 找方案 | 基于Microchip dsPIC® 的高效冰箱压缩机方案
找方案 | 基于Microchip dsPIC® 的高效冰箱压缩机方案
1 简介
与传统的单相交流电机相比,PMSM电机的效率更高、噪声更低,因此被广泛应用于家用 电冰箱压缩机中。典型的冰箱电气控制系统包含2个控制板,一个用于控制冰箱系统,另一 个用于控制压缩机。
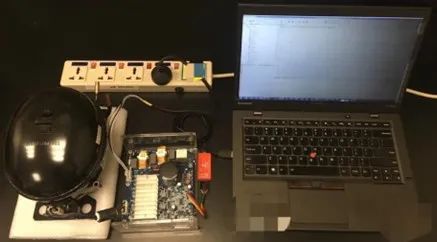
本冰箱压缩机开发参考设计(Refrigerator Compressor Development Reference Design, RCDRD)旨在帮助工程师使用dsPIC数字信号控制器(Digital Signal Controller,DSC) 开发PMSM压缩机控制应用。本开发参考设计的目标是为内置永磁同步电机( Interior Permanent Magnet Synchronous Motor,IPMSM)和表面永磁同步电机(Surface Permanent Magnet Synchronous Motor,SPMSM)压缩机提供一种极具竞争力的无传感器控制解决方 案,兼具硬件和软件。额定连续输出电流为0.65A(RMS)。当在室温环境下以187V至264V单相输入电压运行 时,最高可达到约250W的连续输出功率。对于压缩机的瞬时高压操作,峰值输出功率为 350W。有关RCDRD硬件的更多详细信息,请参见第2章“硬件说明”。本文档介绍如何使用RCDRD原型1。下面的图1-1给出了此参考设计的图片。

图1-1 冰箱压缩机开发参考设计
1.1 系统和工具要求
1.1.1 基本要求
冰箱压缩机开发板(Refrigerator Compressor Development Board,RCDB)。
MPLABX V5.10或更高版本。
编译器XC16 V1.33或更高版本。
PICkit 3/PICkit 4在线调试器(部件编号:PG164130/PG164140)。
1.1.2 高级要求
以下要求适用于诊断和测试用具功能。
MCP2200隔离式USB转UART演示板(部件编号:ADM00276)。
4条杜邦线。
X2C Scope插件30。
2 硬件说明
2.1 简介
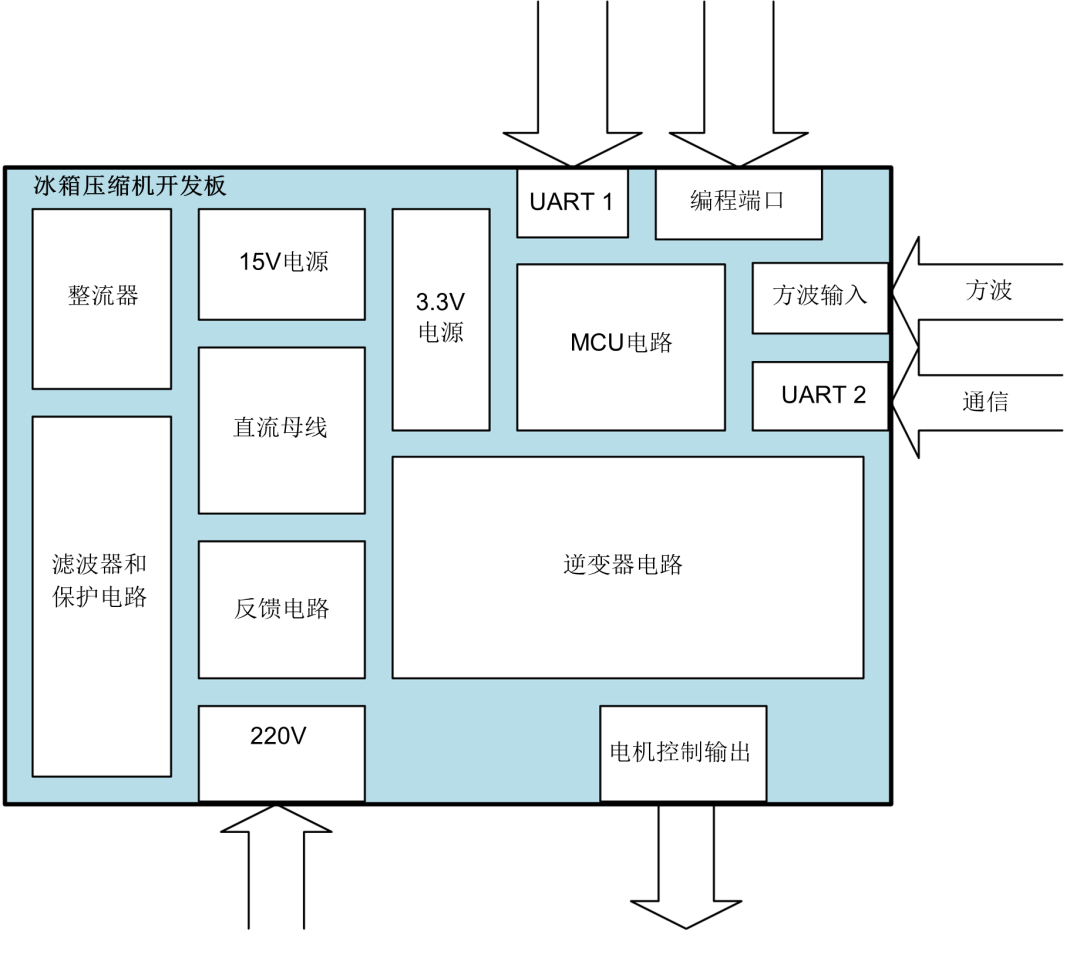
RCDB由220V交流电网供电,使用dsPIC33EP64MC202控制压缩机电机。输入的220V交 流电压经过滤波器和保护电路,然后通过整流器电路转换为直流电压。辅助电源电路为 MCU、反馈电路和三相逆变桥电路提供非隔离15V和3.3V电压。下面的图2-1给出了开发板 的图片,而图2-2给出了框图。

图2-1 冰箱压缩机开发板
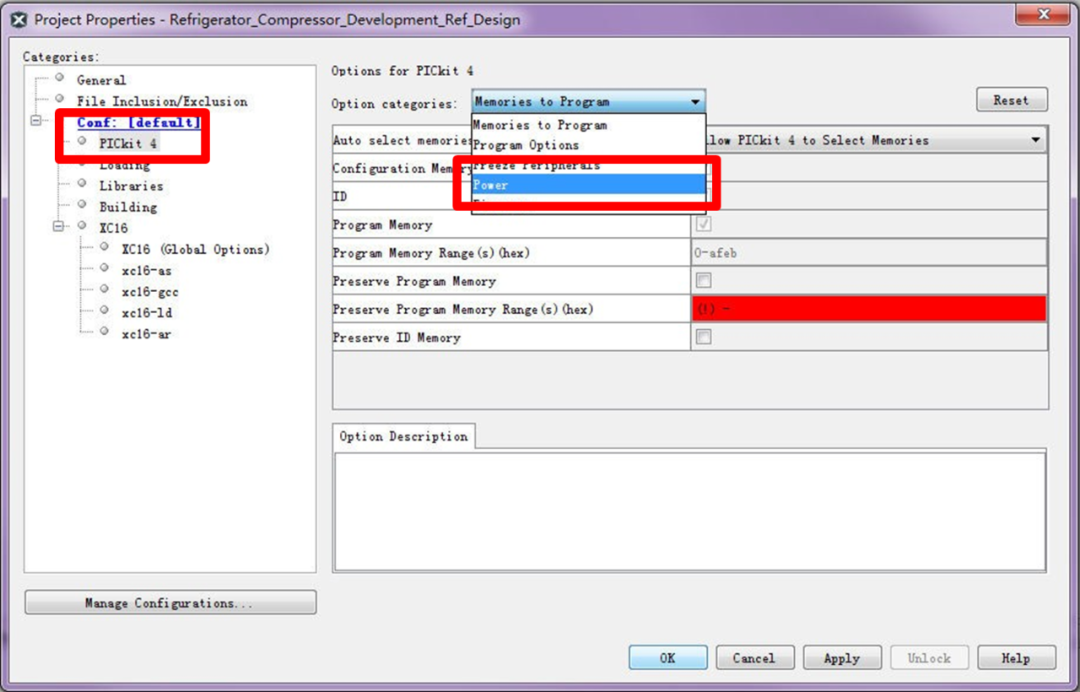
图2-2 RCDB框图
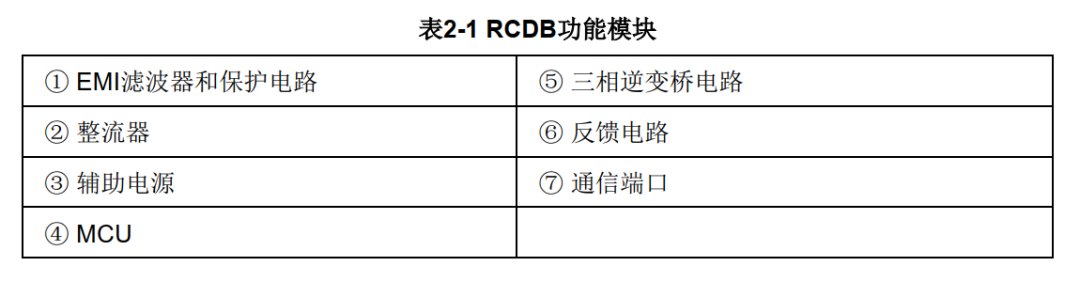
2.2 关键功能模块
RCDB具有各种功能模块:EMI滤波器和保护电路、整流器、辅助电源、MCU、逆变器、反 馈电路以及通信端口。图2-3和表2-1中标记了这些模块。
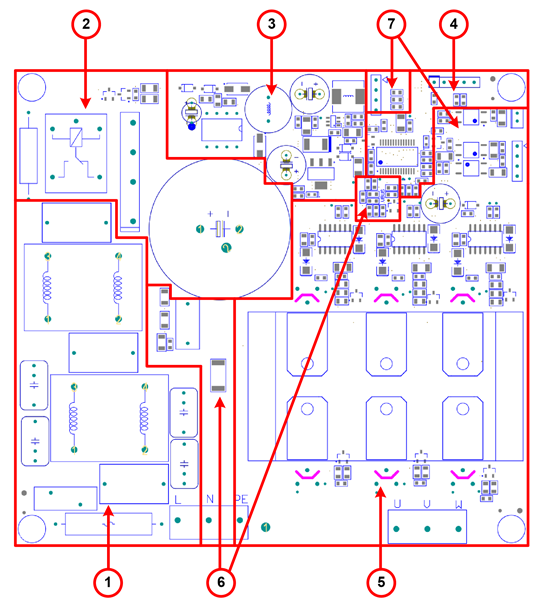
图2-3 RCDB
2.2.1 EMI滤波器和保护电路
开发板的输入电源先经过EMI滤波器和保护模块,如下面的图 2-4 所示。F300 是一个 250 VAC/10A快速熔断器,在电流达到其额定值的1000%时,断开时间为0.03s。Vst300是一个名称为TVR14561D的氧化锌压敏电阻,用于浪涌保护。EMI滤波器包含两级。如果只有一 级滤波器有效,则应将CY300、CY303、CX302、L301和CX300脱焊,并将L301短路。
