 基于IM828-XCC的高速电机驱动器设计
基于IM828-XCC的高速电机驱动器设计
随着现代机床向高速、高精度方向发展,对机床主轴的技术要求越来越高。电主轴作为高速机床的重要组成部件之一,因其转速高、体积小和优异的动态性能等特性,可有效提高机床的动态平衡,避免了振动和噪声。主轴电机放置在机床的主轴单元内,直接驱动负载。因此,简化了传统的机械驱动结构,实现了“零驱动”。由于电主轴的广泛应用,推动着电机主轴系统向高精度、高速、低能耗、高效率、高可靠性的方向不断发展,成为目前世界各国研究的热点。
在现代电主轴、机轴一体化的趋势下,要达到高速度和小型化的要求,会增大感应电机的铜耗,出现过热、磨损严重的现象,导致电机性能不足。随着永磁同步电机的发展,高速永磁同步电主轴应用愈加广泛。高速永磁同步电主轴与传统异步感应电机相比,由永磁体提供气隙磁场,具有功率因数高、体积小、效率高等优点,在高速磨削系统、高速离心空压机等领域有着广泛的应用和发展前景。
高速永磁同步电机(High-Speed Permanent Magnet Synchronous Motor , HSPMSM),通常指额定转速超过10000r/min以上或者指困难系数(转速与功率平方根的乘积)处于(1~10)×105r/min√kw范围内的电机,其控制性能决定着系统工作效率、运行稳定性、寿命以及可靠性等方面,而控制特性也依赖于电路设计和驱动器中的功率半导体性能,尤其SiC逆变技术的引入使得HSPMSM驱动器的性能有了长足的进步。
本文将介绍由西安理工大学电气工程学院王建渊老师课题组搭建的一款基于IM828-XCC的高速电机驱动器,用于驱动一台额定转速15000r/min,额定功率2.2kW的高速主轴电机,以实现对高速电机的高性能控制,具有高功率密度、高效率和低热耗散等特点。
本项目设计的高速永磁同步电机驱动控制系统需实现的主要功能有:实现电流和电压等信号的采样处理与控制;实现高速永磁同步电机无传感器的转速闭环控制;实现对电机运行状态的速度、定子电流、电压、功率器件工作温度等相关数据的监测,方便电机运行状态的检查与后期维护。
高速永磁同步电机驱动控制系统要求电机起动平稳、速度稳定和可调速范围广,根据高速永磁同步电机的主要参数来设计其驱动控制系统的技术指标要求如下:
1 | 驱动器最高输出功率:4kW; |
2 | 电机速度控制稳态精度:±0.5%; |
3 | 驱动器保护功能:具备过压、过流、过热等故障诊断及保护功能。 |
1
CIPOS Maxi IM828简介
