 自动驾驶汽车激光雷达传感器指南
自动驾驶汽车激光雷达传感器指南
几年后,你可能会召唤一辆自动驾驶汽车来接你,开车送你去上班。当您在旅途中赶上电子邮件或小睡时,您相信汽车的传感器和摄像头会安全准确地引导它到达目的地。
为了有效,自动驾驶汽车的能力必须超过人类驾驶员的能力。这怎么可能?这些车辆如何在光线、黑暗、恶劣天气条件下,以及在黑暗和恶劣的天气中进一步突破极限?建立可靠的自动驾驶能力需要设计一个结合各种传感器和计算的检测系统......一个比人类更能“看到”车辆环境的系统。
该系统设计多样性的关键在于不同的传感器类型、冗余和重叠传感器,以提高汽车的视觉精度。主要的自动驾驶汽车传感器是摄像头、雷达和 LiDAR(光成像、检测和测距)。通过技术融合电子设备,这些不同的传感器协同工作,通过检测视野中物体的形状、速度和距离,为汽车提供视觉的周围地图。单个传感器的技术融合大于每个传感器的总和。
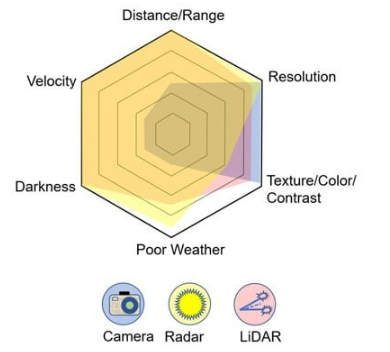
图1.自动驾驶汽车需要许多套“眼睛”,由摄像头、雷达和LiDAR传感器提供。
在图 1 中,摄像头(蓝色)通过“看到”所有彩色摄像头,给人类居住者一种自信的感觉。输入摄像头数据通过提供无与伦比的视觉细节来添加到自动驾驶汽车的地图中。雷达信号在恶劣天气下有效运行,增加了人类可能无法提供的维度。LiDAR 在短时间内使用光线并“看起来”并乘以反射。将所有三个数据输出结果与板载处理器相结合。
相机会说谎吗?
相机创建世界的视觉表示。自动驾驶汽车依靠前、后、左和右的摄像头,因此可以实现 360 度视图。一些相机具有较短距离的宽视野(120度)。其他人则专注于狭窄的视野,提供远程视觉效果。有些汽车有鱼眼摄像头,提供全景,可以全面了解车辆后面的情况。
虽然相机提供准确的视觉效果,但它们有其局限性。它们区分周围环境的细节;但是,距离确定需要两个维度才能开始计算确切位置。我想每辆车可以有两个摄像头,就像两只眼睛一样,专注于人类感兴趣的项目,但这可能是多余的和无效的,因为我们将为自动驾驶汽车的技术融合处理添加其他传感器。另一个严重的缺点是,基于摄像头的传感器很难在低能见度条件下检测物体,例如雨、雾或夜间。
雷达测绘
雷达传感器是对低能见度摄像机的补充。雷达从一开始就存在于飞机、气象编队和探测船只中。该技术以脉冲形式传输无线电波。一旦波浪击中物体,它们就会反弹并返回接收器。这提供了速度和位置对象数据。
雷达传感器也环绕着汽车,从各个角度检测物体。虽然这种传感器技术决定了速度和距离,但它无法区分不同的车辆类型。雷达和摄像头传感器共同提供的数据足以满足较低级别的自主性,但它们不能涵盖所有情况,也无法满足人类的体验。这就是我们需要激光雷达的原因。
使用激光雷达传感器对焦
LiDAR 是执行自动驾驶汽车距离传感的关键光学技术。LiDAR 传感器有助于完成画面。汽车应用的LiDAR性能高度依赖于光前端以及信号通过信号链传输然后处理的方式。
LiDAR 传感器通过脉冲激光和计算返回信号的时间来测量距离。LiDAR 为自动驾驶汽车提供 3D 视图。返回信号为周围的汽车和行人提供形状和深度。激光雷达与雷达一样,在弱光条件下工作。
为什么跨阻放大器对LiDAR至关重要
在LiDAR应用中,跨阻放大器(TIA)具有独特的带宽和噪声规格,是信号链的核心,能够精确检测固定或移动物体。有效的TIA必须具有足够宽的带宽,以捕获不同路况下的所有细节,噪声必须尽可能低,以避免使接收到的信号失真。