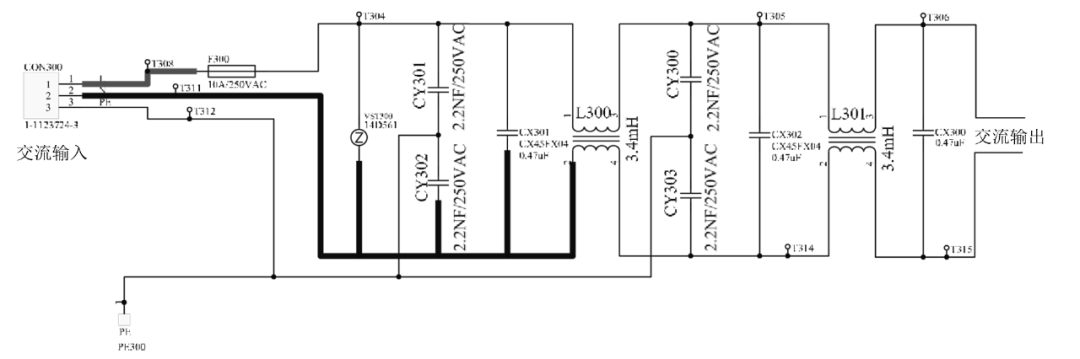
图2-4 EMI滤波器和保护电路
2.2.2 整流器
此模块包括一个浪涌电流保护电路、一个单相全桥整流器和一个直流母线电容,如下面的 图2-5所示。开发板上电时,功率电阻R305会抑制浪涌电流。直流母线电容完全充电后,继 电器RL30会将功率电阻短路。单相桥式整流器DB300会将工频输入交流电压转换为恒定的直流电压。
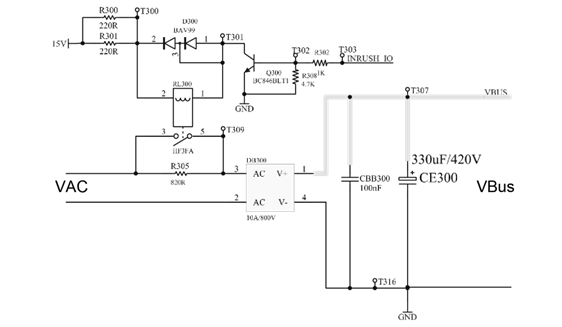
图2-5 整流器电路
2.2.3 辅助电源
辅助电源将分别为IGBT驱动器和dsPIC33EP64MC202生成15V和3.3V电压。
图2-6给出了辅助电源的框图。15V电源轨将整流器输出直接降压得到。这样可以省去反激方法中使用的变压器和高额定电压元件。MCP16331用于将此15V电压降至5V。MIC5239 LDO将电压从5V稳压至3.3V,以便为控制芯片dsPIC33EP64MC202提供干净的电源。除了 控制芯片之外,此3.3V电源轨还将为其他数字和vwin 控制电路供电,例如ADC参考和反馈 电路。这种方法可提供良好的辅助电源,而功耗却很低。
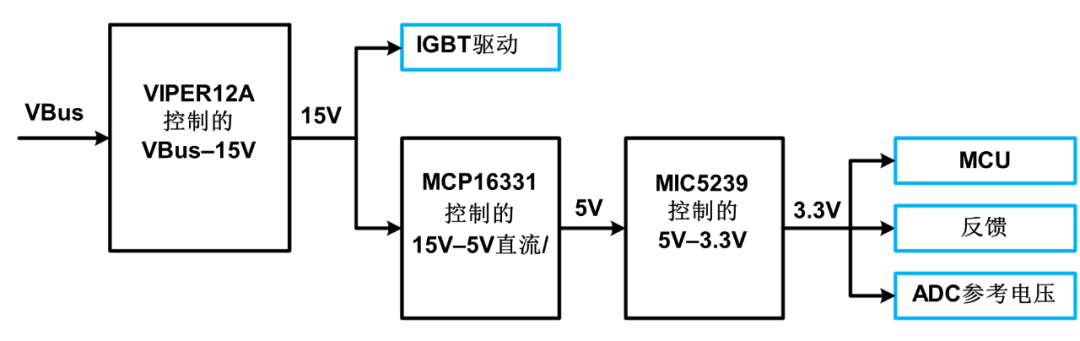
图2-6 辅助电源
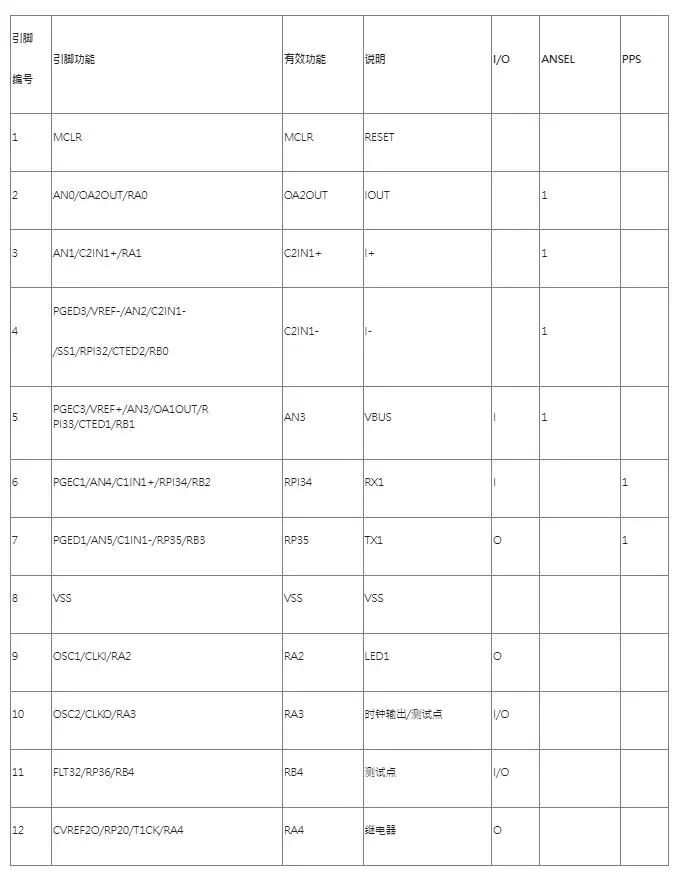
2.2.4 MCU
本设计中选择的是dsPIC33EP64MC202。另外,还有一种方法是由单个芯片同时控制冰箱 系统和压缩机。Microchip提供了dsPIC33EP或dsPIC33CK系列的许多其他产品,可以很好 地满足应用的需求。
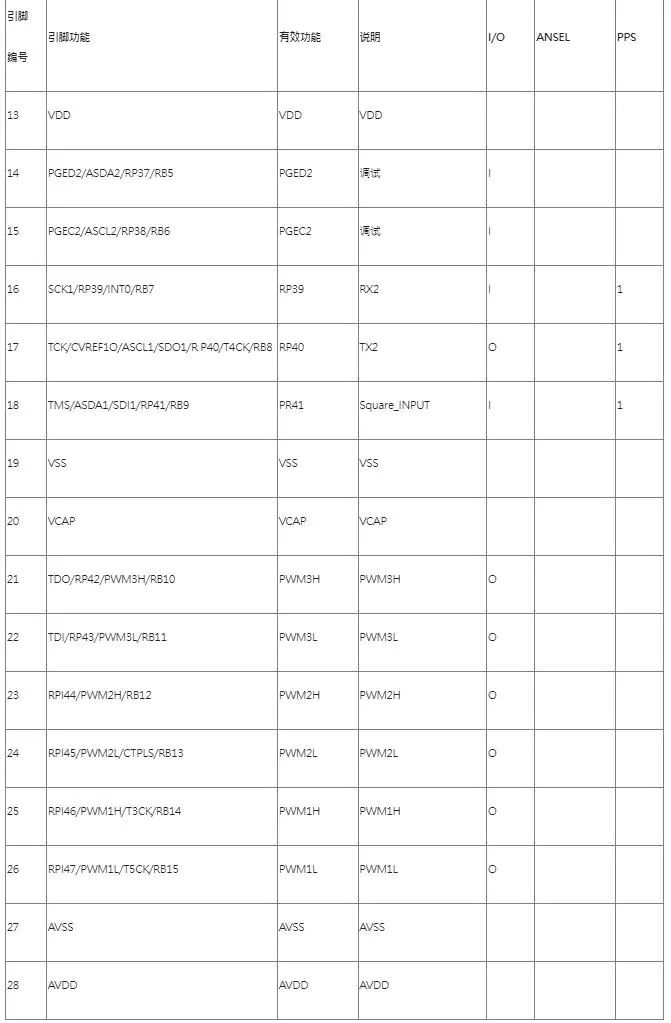
下表列出了本设计中的芯片引脚功能。
表2-2 dsPIC33EP64MC202引脚功能(SSOP)
2.2.5 逆变器电路
三相逆变器采用分立IGBT和单电流检测电阻以节省系统成本。其中包括:
6个600V/15A IGBT
3个600V半桥IGBT驱动器MIC4608
单电流检测电阻,用于电机相电流检测
PWM开关频率为2.5 kHz
MCU将PWM信号提供给3个半桥驱动器以开关6个IGBT,从而为电机各相供电。单电流检 测电阻在负直流母线上以串联方式连接,用于电流反馈和过流保护。
为简单起见,图2-7中仅给出了三相逆变器电路中的一相。
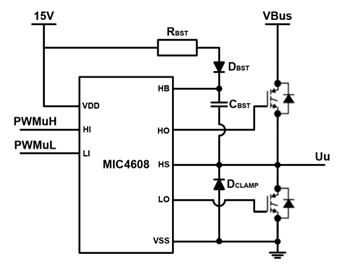
图2-7 单相逆变桥电路图
自举电路 MIC4608的上桥臂驱动器用于驱动源极端子以HS引脚为参考的浮动N沟道IGBT。MIC 4608 中的电平转换电路将以VSS引脚为参考的下桥臂电路与以HS引脚为参考的上桥臂驱动器隔 离。当HS引脚的电压升高时,上桥臂驱动器由自举电容(CBST)供电。
HS节点钳位 建议在开关节点与HS引脚之间使用二极管钳位,以最大程度地减少HS引脚上较大的负毛刺 或脉冲。
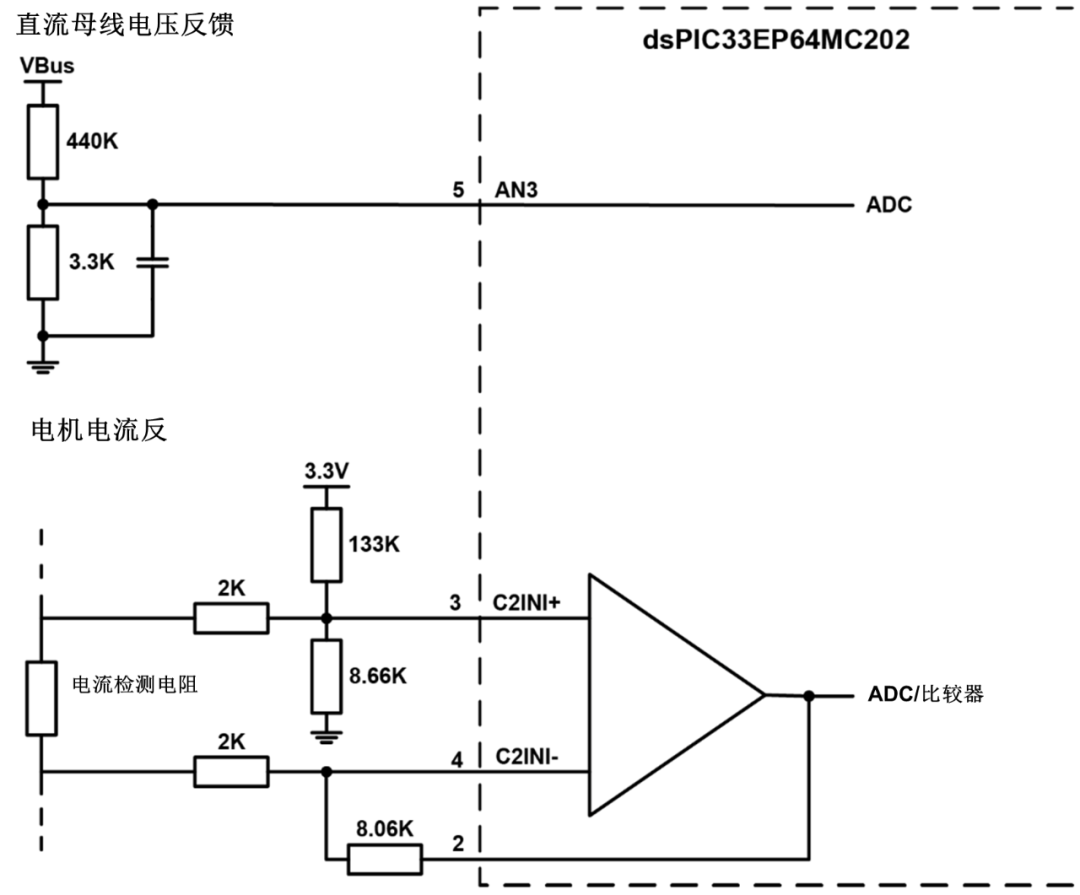
有关自举电路和HS节点钳位的更多详细信息,请参见MIC4608数据手册。2.2.6 反馈电路 通过对直流母线电压和电机相电流进行采样,实现电机控制和保护。
直流母线电压反馈。它由分压器和低通RC滤波器组成。分压器将直流母线电压分压为3.3V/443.3V以匹配MCU逻辑电平。
