 在HMI设备上进行初始值采集和条件分析所涉及的工作原理是什么?
在HMI设备上进行初始值采集和条件分析所涉及的工作原理是什么?
简介
按照定义的顺序执行 PLC 代码视图中的条件分析评估。
本示例介绍了在 HMI 设备上进行初始值采集和条件分析所涉及的工作原理。
初始值采集 在用户程序中记录自动和手动模式下的互锁信号状态,并已组态以下操作数:
| 符号名称 | 注释 | 含义 |
|---|---|---|
| Tag_1 | 自动模式 | 自动模式 |
| Tag_2 | Interlock_1 | 第一个互锁 |
| Tag_3 | 电机开启 | 接通电机 |
| Tag_4 | Interlock_2 | 第二个互锁 |
| Tag_5 | 手动模式 | 手动模式 |
| Tag_6 | 手动开关 | 手动按钮 |
操作数的信号状态按照以下顺序进行记录,并被写入到 DWORD 中: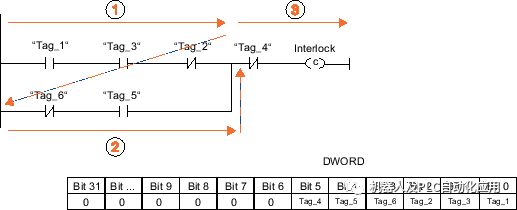
出错时的条件分析 互锁出错时,请使用组态的按钮从错误消息跳转至 PLC 代码视图,并查看程序中的错误位置。
由于已激活了初始值采集,因此会自动在 PLC 代码视图中随条件分析一起显示初始值视图。
触发错误的操作数以相应颜色突出显示。
只能根据初始值采集的顺序,在 PLC 代码视图的符号表中查看错误操作数的名称、绝对地址和注释。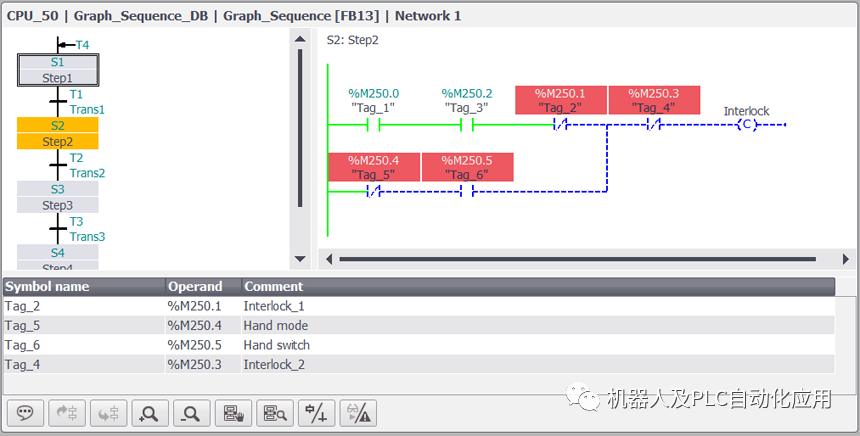
可选择切换至手动模式并启用条件分析。
这样即可在详细视图中查看错误触发网络,即使当时已更正错误情况。
互锁编程的优化 在本示例中,为快速明确因光柵而导致出错,最好先编程操作数 Tag_4。
有关打开光柵的信息,随即会显示在符号表的第一行中。
以下示例显示了针对“PLC 代码视图”(PLC code view) 对象的最佳视图的编程: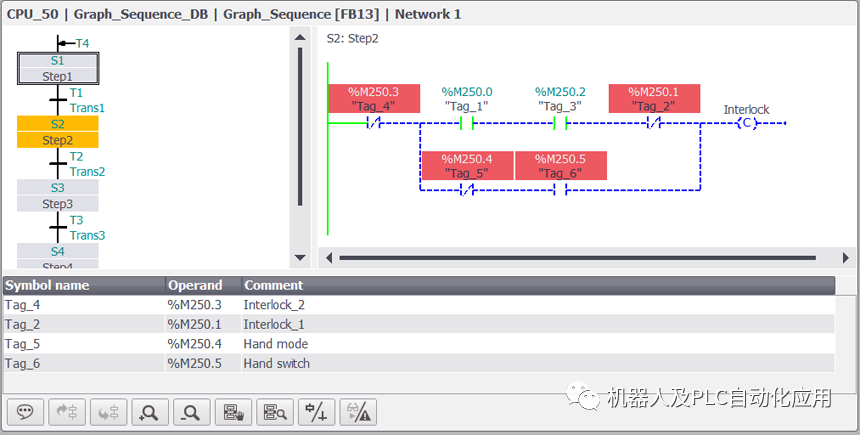
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5010文章
13271浏览量
463027 -
触发器
+关注
关注
14文章
2000浏览量
61129 -
HMI系统
+关注
关注
0文章
20浏览量
1025
原文标题:西门子博途:条件分析顺序的示例
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LTC2943在初始化的时候要如何确定Qlsb的初始值呢?
最近公司在使用一款LTC2943的库仑计,但是在初始化的时候要如何确定Qlsb的初始值呢?或者可以提供一个STM32作为MCU的例程最好。
发表于 01-04 06:47
抑制初始值的警告
我将一些寄存器的初始值用作永不改变的“常量”。另外,我使用$ readmemb以传统方式初始化内存。 这导致“警告:HDLC编译器:872 ......:使用XXX的初始值,因为它从未被分配。有可能
发表于 02-25 11:10
请问如何指定EEPROM的初始值?
:(1324).ier“eeprom”忽略,事实上数据没有写入EEPROM。在情况2中(在任何情况下我都不想使用它,因为我需要指定超过8个字节的初始值。有人能告诉我我在做什么吗?ON,我如何指定EEPROM的初始值?非常感谢您的
发表于 09-17 07:32
换路定律及初始值的确定
换路定律及初始值的确定:3.2 换路定律及初始值的确定3.2.1 换路定律通常,我们把电路中开关的接通、断开或电路参数的突然变化等统称为“换路”。我们研究的是换路后电
发表于 05-10 00:04
•30次下载
浅析MCU内部的RAM上电之后的初始值相关问题
首先我们明确一个问题,我们都知道,根据RAM的特性,MCU每次上电之后RAM里面的值是随机的。也就是说RAM上电后的初始值可以是0xAA,也可以是0x55,也可以是其它任何的值,这个都是正常的。明确了这个基本原理之后,我们来看一
发表于 01-05 08:59
•6314次阅读
教你们怎么去设定寄存器的初始值
对于寄存器,如果没有明确指定其初始值,Vivado会根据其类型(FDCE/FDRE/FDPE/FDRE)设定合适的初始值。有些工程师喜欢使用复位信号,对所有的寄存器进行上电复位,使其在

如何保证MCU上电后RAM的初始值唯一
由于工作的原因,笔者经常接到工程师询问MCU内部的RAM上电之后的初始值到底是什么,有什么特性和规律。今天笔者就以设计过程中遇到的几个问题与大家做一个交流。首先明确一个问题,我们都知道,根据RAM
发表于 11-05 19:05
•4次下载

如何保证MCU上电后RAM的初始值唯一
由于工作的原因,笔者经常接到工程师询问MCU内部的RAM上电之后的初始值到底是什么,有什么特性和规律。今天笔者就以设计过程中遇到的几个问题与大家做一个交流。
首先明确一个问题,我们都知道,根据RAM
发表于 02-10 12:01
•1次下载





 工商网监
工商网监
评论