 应用于机器人3D感知的高精度LiDAR与电机驱动解决方案
应用于机器人3D感知的高精度LiDAR与电机驱动解决方案
应用于机器人3D感知的
解决方案
机器人想要进行自主移动,便需要拥有3D感知(3D perception)功能,必须利用各种的传感器来实时掌握机器人在空间中的位置,其中以LiDAR(激光雷达)能够提供高精度的位置传感,最受到业界的重视。此外,机器人也需要通过电机驱动,来执行自身或四肢的精准移动。本文将为您介绍LiDAR技术的发展,以及由ROHM推出的LiDAR与电机驱动解决方案。
激光雷达带动新服务的创新
近未来的AI机器人是指通过给自主移动机器人(AMR)增加3D感知功能,使机器人能够在三维空间中判断自己的位置并识别自身的动作,从而实现高级自主移动和各种运动控制的机器人。AMR要进行各种运动控制,不仅需要确认自身所处位置,还需要进行实时3D感知数据处理(比如对周边物体进行分类、进行物体跟踪等),因此使用LiDAR和摄像头的技术架构已经成为业界主流。
随着实时3D感知数据量的不断增加,构建深度学习模型已经成为当前的技术发展趋势。由于深度学习模型的学习环境通常是处于理想条件下的,因此能够准确地进行状态推断。然而,在机器人的实际工作环境中,难免要面对不完整的传感器信息和复杂的移动控制等问题。
机器人用的LiDAR模块对LD(激光二极管)的分辨率要求很高,因此对所用LD的性能主要有以下两项要求,首先光源的尺寸要尽量小,其次则是光束的发散角要尽量小。通常,从半导体激光二极管发出的光具有一定的发散角,因此,需要使用准直透镜将光变为平行光(图1)。
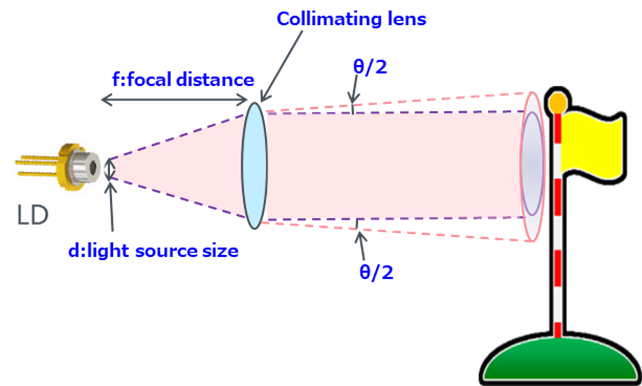
图1:光源大小对光斑尺寸的影响
然而,准直透镜并不能将半导体激光二极管发出的光完全转变为平行光。通常,从透镜射出的光束具有一定的发散角(θ),该发散角是由光源尺寸和透镜焦距这两个参数所组成的关系式(公式1)决定的。
公式1:θ~ d / f
(d表示光源大小,f表示透镜焦距)
要想实现高分辨率,就需要进一步减小从透镜射出的光束的发散角(图1中的θ)。关于LD的光源尺寸,因为从透镜射出的光束的发散角(θ)和LD的光源尺寸(d)呈正比例,所以如果d减小50%,则θ也会减小50%。关于光束发散角,从公式1可以看出,焦距越长,从透镜射出的光束的发散角越小,因此,最好选用发散角小的LD。
图2是表示LD光束发散角为20deg和25deg时的焦距差异的示意图。在透镜直径相同的情况下,如果使用光束发散角为20deg的LD,则可以选择焦距长约25%的透镜。这样,从透镜射出的光束的发散角(θ)也可以减小20%左右,光斑尺寸也能缩小20%。
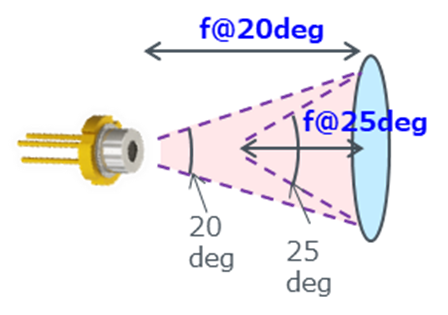
图2:光束发散角与焦距的关系(20deg和25deg时的比较)
可实现自主工作的AI机器人
高精度LiDAR解决方案
针对这些实际工作环境问题,ROHM推出了LiDAR解决方案,由具有优异的边缘检测能力且可输出高精度点云数据的激光二极管、可以高速驱动激光二极管的GaN HEMT、以及用来驱动GaN HEMT的栅极驱动器IC构成,通过能够获取稳定的3D感知数据的端到端模型,可实现自主工作的AI机器人。
ROHM用于LiDAR的半导体激光二极管产品阵容非常丰富,其中包括实现业界超小光源尺寸(35µm ×10µm)的RLD90QZWA、以及光源尺寸为270µm ×10µm的大功率RLD90QZW8等多种产品(表1)。
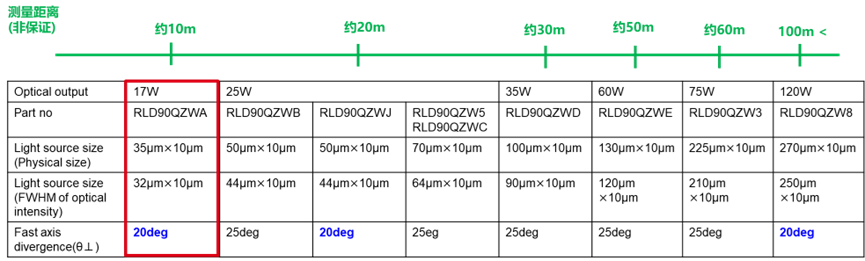
表1:用于LiDAR的ROHM LD产品阵容
将产品用在机器人应用中时,其关键在于对周边10~20m左右的环境的准确感知。对于需要进行近距离精准测距的机器人应用,推荐采用2022年投入量产的产品RLD90QZWA,这款产品的光源尺寸达到了业界超小水平,只有35μm×10μm大小,而且光束发散角(快轴方向)为20deg。与以往产品RLD90QZW5(光源尺寸70μm×10μm,θ⊥=25deg)相比,其透镜出射光束的发散角缩小了60%。选用这款RLD90QZWA,不仅可以选择焦距更长的透镜,还能够获取更高精度的点云数据。
提升开发速度的GaN HEMT
激光驱动参考设计
通常,LiDAR多采用ToF(Time of Flight,飞行时间)方式的测距方法。ToF方式是通过测量从光源发射出来的光经目标物反射后返回至接收器所用时间,再计算出距离的一种测距方法。如果脉冲宽度过大,则接收器接收到的光脉冲信号容易混叠在一起,这样就难以区分距离接近的两个以上的目标物了。因此,要提高分辨率,就需要降低脉冲宽度。ROHM为了构建能够通过窄脉冲信号获得更高精度点云数据的系统,开发出将激光二极管驱动中的关键 — GaN HEMT(EcoGaN)与GaN HEMT驱动用的单通道高速栅极驱动器IC相结合的参考设计 ―“REFLD002”,并已在ROHM官网上公布了相关的设计信息。

