 自研域控制器的路线,正在被越来越多车企选择
自研域控制器的路线,正在被越来越多车企选择
电子发烧友网报道(文/梁浩斌)汽车电子电气架构在过去十年间发生了众多变化,初期随着汽车电子设备的增多,包括ABS、车身电子稳定系统、液晶仪表、娱乐影音等设备,让ECU的数量不断增加。
每增加一个功能、一个电子部件,ECU就要增加一个,而每个ECU都需要通过CAN总线和LIN总线连接在一起,系统越来越复杂。于是为了解决这个问题,行业内开始将汽车的各个部分ECU,分成几个域,用几个域控制器分别代替这几个域的多个ECU,来降低系统复杂度,减少线束长度。
如今域控制器也分为多条路线并行发展,这里我们探讨一下域控制器的发展情况以及车企自研的趋势。
汽车电子电气架构的主流形式
传统的汽车电子电气架构使用分布式,在汽车电子部件越来越多的情况下,汽车电子电气架构也从分布式逐渐往集中式发展,域控制器的出现就是其中一个里程碑。
域控制器包括处理器等硬件、操作系统和软件/算法等三个层面组成,通过一个高性能的域控制器处理器,加上多个硬件接口资源以及软件层面的配合,就可以将多个ECU所实现的核心功能集成到一个域控制器上。
将ECU集成到域控制器,主要目的一方面是汽车智能化趋势下越来越多的电子部件需求,另一方面提高系统集成度,减少线束数量,在提高系统性能的同时,还能降低硬件成本。
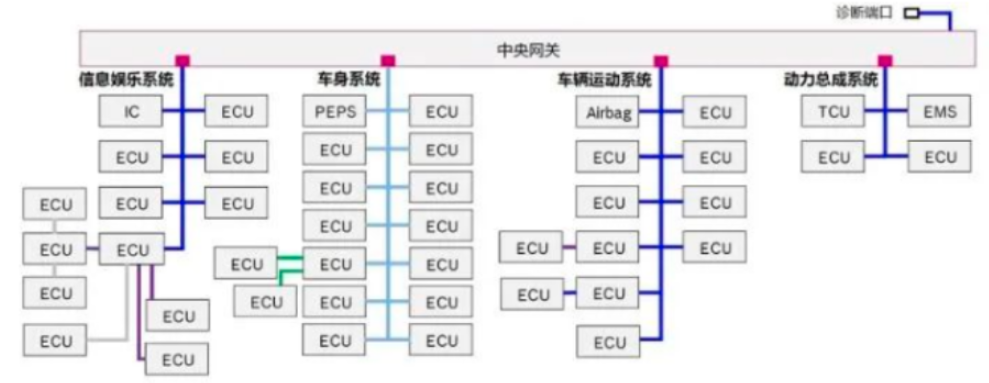
比如汽车Tier1巨头博世,最初将汽车电子电气架构分为5个域,包括动力域、底盘域、车身域、座舱域、自动驾驶域,这五个域通过中央网关进行连接。
当然往为了进一步简化系统结构,也有厂商进一步进行融合,将动力域、底盘域、车身域合并成一个域,变成车控域、智能驾驶域、智能座舱域的三域架构。比如大众的MEB平台和华为Hi智能汽车解决方案中的CC架构。
其中华为的CC架构采用了分布式网关,通过多个网关组成环网,由于一个域控制器可以连接多个网关,因此在单个网关故障的情况下,通过环网依然可以提供正常的数据传输等运作,进一步提高了系统的安全性和可靠性。
以上是通过功能区分的汽车域架构,但在实际应用过程中,可能会发现,同一个域中的不同功能,可能在车头与车尾都有分布,这就会导致线束长度无法进一步缩短。所以特斯拉在2
016年采用了分区的域架构,将左右车身,以及前车身部分分成三个域控制器,以就近原则来降低线束总长度。
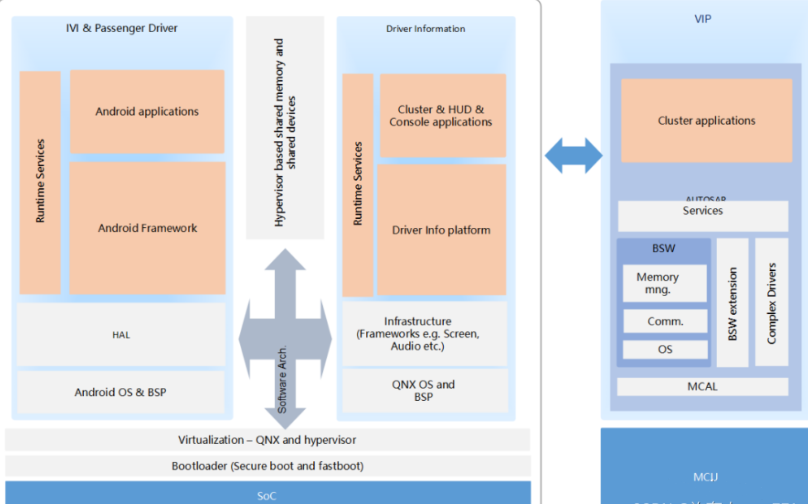
而零跑在今年8月初,推出了“四叶草”架构,将智能座舱、智能驾驶、整车控制、动力四个域合并到一个中央域控制器中,真正完成一个“盒子”控制全车。四叶草平台的中央域控制器是由SoC和MCU两个主板组成,SoC方面兼容高通8295/8155方案,控制智能座舱、智能驾驶域;MCU方面采用恩智浦S32G,负责动力、车身控制等方面。
