 4525DO-DS5AI001DP差压传感器 空速测量
4525DO-DS5AI001DP差压传感器 空速测量
大家好,我是【广州工控传感★科技】4525DO-DS5AI001DP空速传感器事业部,张工。
前言:飞机支持使用4525DO-DS5AI001DP空速传感器,这有助于在有风的条件下、慢速飞行和自主着陆。但是,不建议不熟悉空速传感器运作的新用户使用它,因为它确实需要额外的调整并增加了一层控制设置。许多空速传感器对光敏感。除非确定所使用的特定传感器对光不敏感,否则为避免测量误差,传感器应避光。空速传感器一直是有人和无人驾驶航空的主要关注点。然而,几乎所有固定翼或车辆都依赖于它。4525DO-DS5AI001DP空速传感器具有非常低的偏移和高分辨率,重要的是,它不受长电缆引起的噪声和 APM 2.6 vwin 对空速传感器上比率度量输出偏移的影响。
4525DO-DS5AI001DP空速传感器是什么?
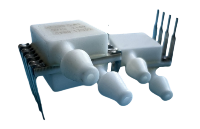
4525DO-DS5AI001DP空速传感器可通过测量无人机周围的正负压差来测量无人机相对于空气的速度。它们通常与皮托管和连接电缆一起提供,因为它需要额外的控制和调整层。通过皮托管测量压力,然后将其转换为空气速度。空气速度随空气压力的平方根而变化。吸入空气的皮托管通过橡胶管将其传输到传感器。
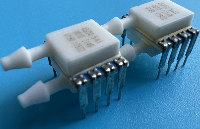
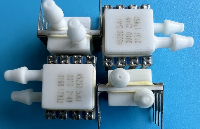
4525DO-DS5AI001DP空速传感器读数在初始化期间由自动驾驶仪自动归零,因此在有风的情况下,最好在皮托管上放置一个松散的接头盖,以保护前孔和四个小侧孔免受风的影响。此盖应在通电前安装并在飞行前取下。4525DO-DS5AI001DP空速传感器由一个皮托管、一个温度传感器和 2 个压力传感器组成。皮托管有2个端口(孔),一个在尖端(如注射针)称为动态端口,一个在侧面称为静态端口。这些端口中的每一个都连接到压力传感器。当管子在行驶中的车辆上指向前方时,它可以测量动、静端口的压力差。当考虑温度因素时,它可以估计通过空气的当前速度。
4525DO-DS5AI001DP空速传感器内部如何运作
高度环和空速环是分开的,如下图所示。基本上,油门和桨距是独立控制的,不耦合在控制回路中。当然,一个会影响另一个,但控制回路是独立的。空速由两个级联的比例积分 (PI) 回路控制。第一个回路用于调节地速,第二个回路用于调节空速。这样做只是为了确保如果地速低于某个值,空速将增加以进行补偿,以保持有效的 GPS 航向。如果机身设备中碰巧有一个 3 轴磁力计来获取航向值,则不需要保持一定的 GPS 速度来获取航向。
不正确的空速读数会引起很严重的事故,如果空速数据丢失,大多数车辆无人机将无法起飞或进入某种故障安全模式。但通常数据不会丢失,它只是不正确。如果读数不正确,它要么飞得太快,因此效率很低,要么飞得太慢,在许多情况下会坠毁。
空速读数不佳的另一个严重副作用是着陆。固定翼无人机通常装载到较大容量。这意味着他们需要以绝对较低速度飞行才能着陆而不会受到伤害。如果它们着陆太快,它们就会开始翻滚,通常会折断翅膀或更糟。固定翼无人机没有这个问题,但当读数不正确时,仍然会出现效率低下或危险的飞行行为。
-
传感器
+关注
关注
2550文章
51035浏览量
753047 -
压力传感器
+关注
关注
35文章
2212浏览量
163384
发布评论请先 登录
相关推荐
ADS1232对差阻式传感器进行测量数据跳动大是什么原因导致的?

ds18b20传感器的使用方法
压差传感器有什么作用
4525DO-TP3AJ030APF传感器在矿井气压测量中的应用
4525DO-DS3BS001DS传感器在差压变送器中的应用
差压表的技术演进与实际应用探讨
振动电阻式传感器测量模块的传感器接口
4525DO-DS3AI002DS空速模块的误差分析及结构分析
MS4525DO-DS3BI005DS空速传感器的测量原理





 工商网监
工商网监
评论