 大众版KUKA程序的区别
大众版KUKA程序的区别
一般的KUKA程序:
1 PTP P0
2 SPLINE
3 SPL P1
4 SPL P2
5 SPL P3
6 SPL P4
7 SCIRC P5, P6
8 SPL P7
9 SLIN P8
10 ENDSPLINE
而大众版的KUKA程序有很大的区别,它将真实的轨迹程序全都隐藏了你看到的只是一件外套.
程序外表基础编程表单:
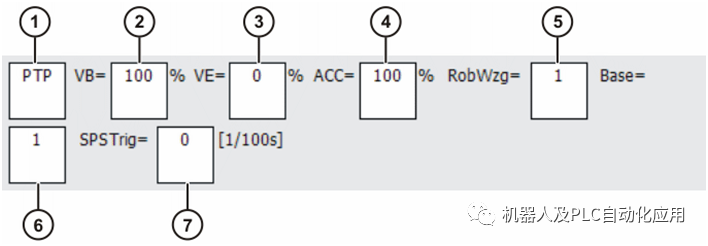
PTP VB=100% VE=0%ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s]P轨迹段
1: FB PSPS = EIN SPS条件程序

2: A23 = AUS
3: WARTEBIS !E16 & E23
4: Tech_ EZSP Zange =Nr1 ProgNr = 99 Offset = 0 [1/10 mm] Weg = 0 [1/10 mm] S-Punkt =3428 Fzg-Typ = 81 EIN ---------------用户程序
5: bin2 ( EIN ) = 103
6: WARTE BIS !E129 + E26
7: SPSMAKRO80 = EIN
8: WARTE BIS E23

9: A23 = EIN
10: FB PSPS = E42 & E44 & E45 & E46 &E49 & E80 & M30 & M95
实际程序:
VW_MPARA_ACT=P7_D 轨迹设置条件程序
DECL VW_MPARA_TYP P7_D={TOOL_NO 1,BASE_NO 1,VB 100,VE 0,ACC 100,TRG_TIME 5,MOVE_TYPE #PTP_MOTION}
Act_P1 =P7 轨迹坐标位置变量转存
Act_P2 =P7 轨迹坐标位置变量转存
DECL E6POS P7={X 450.032104,Y -206.769699,Z -16.95224,A -179.587296,B 81.4899063,C 85.0538025,S 6,T 59,E1 13.6000004,E2 0.0,E3 0.0,E4 0.0,E5 0.0,E6 0.0}
VW(#MPARA,TRUE) 执行轨迹所需要的一些设置如:加速度,逼近,BASE/TOOL
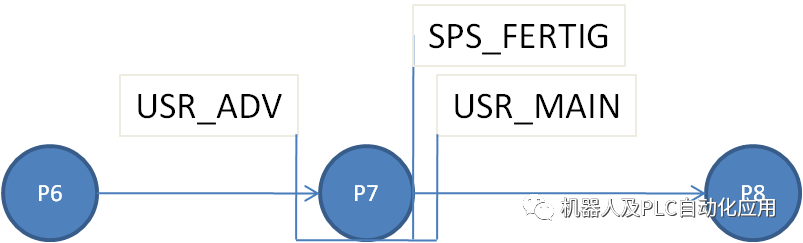
SPS_FERTIG=FALSE
TRIGGER WHENDISTANCE=1 DELAY=-50 DO SPS_TRIG(7) PRIO=-1激活执行SPS程序提前0.05S
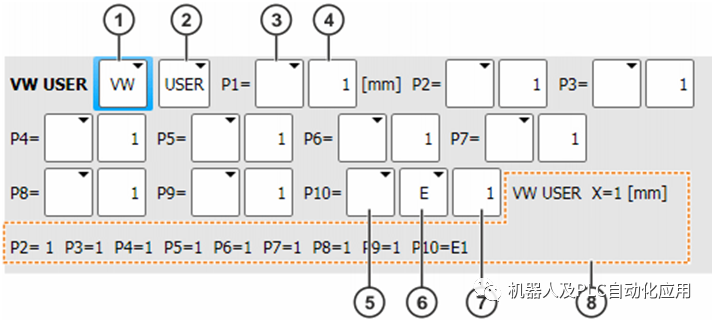
VW_USR_R(#USR_ADV,101,10,99,0,0,3428,81,TRUE) 预执行用户程序
IF (($PRO_MODE==#GO)OR($EXT)) THEN偏差计算
CONTINUE
act_P1.E1=(act_P1.E1-(MyCorrValue*SZ1_Z1_AHV))
MyTest=act_P1.E1
ENDIF
IF (VW_MPARA_ACT.MOVE_TYPE==#PTP_MOTION) THEN
CONTINUE
PTP act_P1 预执行轨迹程序
PTP P7 执行PTP轨迹程序
$ADVANCE=1
WAIT FORSPS_FERTIG 不是过渡步
VW_USER (#USR_MAIN,101,10,99,0,0,3428,81,TRUE)执行P7步后的用户程序
IF (($PRO_MODE==#GO) OR ($EXT)) THEN
Weg=PAR4 远离的补偿量
MyCorrWeg=$NULLFRAME变量归零
MyCorrWeg.X=-(Weg*0.1)
IF (Weg>9) THEN远离值大于9执行轨迹偏移
PTP $Pos_act:MyCorrWeg C_PTP 执行轨迹后
ENDIF
ENDIF
- 程序
+关注
关注
114文章
3694浏览量
80256 - 大众
+关注
关注
1文章
776浏览量
33881 - KUKA
+关注
关注
3文章
216浏览量
16383
原文标题:KUKA 大众版本 轨迹程序分解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
KUKA库卡机器人伺服驱动器相关型号举例
星际多媒体信息发布系统大众版V3.102大众版V3.1
星际电信营业厅多媒体信息发布系统大众版V3.102大众版
星际多媒体信息发布系统大众版V3.102大众版V3.1
星际电信营业厅多媒体信息发布系统大众版V3.102大众版
星际多媒体信息发布软件大众版V3.102大众版V3.1
KUKA程序中"DEF "与" DEFFCT" 的区别
大众USER(技术包)的整体调用和结构!






 工商网监
工商网监
评论