 简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理
激光雷达是一种高精度的探测装置,可以在三维空间中进行高精度的距离测量和空间信息采集。激光雷达的主要结构包括光源、扫描系统、接收系统和信号处理系统。其主要由三个部分组成: 光源系统、探测器和信号处理部分。接下来,我们将从结构原理、分类及特点和 TIM320激光雷达的工作原理三个方面进行详细的分析。
激光雷达的结构原理
光源系统是激光雷达的基本组成部分,其主要负责发射激光束。通常情况下,激光雷达所使用的光源为固态激光器,其优点是能快速地调整发射的激光束频率和功率,使其适应不同工作环境的需求。同时,激光雷达的探测范围与激光源的功率与频率有直接关系。
接着是扫描系统,主要是指激光雷达所采用的扫描机构。其作用是可以通过旋转或者移动溜的方式改变发射激光束的方向,实现对所选取区域的全方位、全角度扫描,从而获取连续的三维空间信息。激光雷达的扫描机构有多种形式,如旋转镜、互补式、Flash式等。其中旋转镜式激光雷达是目前使用最为广泛的一种,其主要原理是利用电机带动光学设备在水平方向上旋转,扫描出360度的视场,实现对区域内的三维空间进行高精度测量。
接下来是接收系统。其主要功能是接收反射回来的光束,并将接收到的信号转化成数字或者vwin
信号进行处理。激光雷达采用的主要接收器是光电二极管,并配合滤光镜、对焦镜等进行信号滤波和信号提取,从而实现对反射回来的光信号进行精细的测量,进而获取精确的空间信息。
信号处理系统是激光雷达最为关键的一个部分。其主要功能是将接收到的反射信号进行数字信号处理,并将处理结果输出至外部设备。激光雷达采用的主要信号处理器是FPGA芯片,并通过算法对处理后的数据进行滤波、降噪、匹配等操作,获得高清晰度的点云数据。同时,激光雷达还可对输出结果进行处理,如进行数据标定、变换等,以满足不同领域中的应用需求。
激光雷达的分类及特点
从工作原理和应用领域来看,激光雷达可以分为离散式激光雷达和连续式激光雷达两大类。
离散式激光雷达工作原理是透过旋转镜等机械扫描机构将激光光束以点状扫描的方式发射出去,反射后的信号传输回接收单元进行处理。它的主要优点是测距精度高、探测距离远、点云数据分辨率高等。在车辆驾驶辅助、智能制造等领域都有较为广泛的应用。
连续式激光雷达则采用的是非机械扫描的技术,以光束照射和调制的方式进行探测,并将不同距离处的反射点统计到一起输出成连续式的点云数据。这种类型的激光雷达具有探测速度快、动态响应能力好等特点,可以广泛应用于地图构建、无人驾驶等方面。
TIM320激光雷达的工作原理
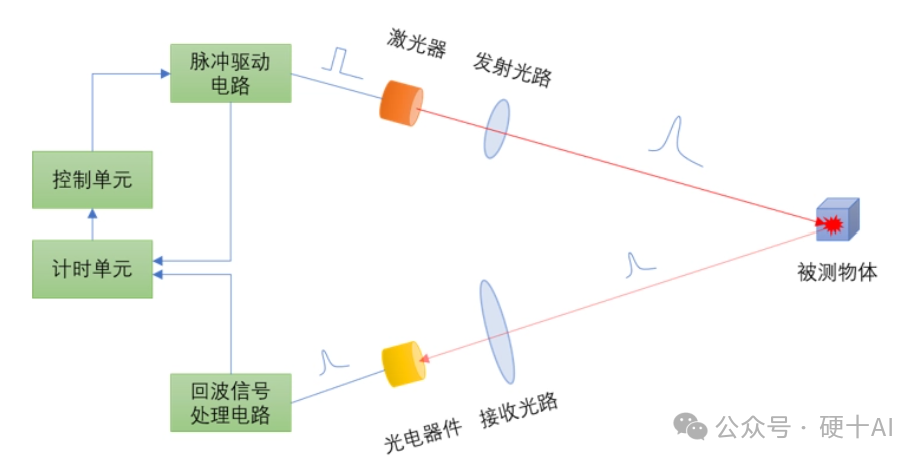
以TIM320激光雷达为例,它的工作原理是将发射激光束通过旋转镜反射到周围环境中,反射的光束经过接收单元采集并通过信号处理器处理后,输出高精度的三维点云数据。
TIM320主要使用的是固态激光器,其工作频率为10Hz,激光波长为905nm,可以在雨雪、雾等环境中保持高精度的测量效果。由于其探测范围较大,可测量的距离达到了50米,因此TIM320激光雷达主要被应用于无人驾驶、无人船和智能交通等领域。
TIM320激光雷达还具有高精度测量、点云分辨率高、抗干扰能力强等特点,能够应对复杂多变的环境,为工业领域带来了更高的生产效率和安全性。
总结
激光雷达已经成为现代工程领域中不可缺少的探测仪器。通过对激光雷达的结构原理、分类及特点和TIM320激光雷达的工作原理进行详细分析,可以发现激光雷达使用广泛,并且在各领域中都有广泛的应用前景。 随着科技的不断进步和市场需求的不断增加,激光雷达技术也会不断创新和发展,未来激光雷达的应用领域会更加广泛,并为生产和生活带来更多的便利和创新。
-
激光器
+关注
关注
17文章
2514浏览量
60330 -
信号处理器
+关注
关注
1文章
254浏览量
25270 -
激光雷达
+关注
关注
968文章
3967浏览量
189814
发布评论请先 登录
相关推荐
激光雷达,明年要降价至200美元

激光雷达会伤害眼睛吗?

激光雷达的工作原理和分类
激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
激光雷达技术的发展趋势
光学雷达和激光雷达的区别是什么
一文看懂激光雷达

基于FPGA的激光雷达控制板

硅基片上激光雷达的测距原理

激光雷达的探测技术介绍 机载激光雷达发展历程

激光雷达的应用场景
华为详细解读激光雷达
激光雷达LIDAR基本工作原理






 工商网监
工商网监
评论