 三角法测距原理
三角法测距原理
激光雷达根据原理可以分为TOF(飞行时间),三角法测距和相位测距三种方式。
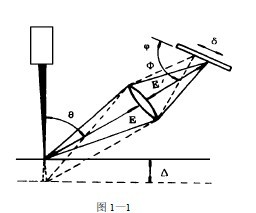
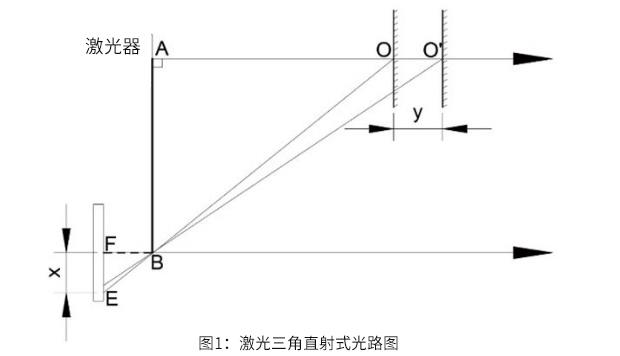
三角法测距为
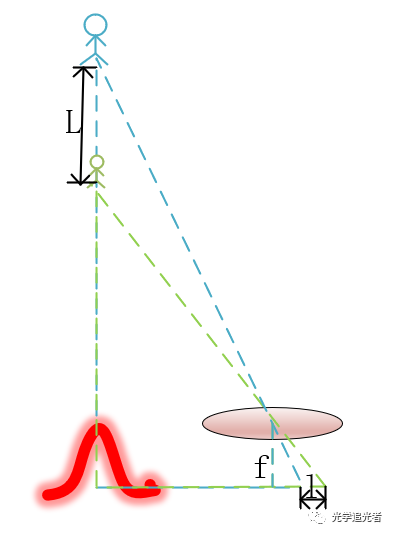
三角测距法是利用相似三角形本地可以测得透镜中心和照射到CMOS/CCD上的距离,就可以得到物距,本地的分辨率l决定了探测物体的分辨率。因此当物距越大,探测精度越低。因此该方法测距较短且需要大面积的光电探测器。
TOF为目前大多数的自动驾驶采用的雷达方案,通过发射脉冲激光,计算脉冲激光经过目标并反射回探测器的时间,即飞行时间。飞行时间等于脉冲数n和脉冲间隔t的乘积,距离就等于飞行时间和速度的乘积,如下面公式所示,f为脉冲频率。
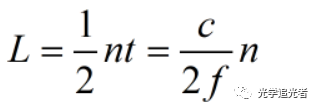
这种方式简单直接,测距的精度不随距离增加而恶化,但是由于光速快,短距下对器件的响应时间要求高。
TOF另一种精度更高的测距方式为测量调制信号和初始信号的相位差。对激光器发出的光进行幅度调制,调制信号经过反射后进行探测,检测该回波信号的相位和原始相位差,根据已知的调制信号的角频率即可获得距离
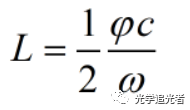
由于相位检测只能在一个2pi区间内,因此测距存在不准确性,为了提高测距的准确度,需要使用不同角频率的调制信号多次测量,测量效率低。
FMCW为Frequency modulated continuous wave,即调频连续波,从名字就可知在测距过程中发射的频率是变化且在时间上连续的。
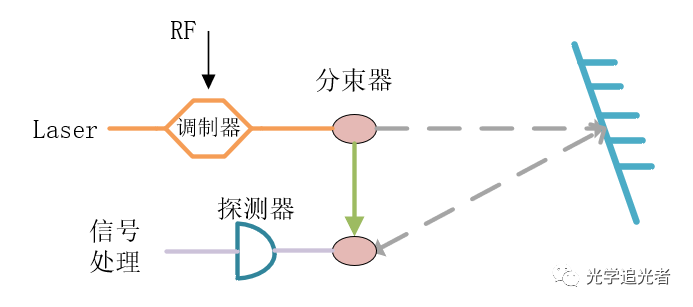
上图为相干探测过程。RF信号频率在一定范围内改变,通常为三角波或者锯齿波。调制器将RF信号调制到光频域上,输出的频率范围假设为f1和f2,三角波周期为T,则输出频率为
分束器分出一部分光用作参考光,剩余部分经过放大器向空间发射,经过物体表面反射回来,和参考光合束后在PD中拍频。通常受限于带宽,和频被滤掉,剩余差频以及相位关系。