高速电机因其转速高、基频高的特点,对相应的驱动技术提出了更高要求,若开关频率过低时,会导致驱动器输出电压波形质量较差,随着转速升高,控制延迟及时间延迟也会随之加大进而影响控制精度。本课题所设计搭建的高速电机驱动器选用英飞凌公司生产的IM828-XCC,其采用SiC MOSFET组成桥式单元,具有优良导热性能,适用于工业驱动、电机控制等工业应用。由于采用碳化硅技术,使其成为高速电机驱动领域的最佳选择。
IM828-XCC具体分为以下几个功能单元部分:
1
逆变部分:采用1200V CoolSiC Mosfet的三相逆变器与优化的6通道SOI栅极驱动器相结合,具有优异的电气性能,采用CoolSiC的逆变单元,导通损耗小,开关特性优异。
2
保护功能:过电流关闭,内置NTC热敏电阻用于温度监测,所有通道的欠压锁定,低侧源引脚可用于所有相电流监测,保护期间6个开关全部关闭。
3
其他功能:允许负VS电位高达-11V,用于VBS=15V的信号传输,集成自举功能。
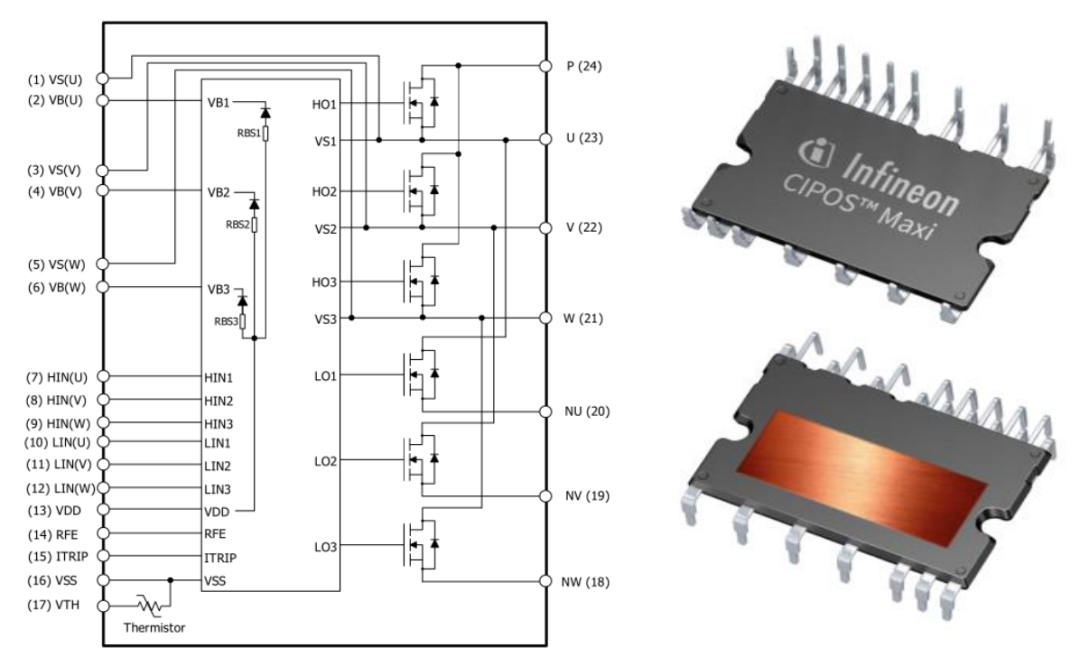
图1:IM828-XCC器件内部框图和器件图片
2
驱动器设计
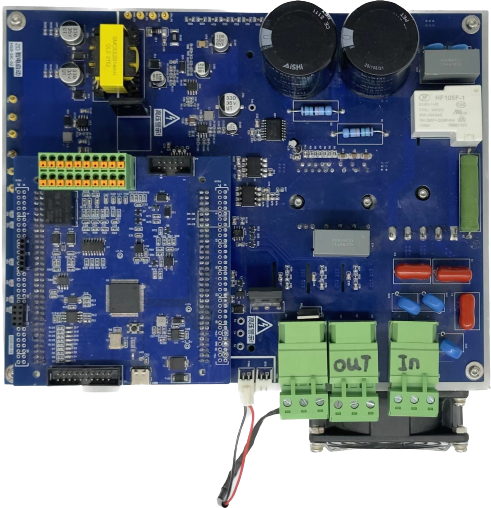
为了充分展示IM828的出色性能和优秀特点,设计了一款4.0kW的驱动器,图2所示为控制板部分,图3所示为功率板部分。
