 六轴机器人结构设计 传统六轴机器人的基本构成
六轴机器人结构设计 传统六轴机器人的基本构成
传统关节机器人主要由本体结构件、减速器、伺服电机、控制器等构成。
本体结构件
工业机器人本体由旋转机座,大臂,小臂等部位组成,是机器人外面最直接的机械结构。机器人本体结构件包含铸铁、铸钢、铸铝、结构钢等多种材质。
减速器
减速器用于承载机器人各个关节的载荷,电机输出的高转速低扭矩通过减速器后形成低转速高转矩,从而提升机器人各轴的输出力矩,使得机器人可以承受较大的负载。机器人对减速器的要求很高,需要减速器体积小、质量小、减速比大、精度高、抗冲击等。
目前大量应用于多关节机器人的减速器主要有两种:一种是RV减速器,另一种是谐波减速器。RV减速器因具有更高的刚度和回转精度,一般被放置在大臂、肩部等重负载位置;谐波减速器则被放置在小臂及手腕部。
驱动控制系统
驱动控制系统主要用于控制机器人按照设定的运动参数进行运动。其主要包含伺服驱动器、伺服电机和控制器。
(1)伺服电机主要用于驱动机器人的关节,要求具备最大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围;
(2)伺服驱动器是驱动伺服电机进行运动的装置,根据控制器的指令,伺服驱动器给予伺服电机相应的电流,从而保证伺服电机按照需求的运动速度、加速度、运转位置等条件进行运动,从保证机械臂的运动达到设定要求。
(3)控制器可对其内部参数进行人工设定而实现对机器人的位置控制、速度控制和转矩控制等多种功能。
六轴串联机器人“轴”作用
传统六轴工业机器人一般有6个自由度,常见的包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)。6个关节合成实现末端的6自由度动作。
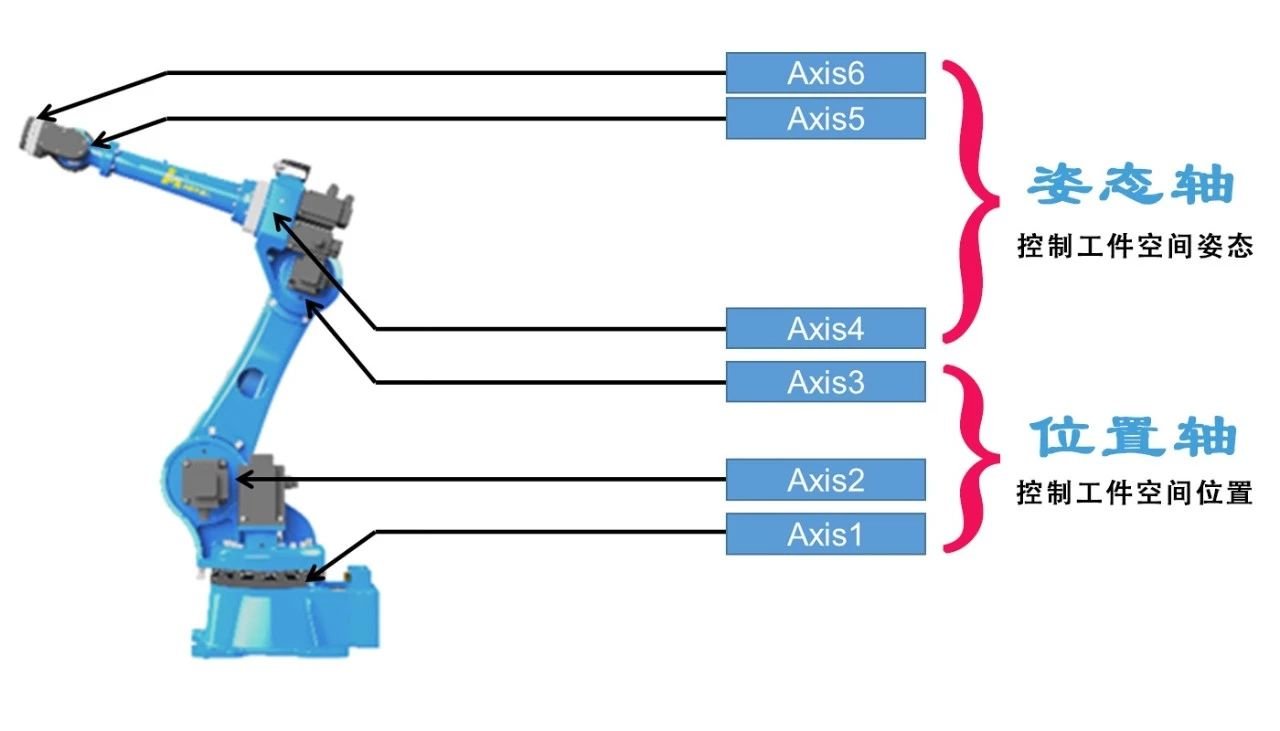
一轴:第一个轴是连接底座的部分,承载着整个机器人的重量和和底座的左右转动;
二轴:控制机器人大臂的前后摆动;
三轴:控制机器人小臂的前后摆动;
四轴:控制机器人小臂旋转;
五轴:控制和上下微调机械手手腕的转动,通常是当产品抓取后可以进行产品翻转的动作;
六轴:用于末端夹具部分的旋转功能,可更精确定位到产品。
Tips
根据应用场景不同,手腕部分也有不同的结构设计方式。B(bend)表示弯曲结构,R(revolve)表示转动结构。

六轴串联机器人优劣势
优势
结构紧凑,安装占地面积小;
灵活性好,手部到达位置范围大,具有较好的避障性能;
没有移动关节,关节密封性能好,摩擦小,惯量小;
关节驱动力小,能耗较低。
劣势
运动过程中存在平衡问题,控制存在耦合;
当大臂和小臂舒展开时,机器人结构刚度较差;
控制运动过程中存在奇异点,使用及控制算法需规避。
责任编辑:彭菁
-
工业机器人
+关注
关注
91文章
3360浏览量
92622 -
减速器
+关注
关注
7文章
393浏览量
23244 -
六轴机器人
+关注
关注
0文章
42浏览量
4404
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
stm32红外六足机器人
六轴机器人是哪六个轴
焊接机器人六个轴分别是什么作用






 工商网监
工商网监
评论