 全国产EtherCAT运动控制边缘控制器-ZMC432H
全国产EtherCAT运动控制边缘控制器-ZMC432H
引言
EtherCAT运动控制边缘控制器是工业互联网的关键组件之一,结合丰富的运动控制功能、实时数据采集、处理和本地计算等,具备高度灵活的可编程性和出色的运动控制性能,为运动控制协同工业互联网应用带来巨大市场潜力,同时也使其成为企业实现智能制造并高效稳定生产的核心控制部件。
ZMC432H产品概述
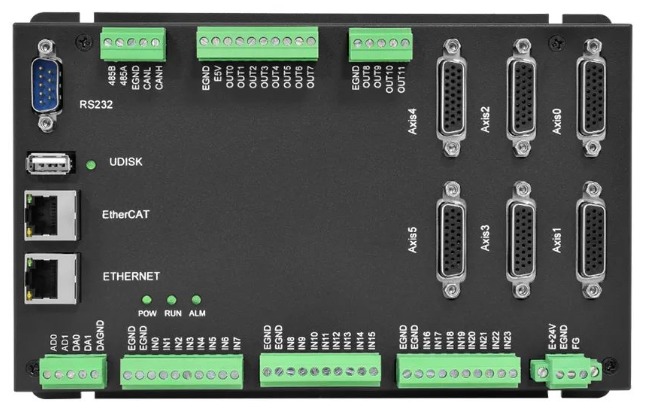
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
ZMC432H产品特性
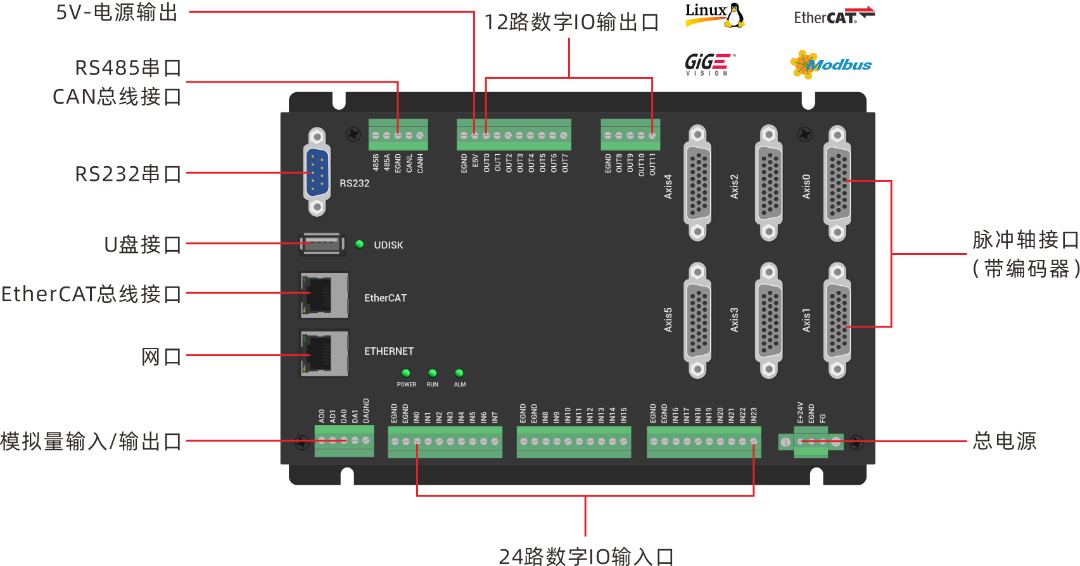
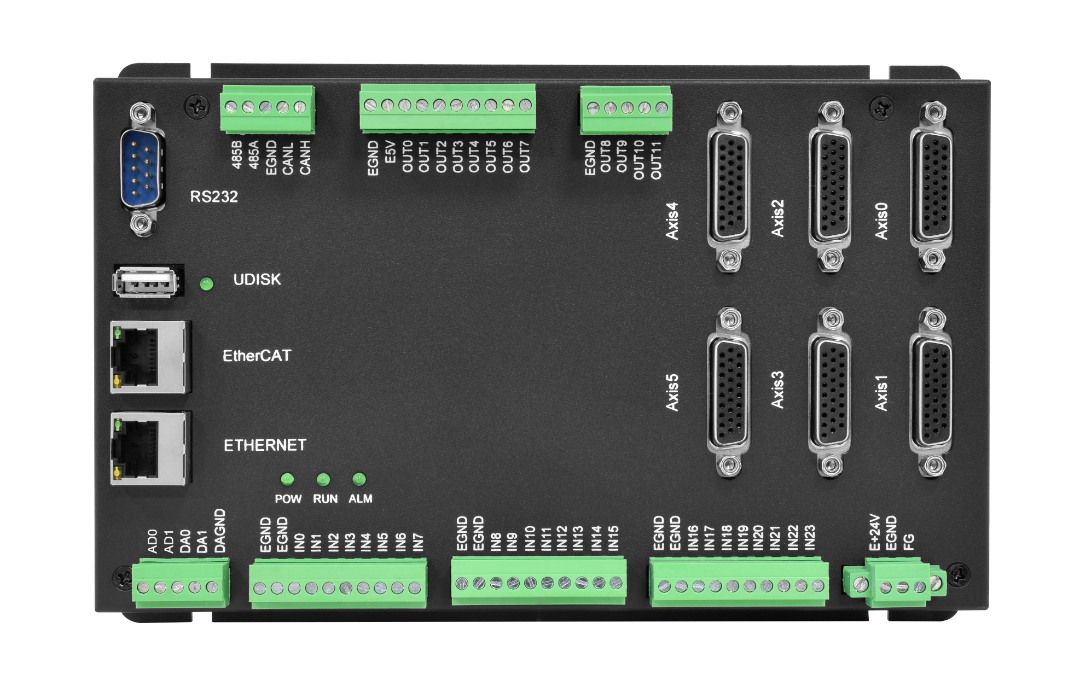
●24路通用输入和12路通用输出,其中包括4路高速输入和4路高速输出; ●2路vwin 量输入(AD),2个模拟量输出(DA),可读取和输出模拟信号,用于监测和控制各种物理量和过程变量; ●6路10MHz脉冲输出和编码器轴接口,支持精准的运动控制和实时位置反馈; ●内置多项实时性运动控制功能,例如视觉飞拍、多维PSO、高速位置锁存,多轴同步运行等; ●丰富通讯接口,可用于与外部设备进行数据交互和信号控制,实现灵活的系统集成和协同操作; ●通过ZCAN和EtherCAT扩展模块进行IO硬件资源扩展,可扩展至4096个隔离输入口和4096个隔离输出口; ●掉电检测、掉电存储,多种程序加密方式,能够有效防止系统故障,保护项目工程文件数据,并提高系统的可靠性;