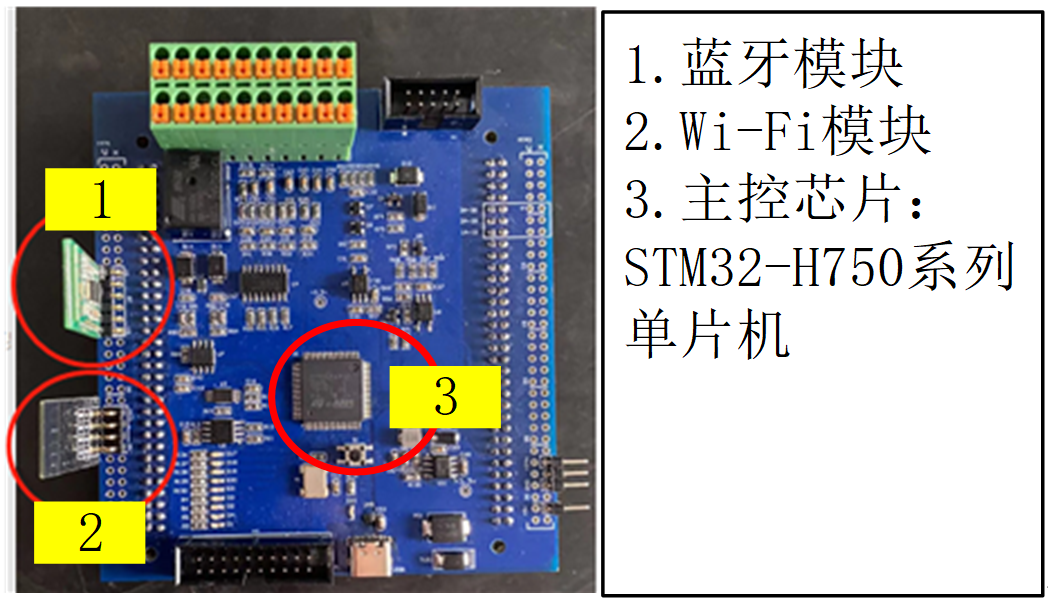
图2:控制部分主要器件位置
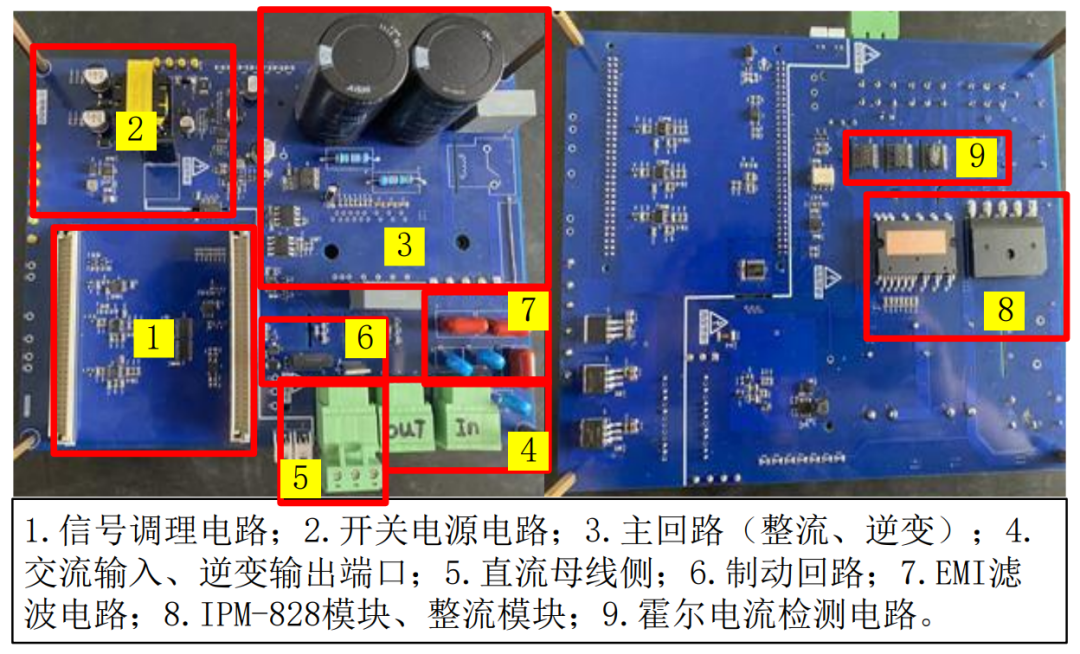
图3:驱动控制器功率部分主要器件位置
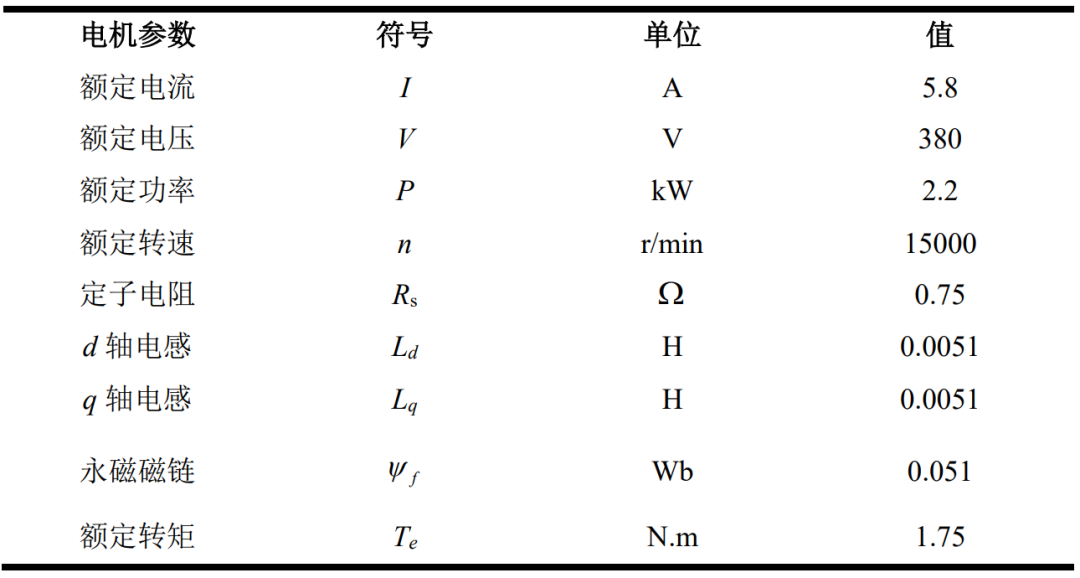
为了验证驱动板的性能,测试了在不同工况下IPM的开关特性对电机运行的影响,通过三相调压器对平台供电,被控电机是意大利YSA公司研制的高速主轴电机,电机具体参数如表1所示。电机控制方式为有速度FOC,如图4所示为IPM的W相桥臂开关管的dv/dt。
表1 高速电机参数
实验工况一
在空载运行条件下分别进行了fs为20kHz和fs为60kHz工况下的性能测试。
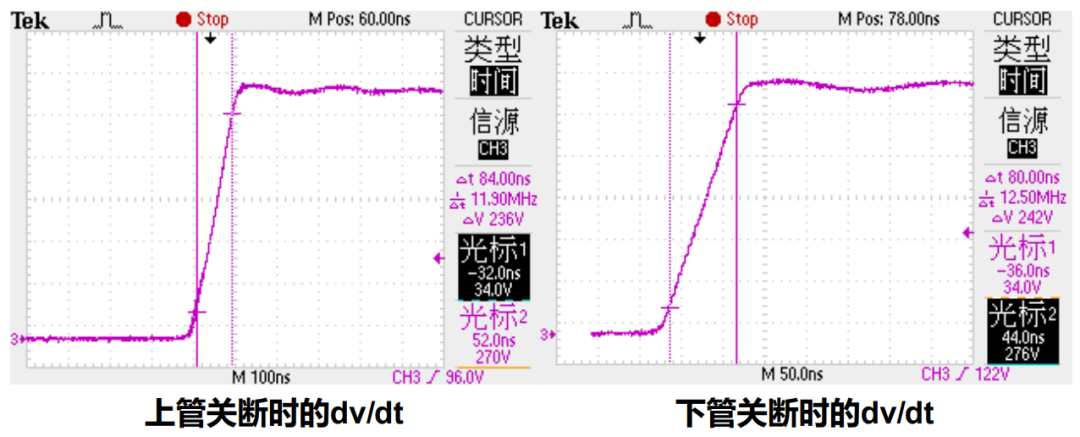
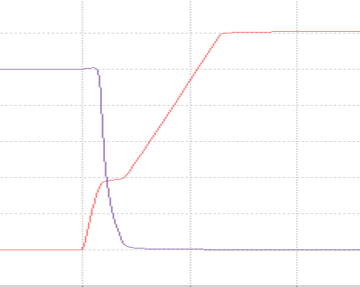
图4:fs=20kHz IPM的
W相桥臂开关管关断的dv/dt
根据测试波形可以得到关断时上管的dv/dt为2809V/us,下管的dv/dt为3025V/us。同时也对IPM的导通与关断延时进行了测试,测试结果如图5所示,并对MCU到IPM的驱动信号延时进行测试,测试结果如图6所示。