电机电流反馈。电流检测电阻位于三个下桥臂开关的发射极和“ DC-”之间。dsPIC33EP64MC202提供内部运算放大器(运放)和比较器,用于放大电机电流和 进行过流保护。运放的增益设置为4,电流检测电阻电压信号偏移0.2 VDC。因此, 电机的相电流范围为-4.125A至+4.125A。
图2-8给出了反馈电路的位置。
2.2.7 通信端口
RCDB提供了三个端口,用于与调试工具和/或系统控制板之间相互收发数据。所有这些端 口均由3.3V电源轨供电。
UART1通信端口是非隔离式端口,能够直接转换板上dsPICDSC输入和输出的UART信号。此端口用于与计算机/MPLAB X IDE通信。注:UART1端口是非隔离式端口。直接将此端口与其他非隔离系统连接时,损 坏电路板的风险较大。强烈建议将此端口与MCP2200隔离式USB-UART演示板 或其他隔离式USB-UART转换器连接。
UART2通信端口用于与冰箱系统控制板通信,以获取命令和运行状态信息。此端口 由两个光耦合器隔离。
方波接收器端口提供了另一种从主控制板接收速度命令的方法。此端口由一个光电 晶体管隔离。
图2-9给出了通信端口的位置。
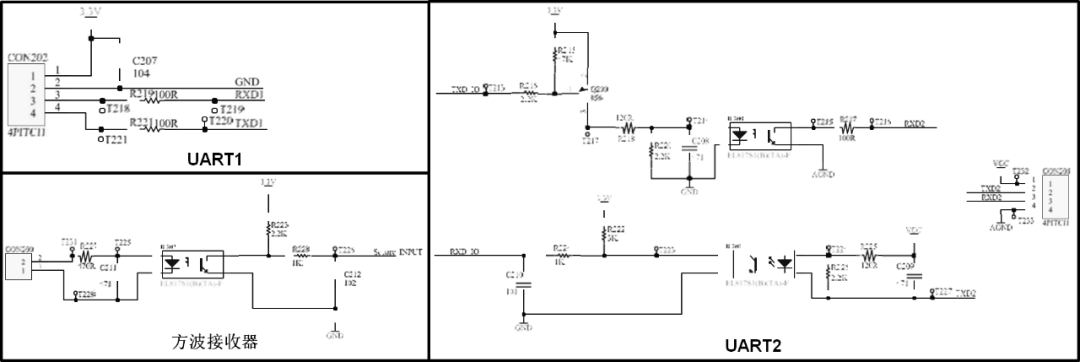
图2-9 通信端口
2.3 用户接口
2.3.1 连接器和插座
(1) 电源插座
交流电源插座(CON300)
压缩机的三相逆变器连接器(CON100)
(2) 信号插座
隔离式方波接收器插座(CON200)
隔离式UART2通信插座(CON201)
非隔离式UART1通信插座(CON202)
PICkit 3/PICkit 4在线调试器插座(CON203)
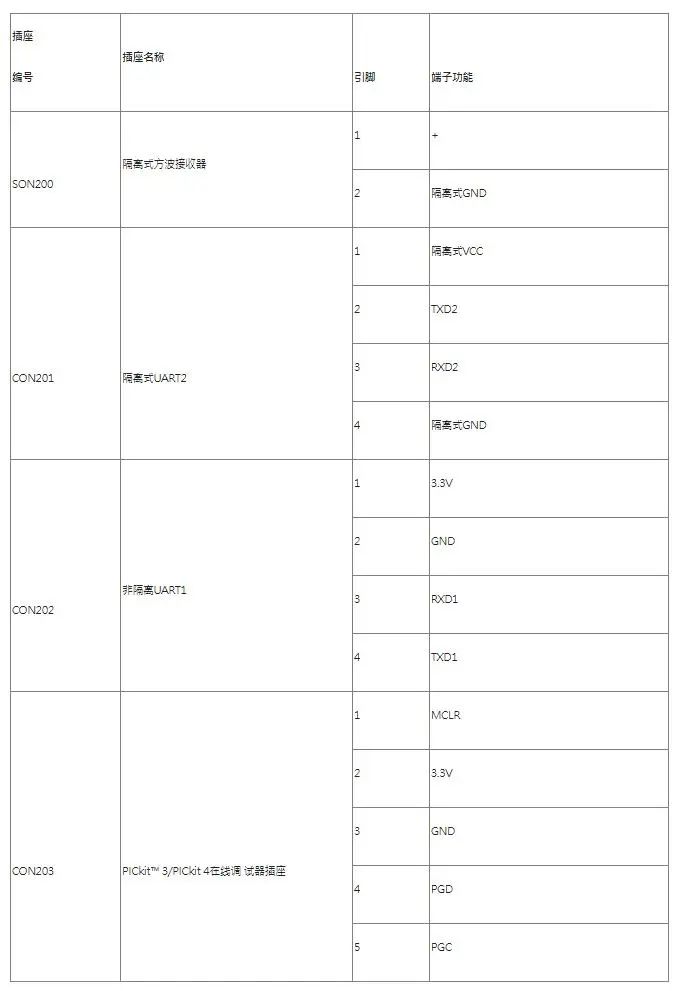
UART插座有4个端子。方波插座有2个端子。调试器插座有5个端子。表2-3列出了每个端子 的功能。
表2-3 信号插座的端子功能
所有插座的位置均可在图2-10中找到。

图2-10 所有插座和LED指示灯
2.3.2 LED指示灯
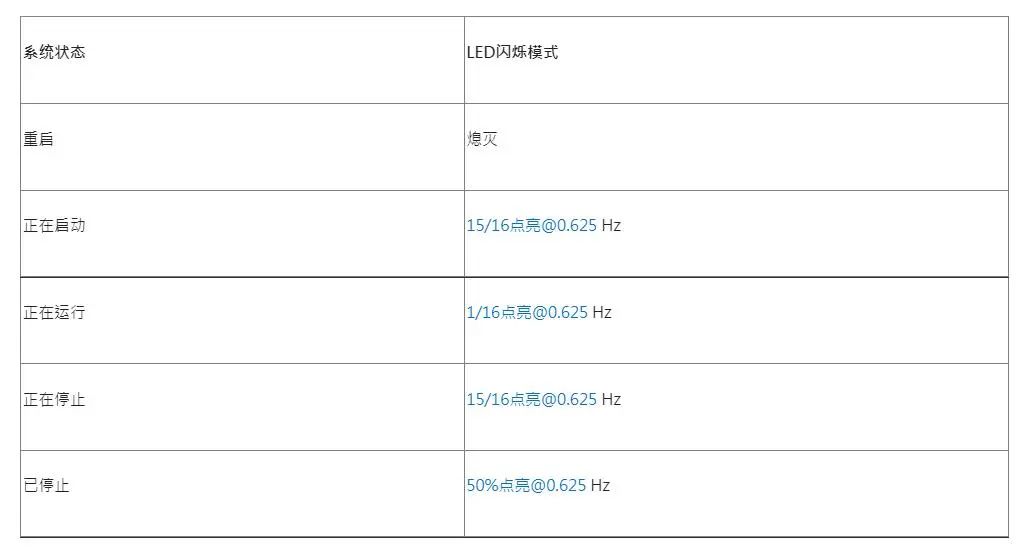
开发板上有两个LED指示灯。图2-10中给出了两个LED的位置。LD300指示3.3V电源轨是否可用。当3.3V电源轨就绪时,此LED点亮。LD200指示开发板的运行状态和错误消息。开发板上电后,此LED始终闪烁。客户可通过 LED闪烁获得运行信息。当RCDB按预期运行(例如压缩机正常运行)时,下表列出了其所 有可能的运行状态。
表2-4 运行状态LED闪烁模式
如果驱动压缩机的开发板处于故障状态,则LED将按以下错误代码形式闪烁。
表2-5 LED闪烁模式错误代码

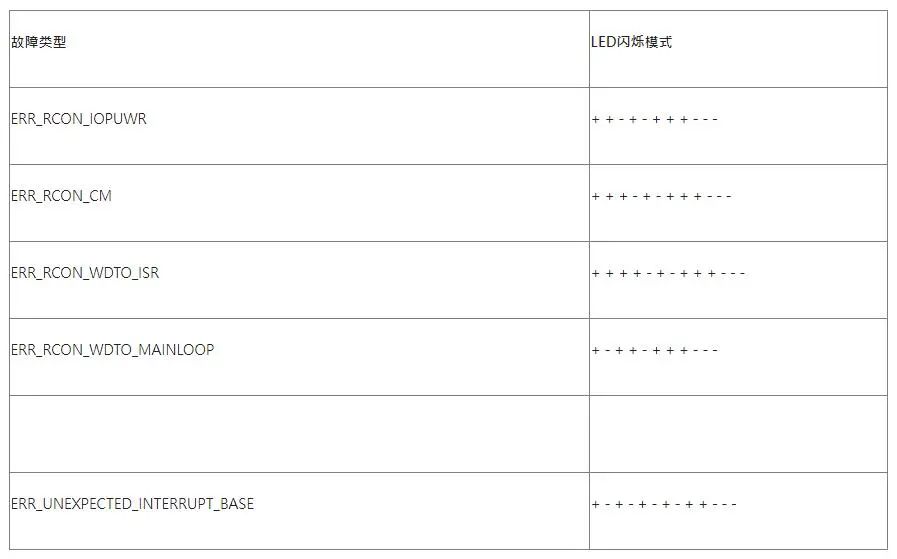
在上表中,“+”表示LED以50%占空比 @ 1.67Hz闪烁一次。“-”表示LED在1.67 Hz的 整个周期内熄灭。
2.4 电气规范
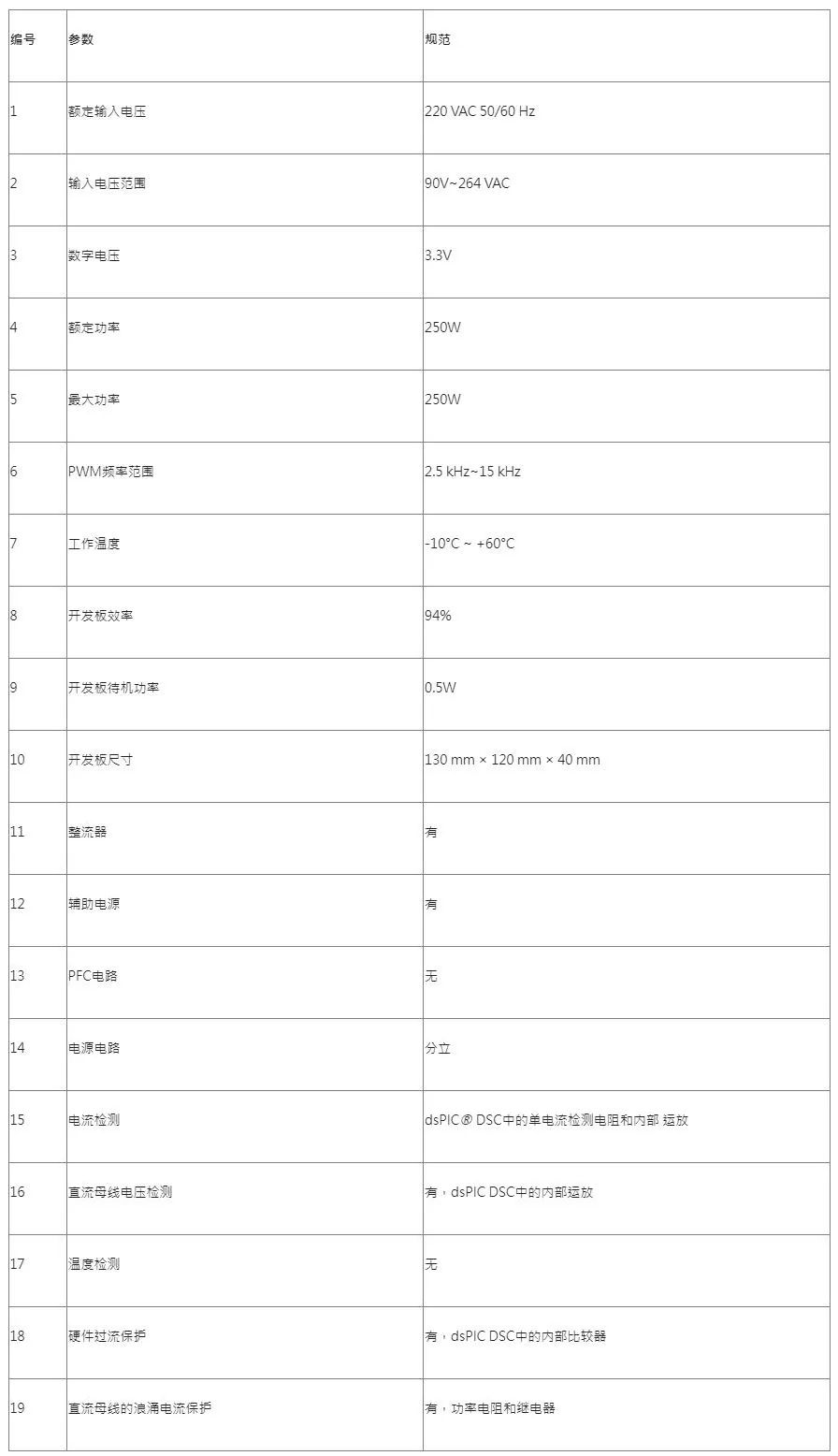
下表列出了RCDB开发板的电气规范:
表2-6 RCDB开发板的电气规范
3 设置和运行
RCDRD的软件已针对基本操作进行了配置。本章介绍如何设置软件、运行压缩机和调试 代码。
3.1 基本操作
基本操作包括打开软件项目、配置和编译代码,以及对开发板上的芯片进行编程。
(1) 启动MPLAB X IDE V5.10,然后打开项目“RCDRD_V1.0.X”。
注:此项目需要MPLAB X IDE V5.10或更高版本。

(2) 在左侧名为“Project”(项目)的选项卡上右键单击此项目,选择最后一项“Properties”(属性)。
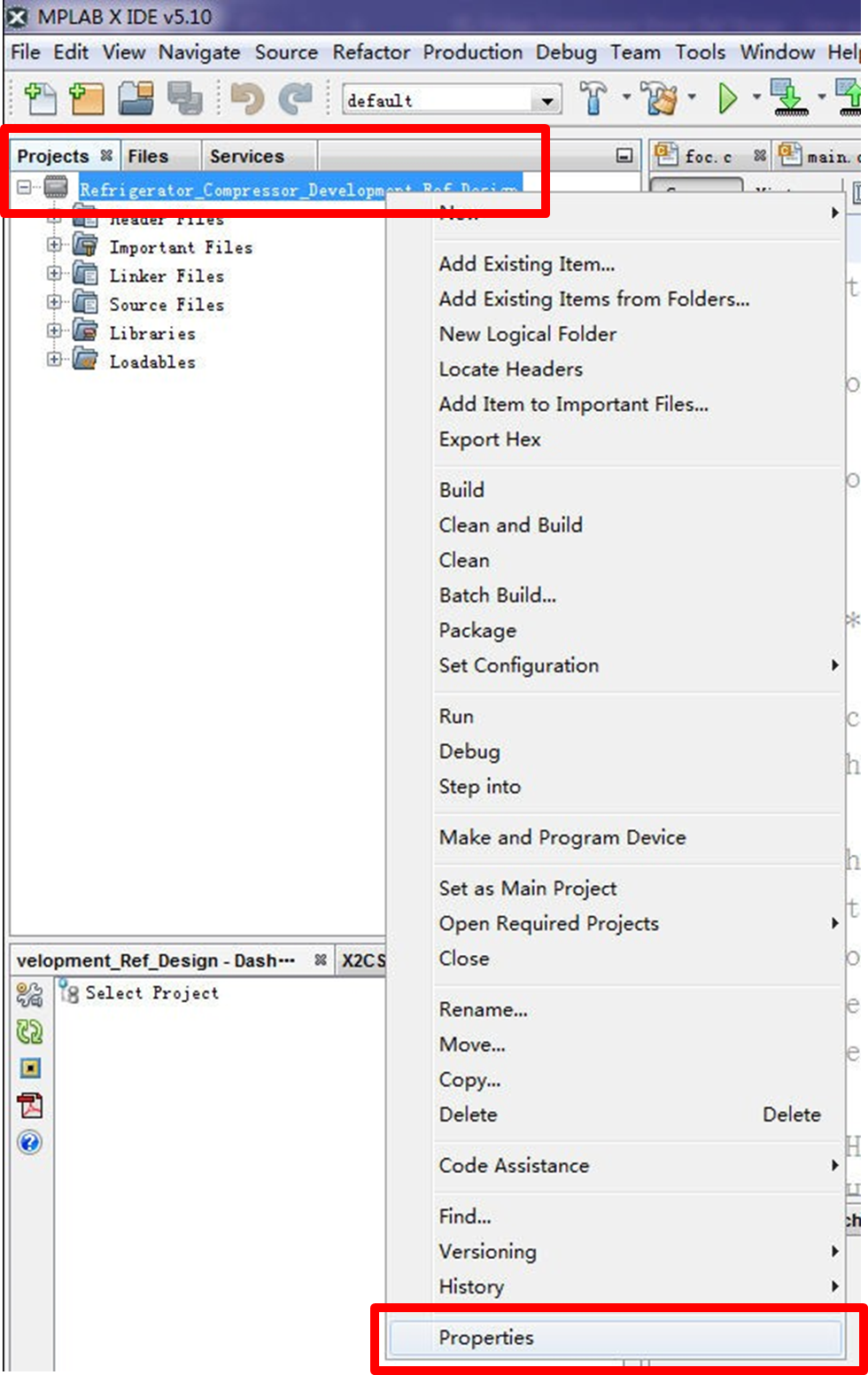