Maxim具有跨阻放大器(TIA1),当与雪崩光电二极管配合使用时,可以感测回光。信号通过比较器(COMP1)进一步调理。如图2所示,TIA2和COMP2提供了初始激光传输时间,该图描述了车辆的激光/接收器系统。该系统由多个光电二极管、一个激光二极管和支持电子设备组成,用于发送和接收光信号。
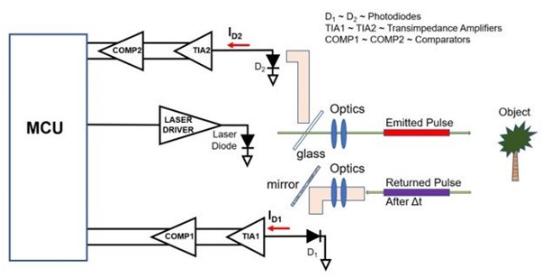
图2.带有TIA和COMP光接收器系统的LiDAR系统。
在图2中,激光驱动器启动向物体发射激光脉冲。激光传播到玻璃板上,玻璃板将激光信号反射回MCU,以确定初始传输时间并传递到发射器光学器件(指定透镜)。发射的脉冲到达物体并反射到D1、TIA1 接收器系统。一旦通过接收器光学器件和镜面反射,光线就会撞击InGaAs光电二极管(D1),一种高灵敏度半导体电子器件,光学灵敏度带宽为1310nm至1550nm。
D上即将来临的曙光1可能明亮或昏暗,具体取决于行驶的距离。此外,大气中可能存在污染物,为了混淆系统,可能存在干扰幻影灯。该 D图2将光转换为安培电流(ID1),在跨阻放大器 #2 (TIA1) 上移动。
TIA(MAX40660或MAX40661)和COMP(MAX40025或MAX40026)是LiDAR信号接收器电路的组成部分。MAX40660和MAX40661为TIA,用于LiDAR应用中的光测距接收器。
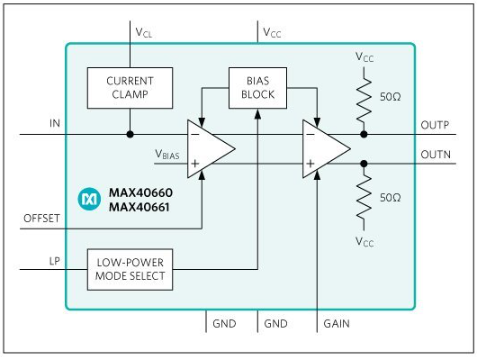
图3.MAX40660/MAX40661跨阻放大器(TIA1和TIA2),用于汽车激光雷达。
低噪声、高增益、低群延迟和从过载中快速恢复使这些 TIA 适合距离测量应用。重要特性包括:2.38pA输入参考噪声密度、内部输入箝位、引脚可选的25kΩ和50kΩ跨阻,MAX490具有40660MHz的宽带宽,输入电容为0.5pF,跨阻为25kΩ,MAX160具有40661pF输入电容的带宽为10MHz。
MAX40025和MAX40026为比较器(COMP),用于稳定TIA光信号。这些器件是高速比较器,典型传播延迟为280ps。
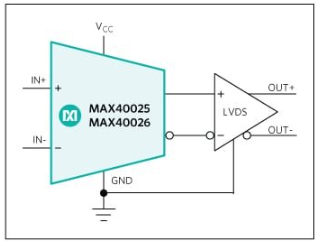
图4.MAX40025/MAX40026高速比较器(COMP1和COMP2),用于汽车激光雷达。
MAX40025封装采用1.218mm x 0.818mm、6焊球晶圆级封装(WLP),MAX40026采用2mm x 2mm 8引脚TDFN侧可润湿封装,符合AEC-Q100汽车认证要求。
总结
摄像头、雷达和激光雷达系统的技术融合为自动驾驶汽车创造了一个近乎人类的视觉系统。尽管这三个传感器提供不同的数据和信息,但自动驾驶汽车的计算能力将这三个视角融合在一起。本文特别关注光学前端操作,展示了LiDAR在三者中的强大参与者。突出显示的 LiDAR 就绪 TIA 和比较器提供了前所未有的系统精度水平。有了这种准确性,人们应该对自动驾驶汽车的能力更有信心,这些汽车可能很快就会让你的通勤更加高效或放松。
审核编辑:郭婷
-
传感器
+关注
关注
2550文章
51035浏览量
753048 -
自动驾驶
+关注
关注
784文章
13784浏览量
166373 -
LIDAR
+关注
关注
10文章
326浏览量
29410
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论