●可定制ZMC432HT版本,运行温度区域拓宽至-40°C~70°C,适应自动化设备在极端环境下的应用需求。
ZMC432H一站式解决方案
ZMC432H为智能制造的工业互联网用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
方案涵盖通用的运动控制引擎和实时内核MotionRT,用户可通过PC端的IDE编程环境RTSys,在单个硬件平台上实现应用程序的可移植性和集中控制,从而降低成本,提高系统可靠性和安全性。
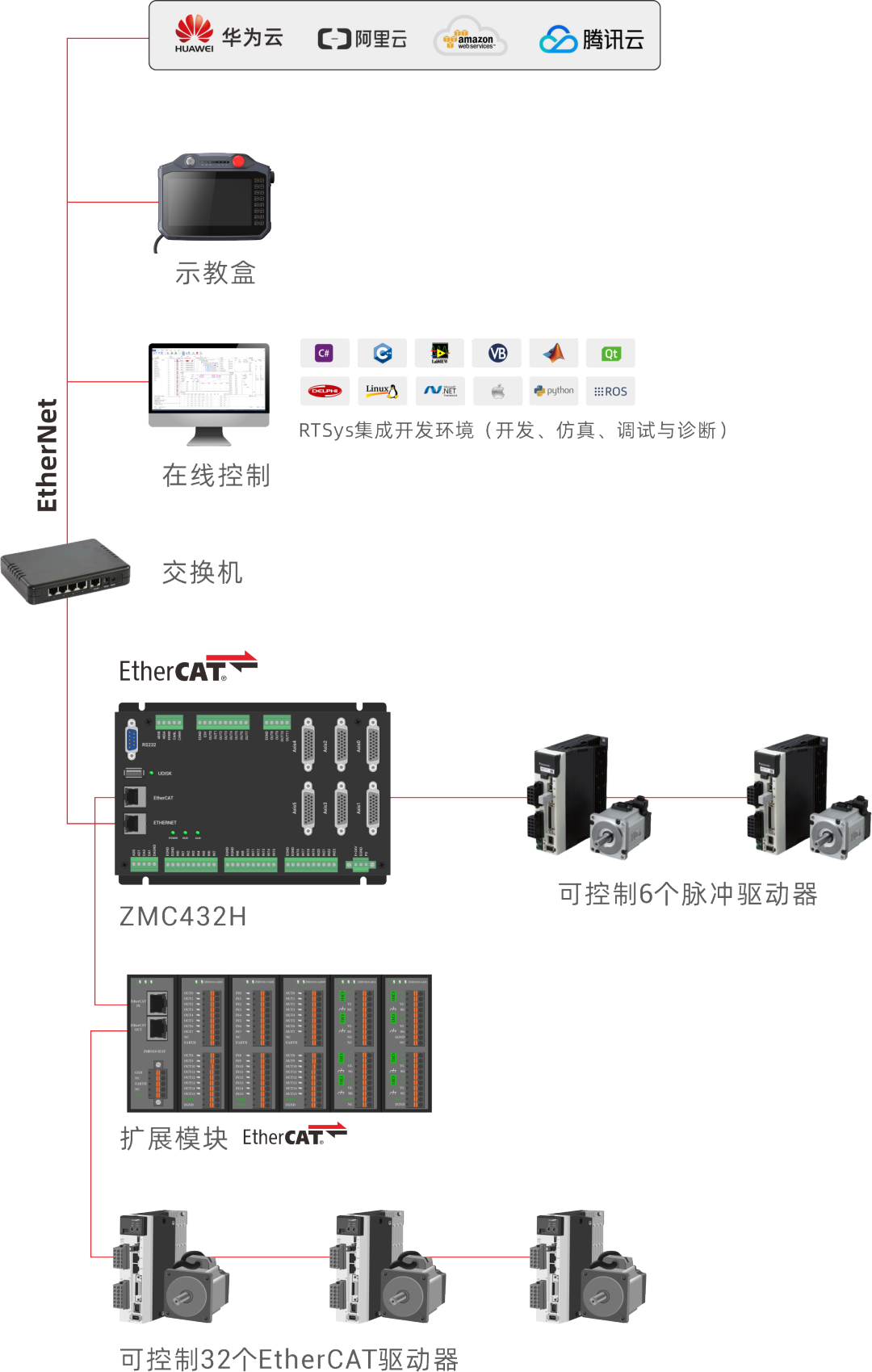
●32轴EtherCAT总线控制,刷新周期1ms;
●6路10MHz高速差分脉冲输出,总线轴、脉冲轴可混合插补;
●控制器自带I/0,模拟量输入和输出;
●EtherNET网口对接MES、云平台;
●可配置Linux系统,实现工艺开发的差异化;
●硬件核心器件全国产,运动控制核心runtime软件MotionRT正运动技术自主自研,PC端IDE RTSys正运动技术自主自研持续改进。
ZMC432H内置软件
RTSys是正运动技术推出的一款集成机器视觉+运动控制功能的一站式绿色免安装开发软件,全国产自主工业软件IDE开发环境。
支持RTBasic、RTPLC梯形图、 RTHMI组态和机器视觉RTVision等二次开发,并可混合编程,实时仿真、在线跟踪以及诊断与调试,快速帮助客户与用户实现智能装备的视觉定位、测量、识别、检测和复杂的运动控制等系统的开发。
ZMC432H市场应用
全国产EtherCAT运动控制边缘控制器-ZMC432H适用于机器人、电子半导体设备、点胶设备、非标设备、印刷包装设备、锂电新能源设备、医疗设备、流水线等场合应用。
-
控制器
+关注
关注
112文章
16332浏览量
177795 -
数据采集
+关注
关注
38文章
6052浏览量
113617 -
工业互联网
+关注
关注
28文章
4320浏览量
94095
原文标题:全国产EtherCAT运动控制边缘控制器-ZMC432H
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐



【正运动】全国产EtherCAT运动控制器 | ZMC432H
脉冲+总线运动控制器ZMC432H用户手册
EtherCAT运动控制边缘控制器ZMC432H接口与功能解析



EtherCAT运动控制:RTSys对控制器的监控与设置原理



全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发

全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工






 工商网监
工商网监
评论