输出结果
static can_info_t s_can_info[] = { { .can_base = HPM_CAN0 }, { .can_base = HPM_CAN1 },#if defined(HPM_CAN2) { .can_base = HPM_CAN2 },#endif#if defined (HPM_CAN3) { .can_base = HPM_CAN3 },#endif};volatile static bool has_new_rcv_msg_array[4];volatile static can_receive_buf_t s_can_rx_buf_array[4];SDK_DECLARE_EXT_ISR_M(IRQn_CAN0, board_can_isr0);SDK_DECLARE_EXT_ISR_M(IRQn_CAN1, board_can_isr1);SDK_DECLARE_EXT_ISR_M(IRQn_CAN2, board_can_isr2);SDK_DECLARE_EXT_ISR_M(IRQn_CAN3, board_can_isr3);void board_can_isr0(void){ uint8_t flags = can_get_tx_rx_flags(HPM_CAN0); if ((flags & CAN_EVENT_RECEIVE) != 0) { can_read_received_message(HPM_CAN0, (can_receive_buf_t *)&s_can_rx_buf_array[0]); has_new_rcv_msg_array[0] = true; } can_clear_tx_rx_flags(HPM_CAN0, flags);}void board_can_isr1(void){ uint8_t flags = can_get_tx_rx_flags(HPM_CAN1); if ((flags & CAN_EVENT_RECEIVE) != 0) { can_read_received_message(HPM_CAN1, (can_receive_buf_t *)&s_can_rx_buf_array[1]); has_new_rcv_msg_array[1] = true; } can_clear_tx_rx_flags(HPM_CAN1, flags);}void board_can_isr2(void){ uint8_t flags = can_get_tx_rx_flags(HPM_CAN2); if ((flags & CAN_EVENT_RECEIVE) != 0) { can_read_received_message(HPM_CAN2, (can_receive_buf_t *)&s_can_rx_buf_array[2]); has_new_rcv_msg_array[2] = true; } can_clear_tx_rx_flags(HPM_CAN2, flags);}void board_can_isr3(void){ uint8_t flags = can_get_tx_rx_flags(HPM_CAN3); if ((flags & CAN_EVENT_RECEIVE) != 0) { can_read_received_message(HPM_CAN3, (can_receive_buf_t *)&s_can_rx_buf_array[3]); has_new_rcv_msg_array[3] = true; } can_clear_tx_rx_flags(HPM_CAN3, flags);}void board_can0_1_2_3_txrx_loop_test(void){ hpm_stat_t status; can_config_t can_config; bool use_canfd = true; can_get_default_config(&can_config); can_config.baudrate = 1000000; /* 1Mbps */ can_config.baudrate_fd = 2500000; /* 5Mbps */ can_config.enable_canfd = use_canfd; /* Initialize CAN */ for (uint32_t i=0; i < ARRAY_SIZE(s_can_info); i++) { can_info_t *info = &s_can_info[i]; board_init_can(info->can_base); info->clock_freq = board_init_can_clock(info->can_base); status = can_init(info->can_base, &can_config, info->clock_freq); if (status != status_success) { printf("CAN %d initialization failed, error code: %d\n", i, status); return; } printf("CMD_STA_CMD_CTRL(0xA0)= %08x\n", info->can_base->CMD_STA_CMD_CTRL); printf("F_PRESC = %08x\n", info->can_base->F_PRESC); printf("S_PRESC = %08x\n", info->can_base->S_PRESC); printf("TDC = %08x\n", info->can_base->TDC); can_enable_tx_rx_irq(info->can_base, CAN_EVENT_RECEIVE); } intc_m_enable_irq_with_priority(IRQn_CAN0, 1); intc_m_enable_irq_with_priority(IRQn_CAN1, 1); intc_m_enable_irq_with_priority(IRQn_CAN2, 1); intc_m_enable_irq_with_priority(IRQn_CAN3, 1);
uint32_t error_cnt = 0; bool result = false; can_transmit_buf_t tx_buf[4]; uint32_t data_max; memset(tx_buf, 0, sizeof(tx_buf)); for(int i = 0; i < 4; i ++) { tx_buf[i].id = i+1; if (!use_canfd) { tx_buf[i].dlc = can_payload_size_8; data_max = 8; } else { tx_buf[i].canfd_frame = 1; tx_buf[i].bitrate_switch = 1; tx_buf[i].dlc = can_payload_size_64; data_max = 64; } } for(int index = 0; index < 100; index++) { for(uint32_t can_i = 0; can_i < 4; can_i++) { for (uint32_t i = 0; i < data_max; i++) { tx_buf[can_i].data[i] = (uint8_t)(index+can_i+i); } } for(uint32_t can_i = 0; can_i < 4; can_i++) { can_send_high_priority_message_blocking(s_can_info[can_i].can_base, &tx_buf[can_i]); for(int j= 1; j < 4; j++) { printf("recv canid:%d\n", (can_i+j)%4); while(!has_new_rcv_msg_array[(can_i+j)%4]) { } has_new_rcv_msg_array[(can_i+j)%4] = false; result = can_buf_compare(&tx_buf[can_i], &s_can_rx_buf_array[(can_i+j)%4]); if (!result) { error_cnt++; } printf(" CAN%d->CAN%d for standard frame %s\n", can_i, (can_i+j)%4, result ? "passed" : "failed"); } } } printf(" CAN can0 can1 rxrx loop test for result: %s, error_cnt:%d\n", error_cnt == 0 ? "passed" : "failed", error_cnt);}
划重点
使用HPM6750的CAN控制器,可以轻松实现4路CAN2.0/CAN-FD同时收发数据,易于实现CAN网络隔离以及网络中继的复杂需求,实现了工业网关的功能。
-
CAN
+关注
关注
57文章
2744浏览量
463605
发布评论请先 登录
相关推荐
虹科干货 三代CAN技术演进:从CAN CC到CAN XL的创新路径(上篇)
HPM6750 Bootloader设计
CAN FD与传统CAN的区别是什么


从替代到创新,国产CAN FD芯片持续突破
虹科技术 全新Linux环境PCAN驱动程序发布!CAN/CAN FD通信体验全面升级!
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?
全新Linux环境PCAN驱动程序发布!CAN/CAN FD通信体验全面升级!
汽车CAN FD总线测试原理及应用
什么是CAN2.0协议?

CAN总线最大能够带多少节点?CANFD相对于CAN2.0有哪些差异呢?
如何使用DSLogic分析CAN/CAN-FD 信号?

通过系统级测试来避免 CAN 收发器的数据传输问题





 工商网监
工商网监
评论