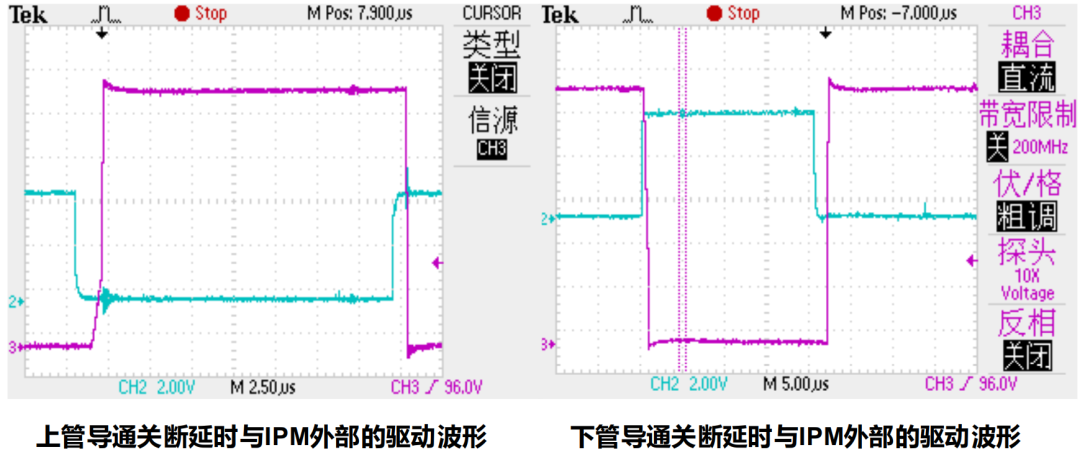
图5:fs=20kHz IPM的导通与关断延时
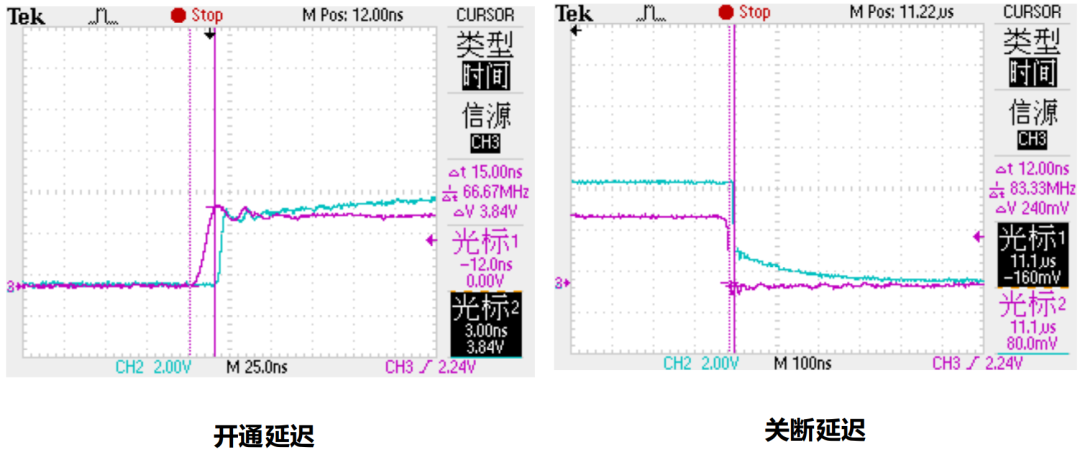
图6:fs=20kHz CPU到IPM的驱动信号延时
同时,为了体现IPM_828-CXX在高开关频率下的特性,在开关频率为60kHz下也进行了相关波形采集,如图7-9分别为在fs=60kHz下的W相桥臂开关管关断时的dv/dt、IPM的导通与关断延时、MCU到IPM的驱动信号延时。
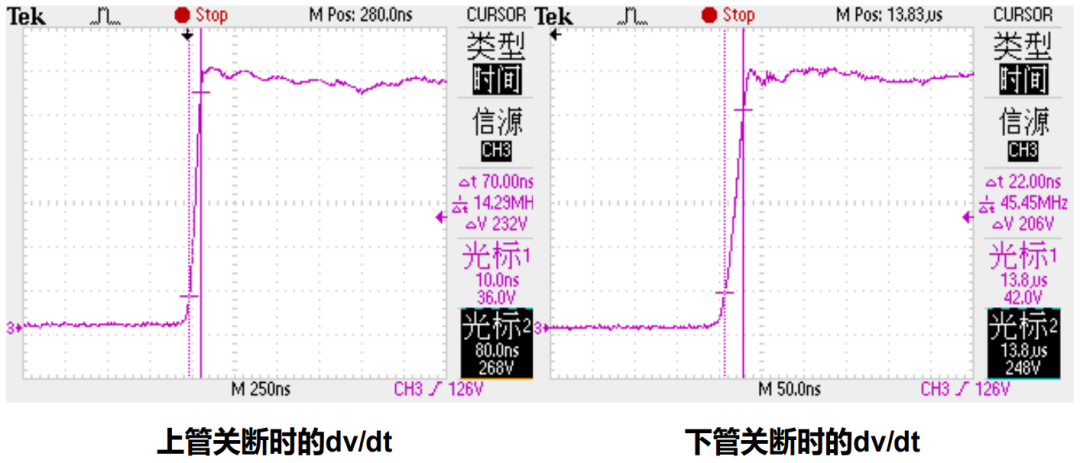
图7:fs=60kHz IPM的W相桥臂开关管关断的dv/dt
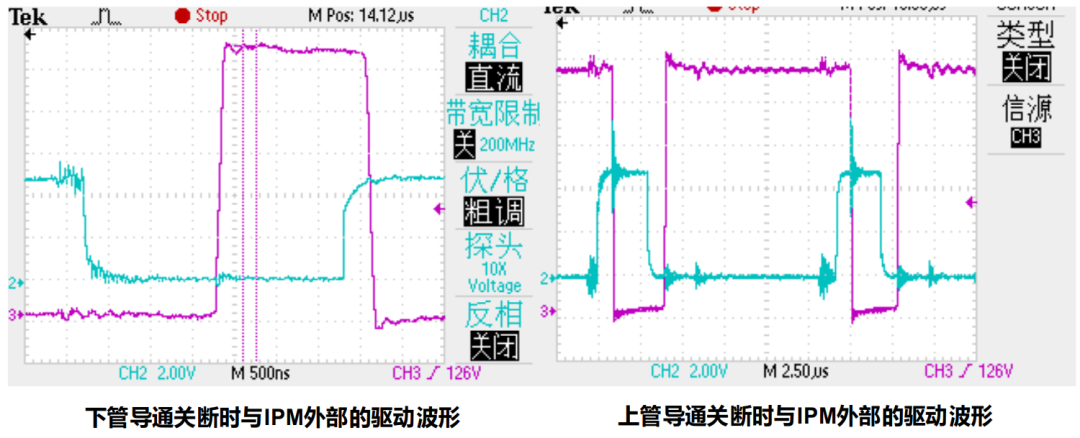
图8:fs=60kHz IPM的导通与关断延时
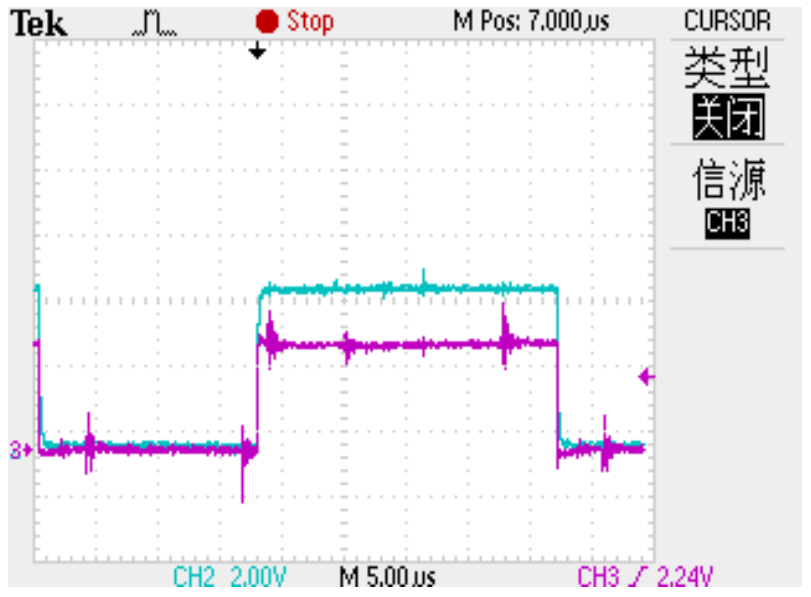
图9:fs=60kHz CPU到IPM的驱动信号延时
实验工况二