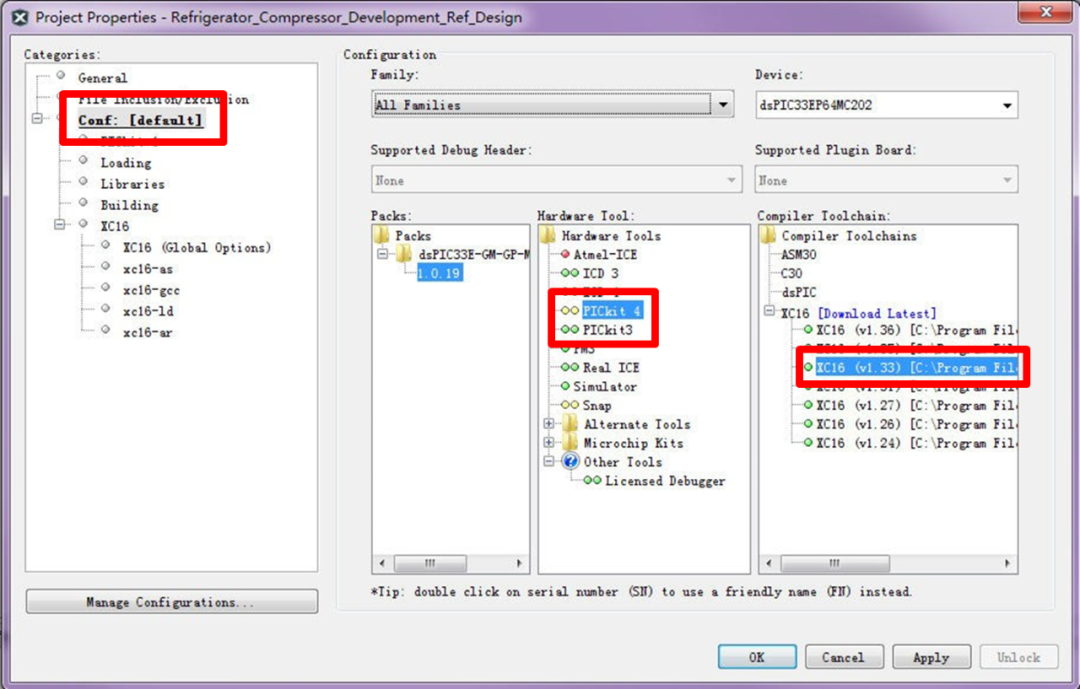
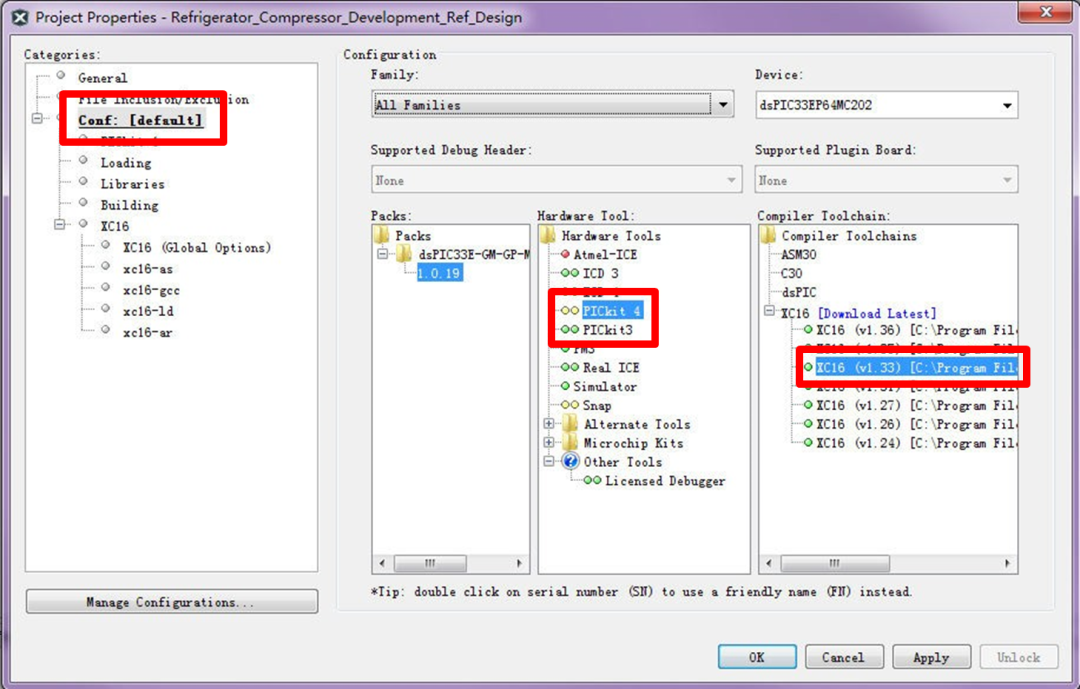
在“Project Properties”(项目属性)页面上,可以在“Hardware Tool”(硬件工 具)部分选择编程器/调试器,并且在“Compiler toolchain”(编译器工具链)部分选 择编译器(XC16 V1.33或更高版本)。将编程器/调试器连接到计算机后,即可在Hardware Tools(硬件工具)列表中找到“PICkit 3”/“PICkit 4”项。单击“Apply”(应用),应用选择。
(3) RCDB开发板采用热地线设计。当它与任何其他非隔离工具和设备(例如计算机和示波 器等)连接时,禁止为其供电。建议使用编程器/调试器对芯片进行编程,因为编程器/ 调试器可以为开发板提供3.3V电压来进行编程。
应用编程器/调试器选择(PICkit 3/PICkit 4)后,可以在“Project Properties”窗口的 “Categories”(类别)列表中找到“PICkit 3”/“PICkit 4”项。在“PICkit 3”/“PICkit 4”页面上的“Option categories”(选项类别)中,选择“Power”(电源)项。选中“Power target circuit from PICkit 3”(通过PICkit 3为目标电路供电)项, 然后为“Voltage level”(电压值)项选择“3.25”。单击“OK”(确定),应用选择。
(4) 单击工具栏或“Production”(生产)菜单中的“Clean and Build Project”(清除并编 译项目)按钮,编译代码。
(5) 成功编译之后,将PICkit 3/PICkit 4连接到RCDB CON203。
单击工具栏上的“Make and Program”(编译并编程)按钮,将代码下载到芯片中。

注:在执行此步骤之前,请确保交流电源已断开与开发板的连接。
(6) 断开PICkit 3与开发板的连接。确保RCDB未与任何其他非隔离开发板或设备连接。
(7) 在CON100上连接压缩机或电机,在CON300上连接交流电源。为开发板上电。开发板 现在处于“已停止”状态,LED会以50%占空比@0.625 Hz闪烁。

3.2 使用诊断内核运行
就RCDRD原型1而言,运行压缩机的唯一方法是使用代码中的诊断内核功能。与诊断内核 功能配合使用的工具是X2C Scope 插件和MCP2200 隔离式 USB 转 UART 演示板。X2C Scope是MPLAB X IDE的插件,用于简化调试工作。它能够提供通过UART在dsPIC数据存 储器中读写变量的完整功能,还可以在实时模式下绘制这些变量。
(1) 安装X2C Scope插件。从“Tools”(工具)菜单中选择“Plugins”(插件)项。在 “Downloaded”(已下载)页面上,单击“Add Plugins...”(添加插件...)按钮,选择 “at-lcm-x2c-mplabscope.nbm”文件。单击“Install”(安装),安装X2C Scope插件。
(2) 打开project properties(如3.1(2)中所示),在“Loading”(装入)页面的生产编译期 间使能“Load symbols when programming or building for production (slows process)”(为生产进行编程或编译时装入符号(减慢过程))。
(3) 通过杜邦线将MCP2200隔离式USB转UART演示板连接到计算机和RCDB。
