 四轮转向系统结构及工作原理
四轮转向系统结构及工作原理
2.1.4WS 系统的组成
随着二十世纪末以来在信息技术、集成电路、微电子领域的技术突破,以这些技术为基础的汽车电子控制技术也逐步发展成熟,4WS系统的发展成熟也正是基于汽车电子控制技术的进步,4WS系统中对于车辆四轮的控制以及前后轮的转向分配使用到了电子控制技术以及电机助力技术。由于在车辆四轮转向过程中,车辆的前轮和后轮在不同的速度之下的转向方式存在差别,因此在四轮转向控制之中应用4WS结构相对独立,且在车辆前后轮转向系统中不存在机械连接,因此可以确保转向性能可以在系统正常运行的状态下保持高水平。
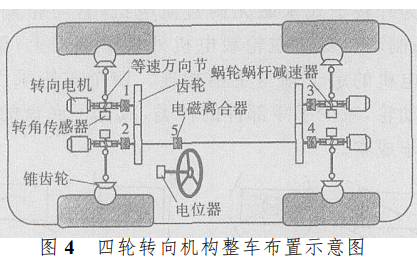
车辆转向机构、ECU、减速器、电动机、传感器等部分共同构成4WS系统,并实现对车辆四轮转向的有效控制。在车辆后轮参与转向的过程中电子控制技术深度介入,帮助车辆后轮执行正确的转向工作,满足车辆的正常行驶以及提升车辆的转向性能。
2.2电子控制 4WS 系统的工作原理
ECU即电子控制单元,常被形象的称为“行车电脑”,ECU是车辆电子控制系统内执行分析计算并向相应部件输出控制信号的单元,在4WS系统中ECU也承担UI车辆运动信号的分析和运算,在车辆进行四轮转向时,位于车辆前轮的传感器将车辆前轮的转向信号以及车辆的运动状态传入ECU,经过ECU对该型号的处理、分析、运算,产生输送向步进电机的驱动信号,步进电机根据驱动信号执行相应的动作作用于车辆的后轮转向机构,通过这个途径控制后轮的转向。ECU在此过程中仍然对车辆的运动状态进行全程、实时的监测,对车辆后轮转向角与目标转向角之间的差值进行计算,根据计算结果对后轮的转角实现实时调整。这样的实时调整与车辆的实际运动状态相契合,实现汽车的四轮转向。
电子控制4WS系统设定有两种转向模式可供驾驶员选择,驾驶员可以通过转向模式开关选择传统的2WS模式也可以保持4WS状态继续行驶,设置这两种转向模式不仅是为驾驶员根据实际路况提供更多地选择,也是当4WS系统出现故障无法正常执行四轮转向时保留传统的前轮转向设置,保证车辆运行的安全性,确保驾乘人员的人身安全。当4WS系统出现故障时,驾驶室仪表台上出现4WS故障指示灯,提醒驾驶员4WS系统出现故障,车辆四轮转向系统不能正常运行,检测车辆运行状态的ECU实时记录故障信息,方便技术人员在故障检测维修时进行检码。
上述的可以实现车辆前后轮同相位以及逆相位转向的4WS系统属于电子电动式四轮转向系统,这种系统的后轮转向装置是受车辆车速的控制,即车辆后轮的偏转角度以及方向是根据车速的大小而改变的,同时后轮偏转角和方向的变化也是对前轮转角和横摆角速度变化的响应。在ECU中设定了车辆在不同速度下的四轮转向控制策略,再车辆高速或者低速状态下根据程序控制前后轮的转向。当ECU接收到传感器发送来的车辆中高速行驶状态的信号亦或是方向盘的小角度转动的信号时,ECU根据控制策略程序控制车辆前后轮进行同相位转向,减小车辆的横摆角速度,降低车辆车身的动态侧偏,帮助车辆在高速行驶时保持操纵的稳定性。当ECU接收到传感器发送来的低速行驶状态或者是方向盘的大角度转动信号时,ECU则采用低速运行时的控制策略,程序控制前后轮实现逆相位转向,车辆前轮转角增大的同时增大后轮的偏转角度,帮助车辆驾驶员轻松操纵低速车辆进行转向,并且降低车辆低速状态下的转弯半径,提升车辆的灵活性。
-
汽车电子
+关注
关注
3026文章
7941浏览量
166900 -
电子控制
+关注
关注
1文章
69浏览量
21623 -
汽车
+关注
关注
13文章
3493浏览量
37251
发布评论请先 登录
相关推荐
关于方向盘转角与前轮转向角的非线性关系
关于汽车转向系统
如何用舵机控制前轮转向,机械结构是怎样的?
主动前轮转向控制技术研究

基于Kalman预测的四轮转向状态估计算法

电液控制全轮转向系统
全方位线控四轮转向电动汽车设计





 工商网监
工商网监
评论