电机空载启动,给定转速1000r/min,稳定运行时突加满载TL=1.75N.m,开关频率fs=30kHz,电机的相电流如下图10所示,其中图(a)为空载运行时的电流波形,图(b)为满载运行时的电流波形,可以看出电机在空载情况下运行时,输出电流在0A附近波动;电机在满载情况下运行时,输出电流稳定,实验结果也验证了本课题所设计搭建的实验平台具有良好的驱动性能。
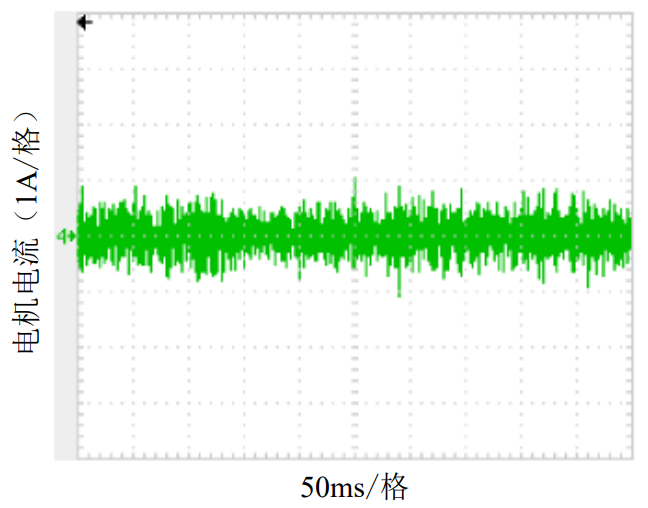
(a)空载时电流波形图
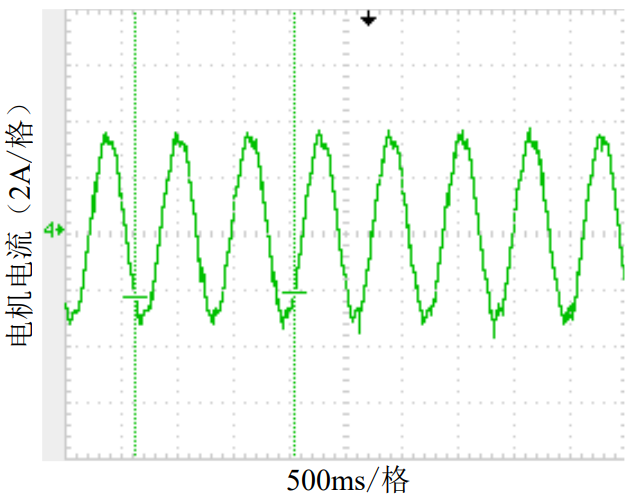
(b)满载时电流波形
图10:电机突变载情况下的电流波形
此时IPM中W相桥臂的dv/dt波形如下:
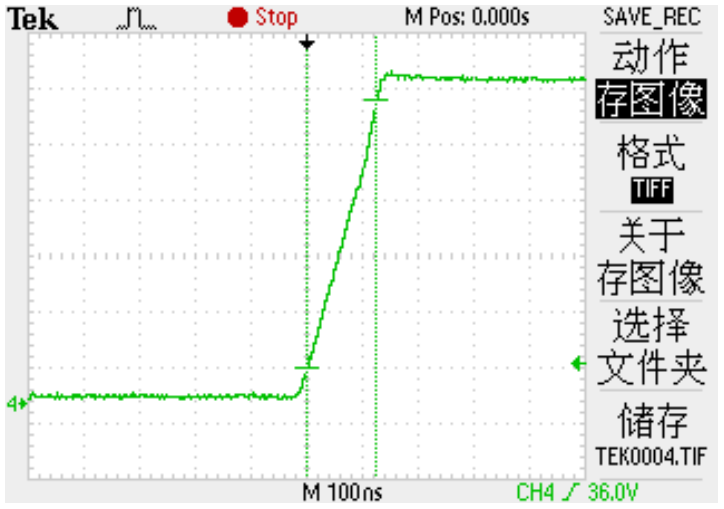
(a)MOS管关断时dv/dt
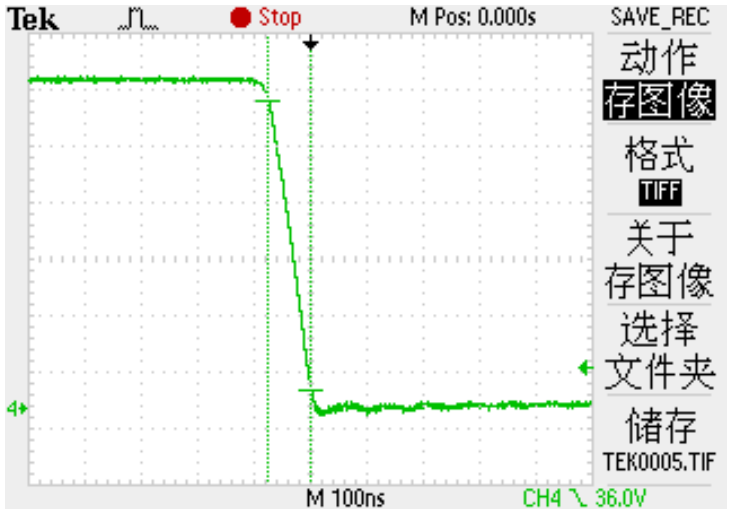
(b)MOS管开通时dv/dt
图11:W相桥臂上管的关断与开通时的dv/dt
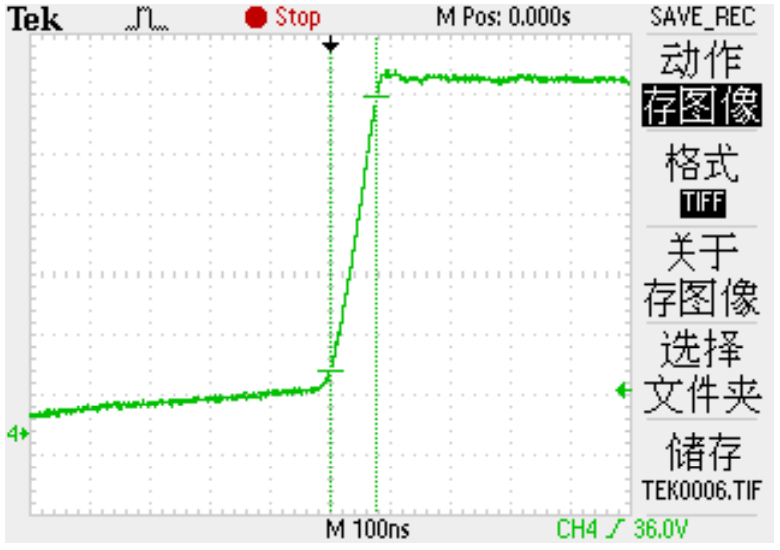
(a)MOS管关断时dv/dt
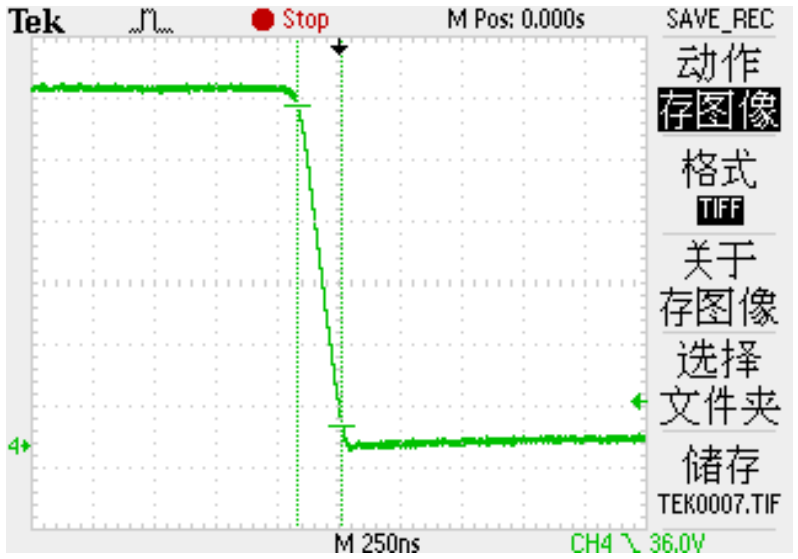
(b)MOS管开通时dv/dt
图12:W相桥臂下管的关断与开通时的dv/dt
表2 满载时IPM内部W相桥臂MOS管的dv/dt