(4) 将代码下载到驱动板(如3.1(4)(5)(6)中所述),断开所有非隔离器件的连接。注:每次开发板掉电和上电时均需要下载代码,以将X2C Scope连接到板上MCU。
(5) 断开编程器/调试器的连接,然后为开发板上电。
(6) 从“Tools”菜单上的“Embedded”(已安装工具)中单击“X2CScope”,启动X2C Scope。“X2C Scope Configuration”(X2C Scope配置)窗口将打开。
(7) 按下图所示设置参数,在“Select Project”(选择项目)按钮中选择此RCDRD项目。然后单击“Disconne...”(断开...)按钮,将计算机连接到驱动板。
(8)在“Project Setup”(项目设置)页面上,“Scope Sampletime”(示波器采样时 间)用于配置将在示波器时间轴中显示的采样时间间隔,其值必须与PWM周期相同。在RCDRD中,该值为400 μs(5 kHz)。“X2C Scope Watch”(X2C Scope观察) 窗口中的“Watch Sampletime”(观察采样时间)用于配置刷新时间间隔,其值应大 于PWM周期。单击“Set Values”(设置值),应用设置。
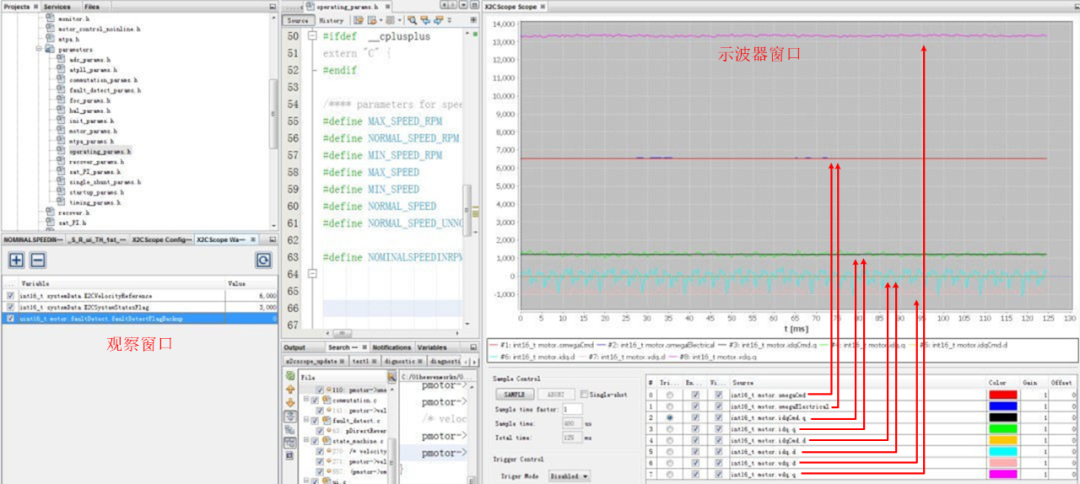
(9) 在“Data Views”(数据视图)页面上,单击“Open Scope View”(打开示波器视 图),打开“X2C Scope Scope”(X2C Scope示波器)窗口。此窗口用于显示变量的 波形。单击“Open Watch View”(打开观察视图),打开“X2C Scope Watch”窗 口。此窗口用于显示和更改变量值。这两个窗口中只能添加全局变量。
例如,下图的“X2C Scope Watch”窗口中选择了systemData.X2CVelocityReference、 systemData.X2CSystemStatesFlag 和 motor.faultDetect.faultDetectFlagBackup 这三个 变量。变量 systemData.X2CVelocityReference 是压缩机电 机的参考电 磁速度(以 RPM 为单 位)。变 量 systemData.X2CSystemStatesFlag 是系统状 态标志。变量 motor.faultDetect.faultDetectFlagBackup是故障标志。有关标志的更多详细信息,请参 见附录A. 标志说明。另外,也可以添加其他关注的变量。
(10) 在“X2C Scope Scope”窗口中添加要观察的变量。例如,添加参考速度和反馈速 度、参考id/iq和检测到的id/iq以及输出vd/vq等。单击“SAMPLE”(采样)按钮,开始 采样变量并显示波形。
(11) 使用大于最小速度的数据配置参考速度变量systemData.X2CVelocityReference。压缩 机将开始运行。Scope(示波器)窗口将实时显示变量波形。
(12) 操作结束时,切记单击“Connected”(已连接)按钮,断开X2C Scope与开发板的 连接。
(13) 有关X2C Scope的更多详细信息,请参见文件“X2CScope Documentation”。
3.3 通过测试用具进行调试和测试
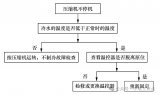
FDCRD提供了一个测试用具组件,可用于轻松修改换相和电机控制环的控制工作模式。它 代表几个运行时参数,这些参数用于将系统置于某些测试模式。通过结合电机控制应用中
