 置位/复位触发器的工作原理
置位/复位触发器的工作原理
SR:置位/复位触发器
说明
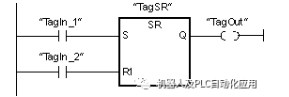
可以使用“置位复位触发器”指令,根据输入 S 和 R1 的信号状态,置位或复位指定操作数的位。如果输入 S 的信号状态为“1”且输入 R1 的信号状态为“0”,则将指定的操作数置位为“1”。如果输入 S 的信号状态为“0”且输入 R1 的信号状态为“1”,则将指定的操作数复位为“0”。
输入 R1 的优先级高于输入 S。输入 S 和 R1 的信号状态都为“1”时,指定操作数的信号状态将复位为“0”。
如果两个输入 S 和 R1 的信号状态都为“0”,则不会执行该指令。因此操作数的信号状态保持不变。
操作数的当前信号状态被传送到输出 Q,并可在此进行查询。
下表列出了“置位复位触发器”指令的参数:
| 参数 | 声明 | 数据类型 | 存储区 | 说明 | |
|---|---|---|---|---|---|
| S7-1200 | S7-1500 | ||||
| S | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L 或常量 | 使能置位 |
| R1 | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能复位 |
| <操作数> | InOut | BOOL | I、Q、M、D、L | I、Q、M、D、L | 待置位或复位的操作数。 |
| Q | Output | BOOL | I、Q、M、D、L | I、Q、M、D、L | 操作数的信号状态 |
示例
以下示例说明了该指令的工作原理:

满足下列条件时,将置位操作数“TagSR”和“TagOut”:
操作数“TagIn_1”的信号状态为“1”。
操作数“TagIn_2”的信号状态为“0”。
满足下列条件之一时,将复位操作数“TagSR”和“TagOut”:
操作数“TagIn_1”的信号状态为“0”,且操作数“TagIn_2”的信号状态为“1”。
操作数“TagIn_1”和“TagIn_2”的信号状态为“1”。
| RS:复位/置位触发器 |
说明
可以使用“复位置位触发器”指令,根据输入 R 和 S1 的信号状态,复位或置位指定操作数的位。如果输入 R 的信号状态为“1”,且输入 S1 的信号状态为“0”,则指定的操作数将复位为“0”。如果输入 R 的信号状态为“0”且输入 S1 的信号状态为“1”,则将指定的操作数置位为“1”。
输入 S1 的优先级高于输入 R。当输入 R 和 S1 的信号状态均为“1”时,将指定操作数的信号状态置位为“1”。
如果两个输入 R 和 S1 的信号状态都为“0”,则不会执行该指令。因此操作数的信号状态保持不变。
操作数的当前信号状态被传送到输出 Q,并可在此进行查询。
参数
下表列出了“复位置位触发器”指令的参数:
| 参数 | 声明 | 数据类型 | 存储区 | 说明 | |
|---|---|---|---|---|---|
| S7-1200 | S7-1500 | ||||
| R | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L 或常量 | 使能复位 |
| S1 | Input | BOOL | I、Q、M、D、L 或常量 | I、Q、M、D、L、T、C 或常量 | 使能置位 |
| <操作数> | InOut | BOOL | I、Q、M、D、L | I、Q、M、D、L | 待复位或置位的操作数。 |
| Q | Output | BOOL | I、Q、M、D、L | I、Q、M、D、L | 操作数的信号状态 |
示例
以下示例说明了该指令的工作原理:
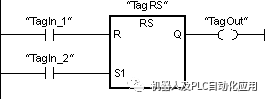
满足下列条件时,将复位操作数“TagRS”和“TagOut”:
操作数“TagIn_1”的信号状态为“1”。
操作数“TagIn_2”的信号状态为“0”。
满足下列条件之一时,将置位“TagRS”和“TagOut”操作数:
操作数“TagIn_1”的信号状态为“0”,且操作数“TagIn_2”的信号状态为“1”。
操作数“TagIn_1”和“TagIn_2”的信号状态为“1”。
审核编辑:汤梓红
-
西门子
+关注
关注
94文章
3034浏览量
115776 -
指令
+关注
关注
1文章
607浏览量
35692 -
触发器
+关注
关注
14文章
2000浏览量
61129 -
SR
+关注
关注
1文章
35浏览量
23410 -
复位
+关注
关注
0文章
171浏览量
24211
发布评论请先 登录
相关推荐
具有置位和复位功能的双 JK 触发器;正-边-触发-74HC_HCT109

具有置位和复位功能的双 JK 触发器;上升沿触发-74HC_HCT109_Q100





 工商网监
工商网监
评论