当电机系统稳定运行15分钟,在环境温度为21℃的条件下,用手持的温度测试仪测得芯片附近的温度为40.6℃。

3
系统设计要点及经验分享
1
硬件驱动保护调理
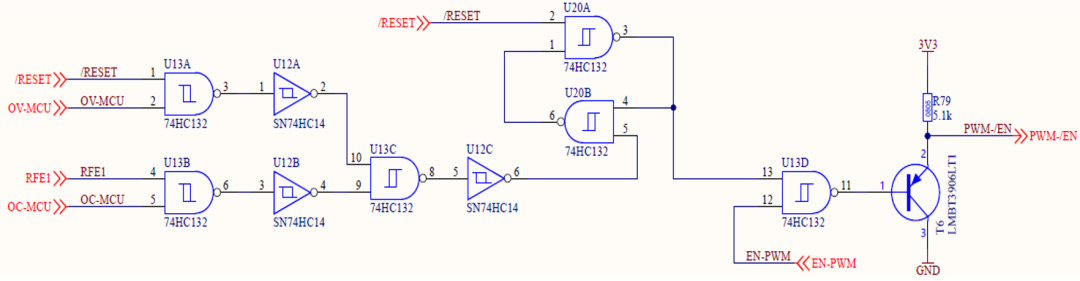
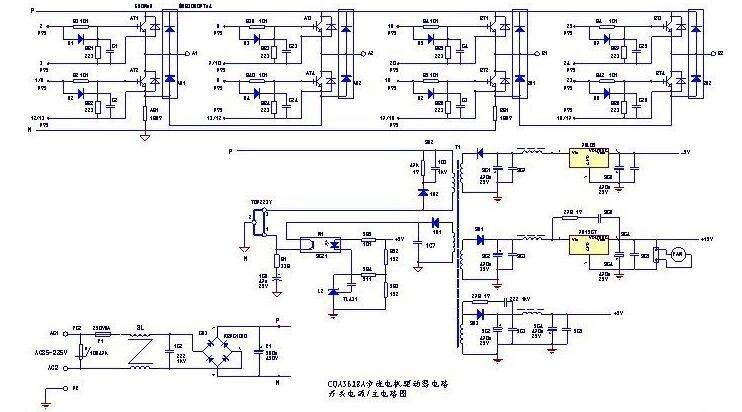
图10:硬件驱动保护调理电路图
硬件驱动保护调理电路具有以下保护功能:
MCU复位;
母线过压;
母线过流;
IPM复位信号(VDD欠压、ITRIP过流);
Enable_PWM。
故障时,PWM-/EN引脚输出为高电平,74LVX4245停止输出;正常时引脚输出为低电平。
2
散热器设计
高速电机驱动控制器尺寸较小,功率较大,如何将热量快速散去也是整体设计的难点之一,根据图11所示得设计原理,考虑到IPM_IM828-XCC的位置,需要在IPM以及整流桥各加装垫块,IPM垫块是为了保证IPM和散热器之间的爬电间距和安全距离。
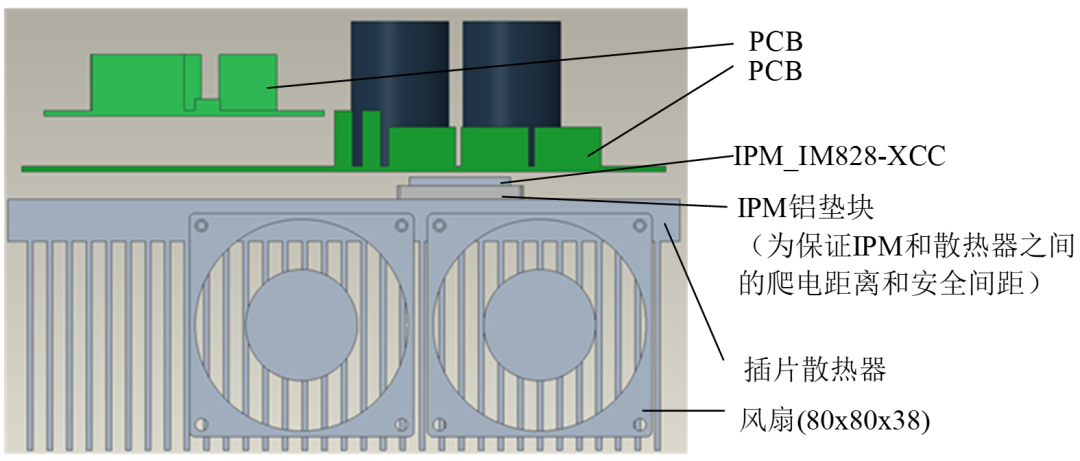
图11:散热器设计
3
热保护设计
在驱动控制器温度过高,超过了设定值,会起到保护作用。
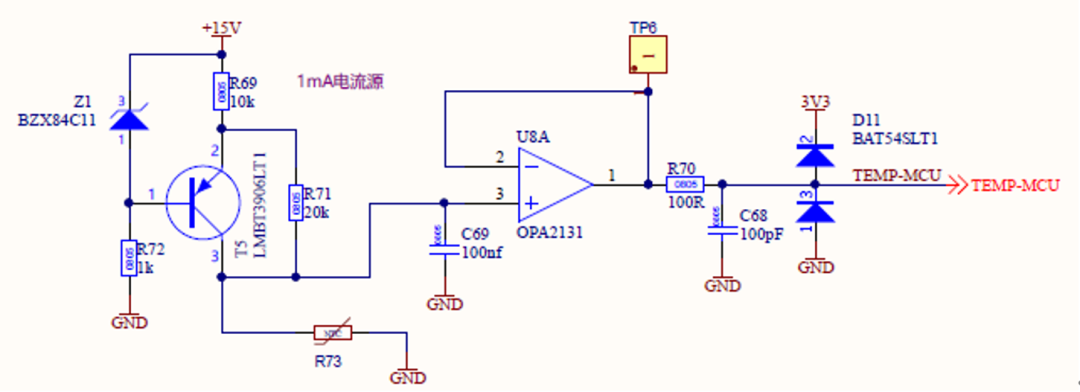
图12:热保护设计原理图