使用的其他可调参数,可以调试和测试压缩机及开发板以确保其正常运行。它与换相和电 机控制环紧密耦合,如下图所示。
3.3.1 通过测试用具进行调试和测试操作
在“X2C Scope Watch”窗口中,可以设置所有调试和测试操作。
(1) 启动测试模式
设置密钥会使控制系统进入测试模式。否则,所有其他测试用具功能将不可用。
启动操作:
设置systemData.testing.key = TEST_GUARD_VALID = 53670。
停止操作:
设置testing.key != TEST_GUARD_VALID != 53670。
(2) 直接设置Vd和Vq 旁路速度环和电流环,并向其输出Vd/Vq馈入设置值。它用于调试和测试SVPWM占空 比计算功能。此功能仅设置输出电压的幅值。
启动操作:
为motor.testing.overrideVdqCmd.d和testing.overrideVdqCmd.q设置适当的 值。这两个变量的值已归一化。
设置motor.testing.operatingMode = OM_FORCE_VOLTAGE_DQ = 1。设置的Vd和Vq可用。
停止操作:
设置testing.operatingMode = OM_DISABLED = 0。没有输出电压。
相关功能:
结合功能(5)中的电磁频率可设置输出电压频率。
结合功能(6)中的电磁角可设置电机相的输出电压。
(3) 直接设置idCmd和iqCmd
旁路速度环并使能电流环,然后直接向电流参考id/iq馈入设置值。它可用于执行调试和 测试电流环、调整PI参数以及校准电流采样等操作。此功能仅设置输出电流的幅值。
启动操作:
为testing.overrideIdqCmd.d和motor.testing.overrideIdqCmd.q设置适当的值。请注意,这两个变量的值已归一化。
设置testing.operatingMode = OM_FORCE_VOLTAGE_DQ = 2。随后,Id和 Iq将按照我们的设置进行输出。
停止操作:
设置testing.operatingMode = OM_DISABLED = 0。没有输出电流。
相关功能:
结合功能(5)中的电磁频率可设置输出电流频率。
结合功能(6)中的电磁角可设置电机相的输出电流。
(4) 直接设置参考速度 直接在FOC操作中设置参考速度,忽略原始参考速度。它用于调试和测试速度环并调整 PI参数。
启动操作:
设置testing.operatingMode = OM_NORMAL = 3。
为testing.overrideOmegaElectrical设置适当的值。请注意,变量是电磁速 度,单位为RPM。
设置testing.overrides = TEST_OVERRIDE_VELOCITY_COMMAND = 1。
启动系统。启动周期后,驱动器将以设置的参考速度旋转电机。
停止操作:
设置testing.overrides = 0。原始速度顺序可用。
(5) 直接设置电磁频率
直接在换相组件中设置电磁频率,忽略估算的电磁角。将此功能与功能(2)/功能(3)结合 使用,可设置输出电压/电流的频率。如果将频率设置为0,则输出电压/电流为直流。
启动操作:
为testing.overrideCommutationFrequency设置适当的值。请注意,变量是FOC的电磁频率,单位为Hz。
设置testing.overrides = TEST_OVERRIDE_COMMUTATION = 2。
设置功能(2)或功能(3)。
停止操作:
设置motor.testing.overrides = 0。估算的频率可用。请注意,仍存在由功能(2)或功 能(3)设置的输出电压或电流。