这种整车电子电气架构集中到一个中央集成域控制器中的方案,也是目前业界主流的发展方向。
自动驾驶域控成车企自研首要高地
由于自动驾驶对软件和硬件的高度耦合,所以对于自动驾驶领域而言,做算法的公司如果要更好地将方案推广出去,就必须配合相应的自动驾驶域控制器。具备全栈自研的能力,才可以在硬件与软件之间同步进行优化,实现更加深度的配合,提供更好的升级迭代能力。
而新势力车企因为在自动驾驶上选择自研路线,实际上,包括自研自动驾驶域控,甚至是自研ADAS芯片,都是将自动驾驶放在品牌核心竞争力的车企,需要选择全栈自研所要涉及的领域。
比如蔚来从NT1平台开始,其自动驾驶域控制器就开始采用公司设计电路和结构,委托代工生产硬件的模式。蔚来副总裁白剑还曾表示,蔚来与代工厂深度合作,在代工模式下,产线的测试夹具、测试软件开发都是自研后导入代工厂使用。
当然,包括小鹏、理想等新势力车企,都选择了自动驾驶域控制器全栈自研的路线,这是相比传统车企来说,差异化的体现。
另一方面,自动驾驶公司同样热衷于自研自动驾驶域控制器。因为对于车企而言,自动驾驶方案的易用性是很重要的部分,这决定了自动驾驶公司需要提供完善的交钥匙方案,当然其中就包括传感器、域控制器等等。
小马智行是第一家选择自研域控制器的L4自动驾驶公司,另外宏景智驾、毫末智行、佑驾创新、禾多科技、图森未来等自动驾驶公司都已经推出了自研域控制器。
小结:
由于集中式汽车电子电气架构对于软硬件方面的融合要求,域控制器自研对于智能化发展较快的车企而言几乎是一条必经之路。除了自动驾驶域控制器之外,蔚来还率先自研了底盘域控制器,并实现量产搭载。汽车踏入智能化时代,域控制器自研或许会成为越来越多车企的选择。
-
汽车
+关注
关注
13文章
3493浏览量
37249 -
域控制器
+关注
关注
0文章
248浏览量
2638
发布评论请先 登录
相关推荐
为何越来越多的应用场景都会用到温湿度控制器?

Arm Cortex-R82AE赋能高性能区域控制器设计
车企自产零部件趋势加剧,供应商面临新挑战
国产车企自研智驾芯片加速落地,蔚来小鹏等领跑赛道
车企自研功率模块加速落地,国产SiC MOSFET和代工厂迎新机会
汽车区域控制器架构趋势下,这三类的典型电路设计正在改变

汽车区域控制器架构趋势下的SmartFET应用
经纬恒润全栈自研底盘域控制器量产

浅析ADAS域控制器技术
座舱域控制器硬件架构方案:SoC + MCU
关于域控制器的基础知识分享
为什么越来越多的企业会用到 NTP网络时间服务器






 工商网监
工商网监
评论