上图所示的温度检测电路,其基本原理是利用NTC热敏电阻(5KΩ,精度)的阻值变化特性,连接到PNP管构成1mA的恒流源电路中,即可检测热敏电阻上的压降变化,经过电压跟随器与RC电路输入到MCU,通过软件实现过温保护。
在本文所提及的热保护设计方案中,考虑到热敏电阻安装部位与芯片之间存在传导热损失,故设置过温保护点为90℃,此时根据NTC热敏电阻阻值变化特性表,此时阻值为,MCU侧的输入电压为0.6V左右,通过DAC模块读取电压之后经过软件程序的比较,输出保护信号,进而封锁驱动信号,保护器件。
-
英飞凌
+关注
关注
66文章
2183浏览量
138644 -
驱动器
+关注
关注
52文章
8226浏览量
146249 -
电机
+关注
关注
142文章
9000浏览量
145336 -
电机驱动
+关注
关注
60文章
1215浏览量
86722 -
高速
+关注
关注
0文章
115浏览量
23162 -
机床
+关注
关注
1文章
580浏览量
30249
发布评论请先 登录
相关推荐
七特步进电机驱动器型号
步进电机驱动器工作模式_步进电机驱动器电路图
电机驱动器是什么
步进电机驱动器拨码
新品 | 采用IPM IM323 1500W电机驱动的评估板






 工商网监
工商网监
评论