(6) 设置电磁角 直接在换相组件中设置电磁角,忽略估算的电磁角。将此功能与功能(2)/功能(3)结合使 用,可将电机相电压/电流控制为设置值。
启动操作:
为testing.overrideThetaElectrical设置适当的值。请注意,该变量是FOC的电 磁角,单位已归一化。
设置testing.overrides = TEST_OVERRIDE_COMMUTATION = 4。
设置功能(2)或功能(3)。
停止操作:
设置motor.testing.overrides = 0。估算的电磁角可用。请注意,仍存在由功能(2)或 功能(3)设置的输出电压或电流。
(7) 时间戳
16位时间戳数组是测试用具状态结构体的一部分。这些时间戳记录在各个位置中,以通过 实时诊断工具对主控制过程进行性能分析。时间戳使用以系统时钟速率(Fcy = 70 MHz) 运行的定时器1,因此定时器值指示经过的系统时钟时间。时间戳数组变量的说明:
testing.timestamps[0]:状态机启动前的执行时间
motor.testing.timestamps[1]:与状态无关的所有关键任务的执行时间。
testing.timestamps[2]:确定下一个状态的执行时间。
motor.testing.timestamps[3]:更新状态并在该状态下执行适当操作的执行时间。
motor.testing.timestamps[4]:与状态无关的所有非关键任务的执行时间。
motor.testing.timestamps[7]:包括UI、监视器和看门狗等在内的其他过程的执行 时间。
操作: 在X2C Scope中添加时间戳数组变量。
3.3.2 测试用具设置的简要汇总
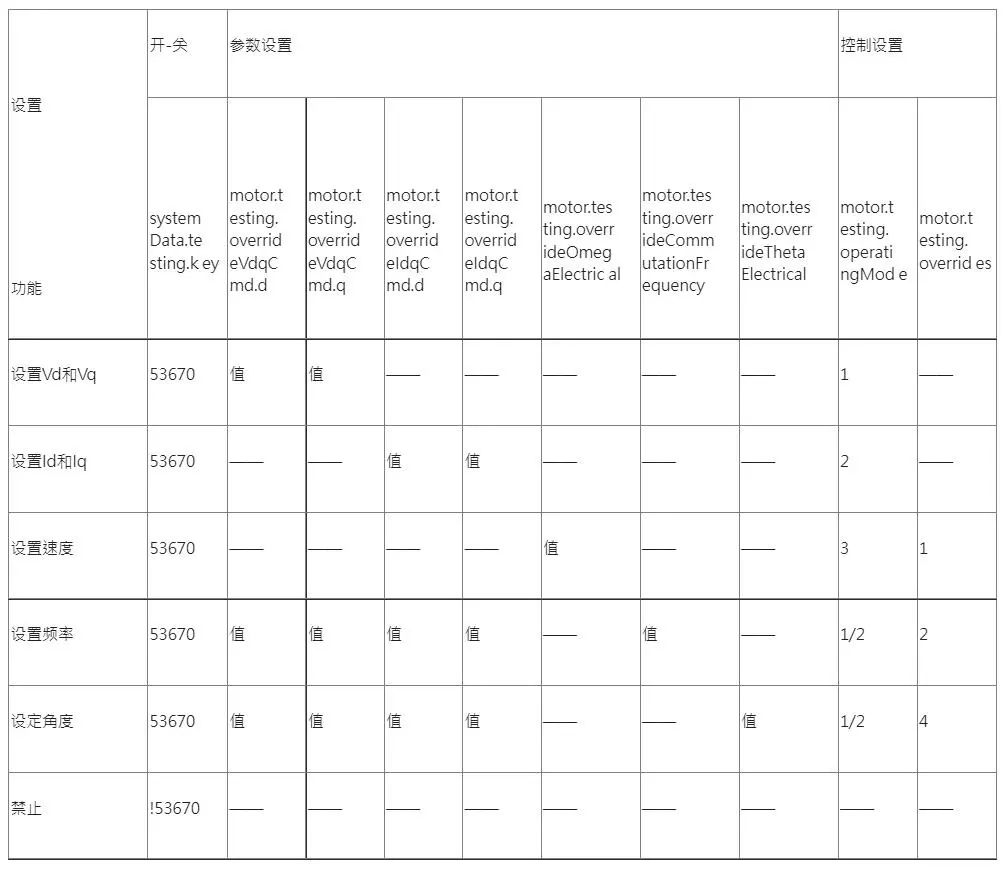
下表中汇总了测试用具的功能和设置:
表3-1 测试用具功能和设置的简要汇总
4 运行其他压缩机
电机控制是一种极其依赖电机和应用程序的系统。每当机制发生变革时,压缩机电机控制 都会在可靠启动和不平衡负载方面带来更大的挑战。RCDRD旨在提供一种简单的方法来运 行其他部件编号的压缩机。本章介绍如何使用RCDRD来运行并非供开发人员用于调试和测 试的压缩机。要运行其他压缩机,需要修改某些参数以便与压缩机匹配。除了文件夹“hal”中的一个C 源文件“opamp_comparator.c”之外,所有需要修改的代码文件均为文件夹“parameters” 中的头文件。
4.1 修改理论算术参数
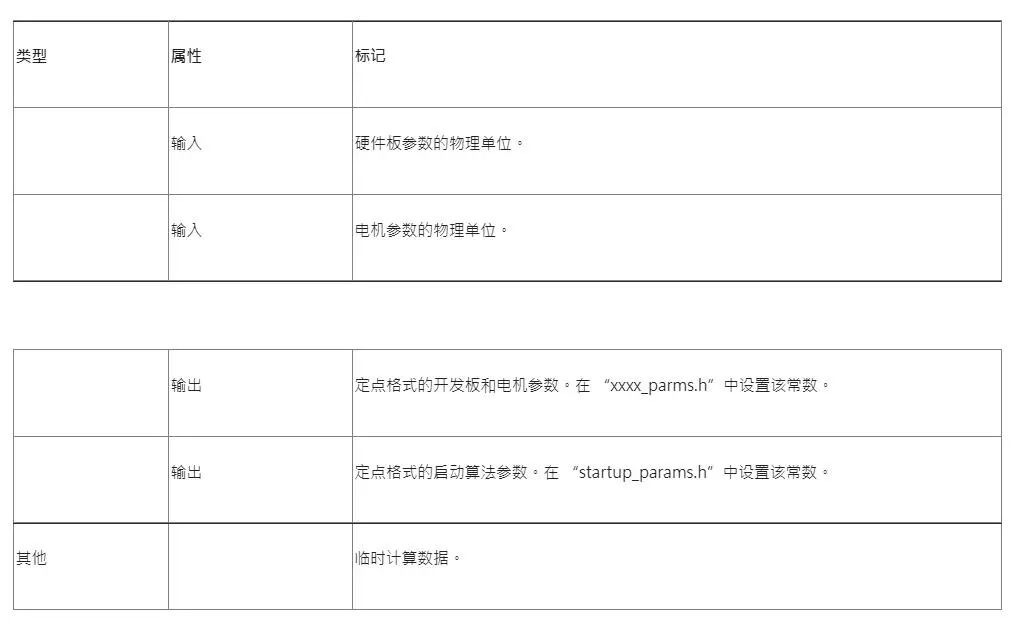
(1) 由于dsPIC是一种定点控制器,因此不能直接在代码中使用电机参数,因为它们是 小数数据。因此,我们 必须将物理 单位转换为 定点 PU 格 式(主要是 Q15 )。“tuning_params.xlsx”用于实现这种转换。“tuning_params.xlsx”文件中有多个参 数,具体说明如下。
表4-1“tuning_params.xlsx”中的参数类型
要获得定点参数,应按如下所示在“tuning_params.xlsx”中输入电机参数。
随后将在紫色背景单元格中生成定点格式的值。为避免Q15实现引起的饱和、分辨率损 失和截断错误,建议定点数据应处于6000-26000范围内。如果定点数据超出建议范围
(大于26000),则应调整换算值“Q”以符合建议范围。
在C源文件“hal/opamp_comparator.c”中的寄存器CVR(CVRCON<3:0>)中修改过 流阈值。