图3:GaN HEMT激光驱动参考设计“REFLD002”
要想充分激发出GaN HEMT可高速驱动的特性,就必须使用高速栅极驱动器进行驱动。ROHM开发的GaN HEMT驱动用的单通道高速栅极驱动器IC“BD2311NVX-LB(工业设备用)/-C(车载用)”已经开始提供样品。该款产品采用的驱动方式在保持高转换速率的同时,还可以减少10%左右的过冲,领先于业内的同类产品。此外,普通GaN HEMT的栅极-源极间耐压为6V,而ROHM的EcoGaN 则达到了8V。基于这些产品优势,用户将不必再担心驱动电路开关时的过冲所造成的破坏,电路设计将会变得更加容易。
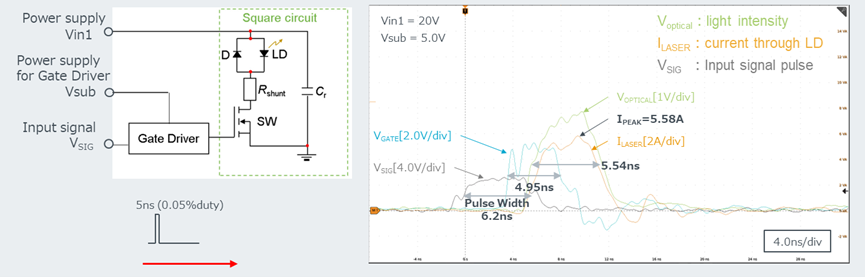
图4:激光二极管“RLD90QZWA”的驱动波形
另外,ROHM官网上还公开了一款免费仿真工具“ROHM SolutionSimulator”,并配有相应的仿真电路,用户可以利用该仿真工具轻松地确认不同电路常数下的波形变化情况,这对于前期的设计研究会有很大帮助。
不仅如此,ROHM的官网上还公开了产品单体的应用指南、仿真模型(SPICE模型、Ray数据)以及PCB库数据。用户通过直接使用参考设计,并有效利用参考设计的电路仿真及相关产品数据,可以大幅削减设计工时和评估工时,大大缩短相关产品导入市场的周期。
小型高效的电机驱动解决方案
机器人应用与电机驱动密切相关,由ROHM推出的电机驱动解决方案中,包括了由机器人自主移动相关的轮系和机器人的各种运动控制相关的控制器的电机驱动中不可或缺的MOSFET,以及用来驱动MOSFET的栅极驱动器IC构成,具有小型、高效的特点。
对于用电池驱动的自主移动机器人而言,主流的电源方案为DC24~72V电源,而对于工业机器人而言,则主要使用DC48V电源。随着AI、传感(图像识别)以及驱动能力提升等技术的发展,机器人的功能不断升级,相应地,就需要消耗更多的电力。在这种背景下,功率转换技术的问题日益凸显,并已成为亟待解决的课题,而AI机器人技术领域的功率转换效率也成为一项至关重要的因素。
ROHM通过将可驱动外置Nch MOSFET、非常适用于DC48V应用的电机驱动、耐压为100V的高低边栅极驱动器IC“BD2320UEFJ-LA”与采用了铜夹片结构、封装小巧、功率损耗低的Nch MOSFET“RS6xxxxBx/RH6xxxxBx系列”相结合的解决方案,降低了开关损耗和导通损耗,非常有助于提高应用产品的工作效率。