差频与回波信号相对于参考信号的延时有关。从上述公式以及相位测距的公式对比,可以发现FMCW就是通过将相位差转化为频率差严格的测出相位差(延时),而探测器很容易测出差频的频率。FMCW的优势明显,测量精度高,抗干扰能力强,同时也可以测速度,拍频后频率低,易于信号处理,而且不像脉冲激光器需要高功率打出去,FMCW的峰值功率为百mW量级,比TOF低四个数量级,比较安全。
目前能够提供基于FMCW的激光雷达应该只有Aeva, Mobieye和Aurora,而且均没有量产。目前FMCW激光雷达主要的难点在于使用的是1.5um波长的光,在空气中传播损耗大,且受天气影响严重;基于硅芯片的FMCW需要调制信号,对调制器的线性度要求较高,而且成本也是一大问题,硅光始终没有大规模应用,封测成本都比较高。
- 雷达
+关注
关注
49文章
2779浏览量
116415 - 调制器
+关注
关注
3文章
822浏览量
44921 - 三角测距
+关注
关注
0文章
19浏览量
712
原文标题:一文了解TOF、三角法测距和相位测距以及FMCW激光雷达测距原理
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
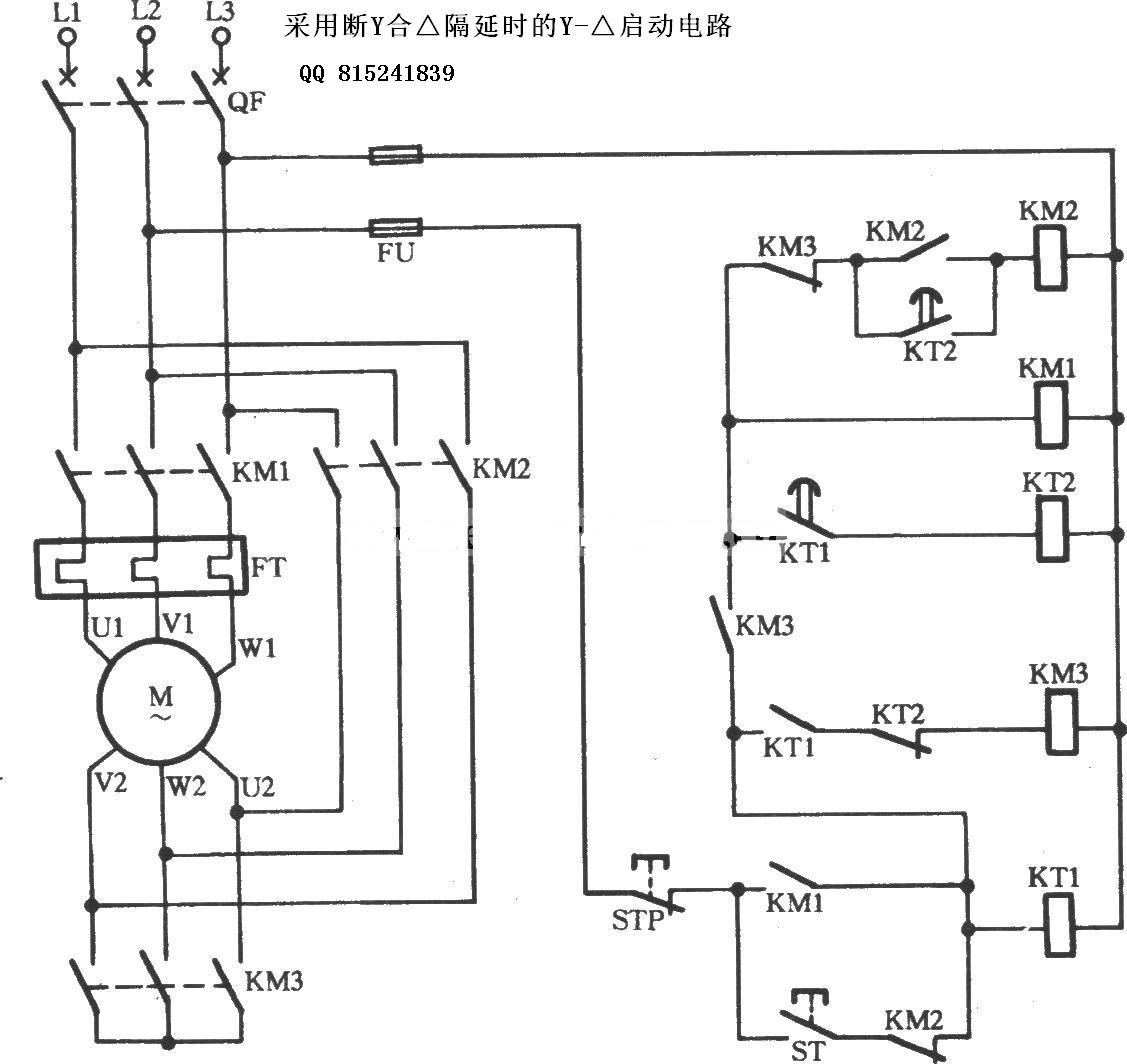
星三角启动电路图工作原理和星三角启动电路实物接线讲解
阐述基于激光三角测距法的激光雷达原理

三角波比较法PWM跟踪算法
基于单片机的红外测距系统设计与实现
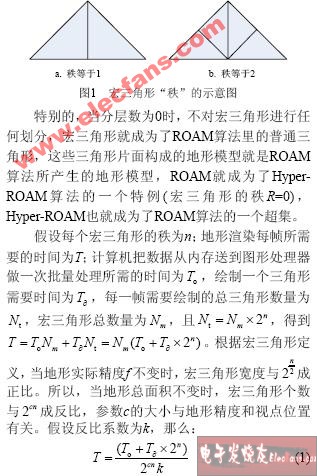
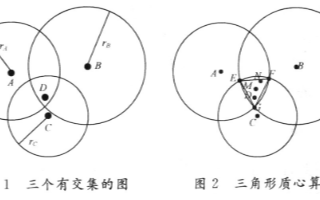
宏三角形
基于RSSI技术的三角形质心算法的建模与仿真研究
单片机毕设之 -- 基于单片机的红外测距系统设计与实现

基于激光三角测距法的激光雷达原理






 工商网监
工商网监
评论