在头文件“parameters/atpll_params.h”中修改估算器角度跟踪锁相环(Angle Tracking Phase-Locked Loop,ATPLL)的参数。
在头文件“parameters/fault_detect_params.h”中修改停转检测的软件过流阈值。
在头文件“parameters/motor_params.h”中修改电机参数。
在头文件“parameters/mtpa_params.h”中修改最大转矩/电流(Maximum Torque per Ampere,MTPA)算法的参数。
在头文件“parameters/operating_params.h”中修改电机速度参数。
在头文件“parameters/sat_PI_params.h”中修改速度环的PI饱和阈值。
在头文件“parameters/startup_params.h”中修改启动算法的参数。
(10) 返回第3章“设置和运行”,编程并运行代码。
4.2 调试参数
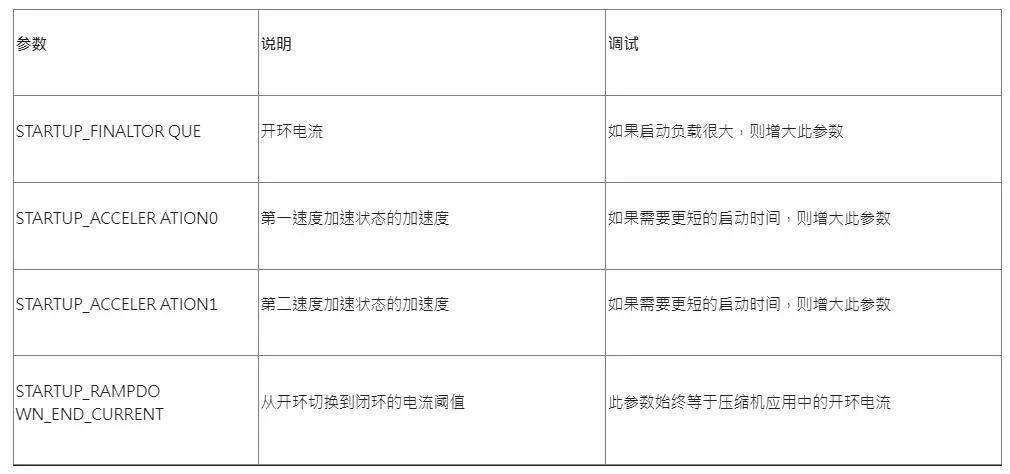
4.2.1 调试启动参数
RCDRD中的启动算法专用于压缩机应用。它不仅有助于改善启动可靠性,还能减少振动。所有启动算法参数均位于头文件“parameters/startup_params.h”中。更换压缩机时,需 要调试其中一些参数。
请参见表4-2“tuning_params.xlsx”的“启动算法参数”部分,“值”列是理论计算值, “归一化”列是归一化值。“修正”列是调试值,“修正归一化”列是归一化调试值。
表4-2“tuning_params.xlsx”的“启动算法参数”部分
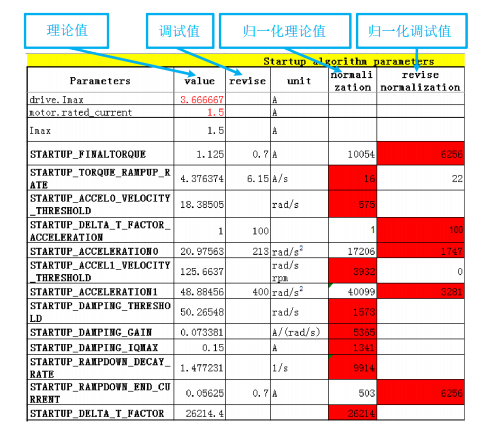
更换压缩机时,上表中只有几个参数需要微调,具体说明如下。
表4-3 启动的关键参数
4.2.2 调试PI参数
更换压缩机时,可能需要调整电流环和速度环的PI控制器参数。所有PI参数均位于头文件 “parameters/for_params.h”中。
Kxx_Q(KIP_Q、KII_Q、KWP_Q和KWI_Q)是换算值。将Kp和Ki乘以2^Kxx_Q可以得到 代码中使用的最终PI控制器数据。在调试工作的早期阶段,更改此换算值而不是Kp(Ki) 将有助于缩短调试时间,最终找到大致的Kp(Ki)值。
►场景应用图

►产品实体图
►展示板照片
►方案方块图
►核心技术优势
为内置永磁同步电机( Interior Permanent Magnet Synchronous Motor,IPMSM)和表面永磁同步电机(Surface Permanent Magnet Synchronous Motor,SPMSM)压缩机提供一种极具竞争力的无传感器控制解决方案,兼具硬件和软件。
PMSM电机效率更高、噪声更低。
优良的EMI滤波和保护电路。
可以由单个芯片同时控制冰箱系统和压缩机。
方便易用的软件开发环境。
►方案规格
使用dsPIC数字信号控制器(Digital Signal Controller,DSC) 实现PMSM压缩机控制。
额定连续输出电流为0.65A(RMS)。
室温环境下以187V至264V单相输入电压运行时,最高可达约250W的连续输出功率。
对于压缩机的瞬时高压操作,峰值输出功率为 350W。
-
压缩机
+关注
关注
11文章
673浏览量
79294
发布评论请先 登录
相关推荐
小身材,大能量!精密空调涡旋式压缩机大显身手

基于安森美ASPM27模块的汽车电动压缩机解决方案
压缩机保养小妙招

涡旋压缩机,机房空调的最佳伴侣!
冰箱压缩机控制方案介绍

汽车电动压缩机如何应对高压化挑战?






 工商网监
工商网监
评论