图5:ROHM的栅极驱动器IC和Nch MOSFET产品封装示意图
举个例子,当在工业设备用的电源评估板上比较电源效率时,在稳态工作时的输出电压范围内,RS6xxxxBx/RH6xxxxBx系列的电源效率在峰值时高达95.01%。
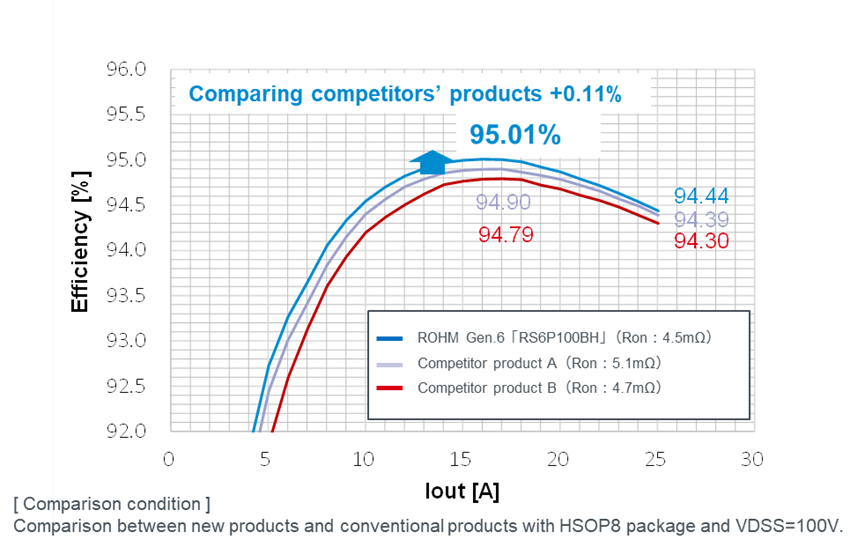
图6:RS6xxxxBx/RH6xxxxBx系列与普通产品的效率比较
结语
机器人搭配3D感知的LiDAR解决方案,再结合上AI技术,将使机器人应用迈向新的世代。ROHM针对AI机器人技术领域的高级自主移动和各种运动控制所用的LiDAR模块,推出了ROHM LiDAR解决方案,通过将拥有业界超小光源尺寸的激光二极管和可高速驱动激光二极管的GaN HEMT(EcoGaN),以及用来驱动GaN HEMT的栅极驱动器IC组合起来,助力构建能够获得更高精度点云数据的系统。
另外,ROHM还推出了电机驱动解决方案,通过将非常适用于电机驱动的高低边栅极驱动器IC与采用了铜夹片结构、封装小巧、功率损耗低的Nch MOSFET相结合,助力应用产品进一步提高工作效率。不仅如此,ROHM还在官网上公开了相关的参考设计以及免费的仿真工具“ROHM Solution Simulator”,有效利用这些资源可以帮助用户削减设计工时和评估工时,大大缩短相关产品导入市场的周期,将会是相关机器人应用的理想选择。
审核编辑:汤梓红
- 机器人
+关注
关注
209文章
27720浏览量
203635 - 电机驱动
+关注
关注
60文章
1151浏览量
86179 - 激光雷达
+关注
关注
966文章
3843浏览量
188361 - LIDAR
+关注
关注
10文章
311浏览量
29193
原文标题:【技术干货】应用于机器人3D感知的高精度LiDAR与电机驱动解决方案
文章出处:【微信号:艾睿电子,微信公众号:艾睿电子】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box
Voxel3D飞行时间传感器机器人视觉参考设计
拆开工业机器人,让你见识机器人驱动系统中的电机种类
拆开工业机器人,让你见识机器人驱动系统中的电机种类
高精度3D扫描如何实现?
超声电机—机器人手指关节的应用
避障机器人电路设计解决方案
高精度传感器如何在创造机器人的自然动作中发挥作用?
基于Arduino的3D打印2轮机器人
奥比中光全栈式3D方案助力机器人视觉进化
如何实现高精度的3D感知
高精度3D视觉技术,助力工业机器人实现汽车零部件高效上下料
新品 | Bumblebee X系列用于高精度机器人应用的新型立体视觉产品

- 设计技术
- vwim德赢
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- vwin
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- vwin6688
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠: wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶: huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉: mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华: lanhu@huaqiu.com
- 投资合作
- 曾海银: zenghaiyin@huaqiu.com
- 社区合作
- 刘勇: liuyong@huaqiu.com
关注我们的微信

下载发烧友APP

德赢Vwin官网 观察






版权所有 © 湖南华秋数字科技有限公司
德赢Vwin官网 (电路图) 湘公网安备43011202000918 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号
评论