 CVPR上的新顶流:BEV自动驾驶感知新范式
CVPR上的新顶流:BEV自动驾驶感知新范式
在高级别自动驾驶功能应用中,车辆的智驾系统必须能够解决corner case,即罕见却又无法完全避免的极端场景。这些场景数据样本较少,一旦模型不能有效识别,可能引发严重的安全事故。
前段时间,百度在Create大会上的辅助驾驶板块发布了一个挺硬核的内容,或许能有效解决corner case,车路一体的BEV感知方案——UniBEV。
BEV自动驾驶感知好比一个从高处统观全局的“上帝视角”,将三维环境信息投影到二维平面,以俯视视角展示环境中的物体和地形。在路径规划、障碍物检测、自动驾驶决策等方面,BEV感知都展现出了其独特的优势。
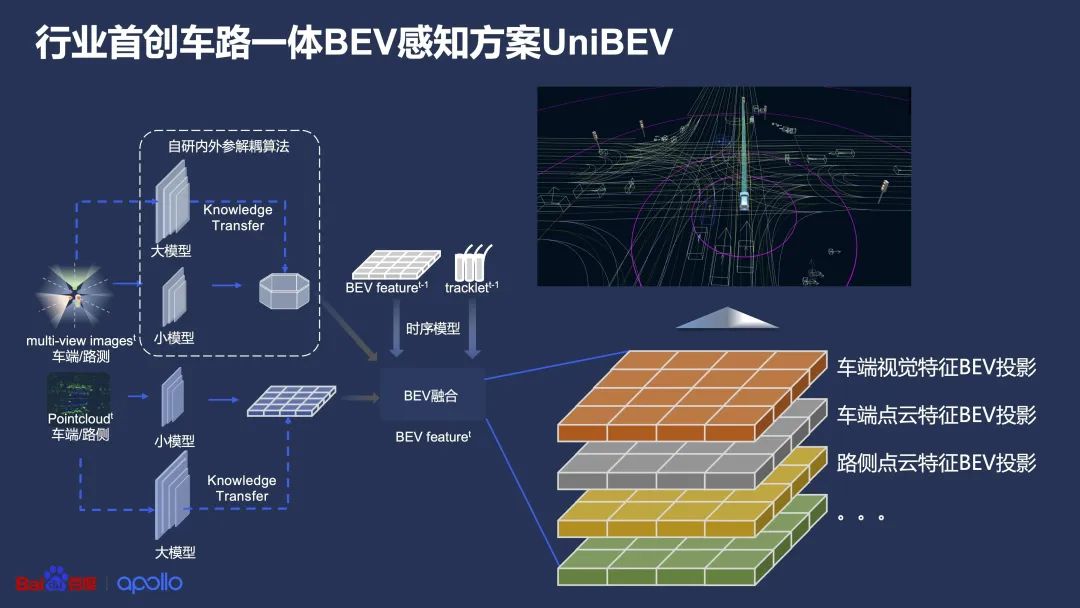
车路一体的BEV感知方案——UniBEV
路径规划:BEV感知可以将复杂的道路信息简化为一系列的路径点,使得路径规划更加简单、准确。
障碍物检测:BEV感知能够清晰地展示出车辆周围的障碍物,包括车辆、行人、道路标志等,使得障碍物的检测和识别更加准确。
自动驾驶决策:BEV感知可以为自动驾驶系统提供全面的环境信息,帮助系统做出更加智能的决策。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网 网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 检测
+关注
关注
5文章
4288浏览量
91012 - 自动驾驶
+关注
关注
780文章
13384浏览量
164831
原文标题:CVPR上的新顶流:BEV自动驾驶感知新范式
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
聊聊自动驾驶离不开的感知硬件
自动驾驶飞速发展,绕不开
感知、决策和控制决策的经典框架,而
感知作为
自动驾驶汽车“感官”的重要组成部分,决定了
自动驾驶系统对环境的理解和反应能
FPGA在自动驾驶领域有哪些优势?
领域的主要优势: 高性能与并行处理能力: FPGA内部包含大量的逻辑门和可配置的连接,能够同时处理多个数据
流和计算任务。这种并行处理能力使得FPGA在处理
自动驾驶中复杂的图像识别、传感器数据处理等
发表于07-29 17:11
FPGA在自动驾驶领域有哪些应用?
是FPGA在
自动驾驶领域的主要应用: 一、
感知算法加速 图像处理:
自动驾驶中需要通过摄像头获取并识别道路信息和行驶环境,这涉及到大量的图像处理任务。FPGA在处理图像
上的运算速度快,可
发表于07-29 17:09
华为小米自动驾驶Occupancy Network对决
2023年6月计算机视觉学术圈
CVPR举办两场
自动驾驶研讨会,一个是端到端
自动驾驶研讨会 (End-to-End Autonomous Driving Workshop),另一个是视觉中心
自动

未来已来,多传感器融合感知是自动驾驶破局的关键
的架构,预计未来许多智能
驾驶团队都会引入“占用网络”来提升系统能力。多维像素的应用前景非常广阔。昱感微的融合
感知技术+
BEV+Transformer+占用网格有望成为L3/L4级
自动驾驶
发表于04-11 10:26
黑芝麻智能开发多重亮点的BEV算法技术 助力车企高阶自动驾驶落地
随着视觉算法的演进,
BEV(Bird's-Eye-View Perception)
感知算法成为主机厂和
自动驾驶公司发力城市场景的核心技术之一,
BEV
BEV和Occupancy自动驾驶的作用
BEV是Bird's Eye View 的缩写,意为鸟瞰视图。在
自动驾驶领域,
BEV是指从车辆上方俯瞰的场景视图。
BEV图像可以提供车辆周围环境的完整视图,包括车辆前方、
发表于01-17 12:33
•
593次阅读

顶刊TPAMI最全综述!深入自动驾驶BEV感知的魔力!
BEV
感知的主要工作。在输入模态下," L "为LiDAR," SC "为单相机," MC "为多相机," T "为时

自动驾驶领域中,什么是BEV?什么是Occupancy?
BEV是Bird's Eye View 的缩写,意为鸟瞰视图。在
自动驾驶领域,
BEV是指从车辆上方俯瞰的场景视图。

自动驾驶感知算法提升处理策略
现代
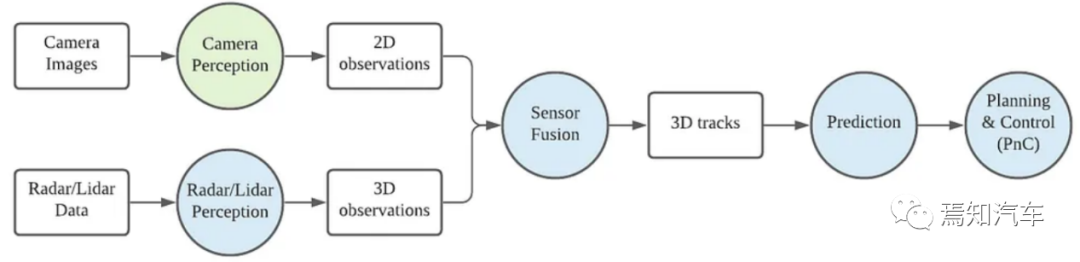
自动驾驶系统的特点是按顺序排列的模块化任务,传统的方法是基于标准的
感知-规划-控制这种序列式架构的主流处理方式。即首先将
感知信息处理成人类可以理解的语义信息和道路交通信息,然后基于常态化知识
Nullmax揭秘BEV-AI技术架构加速量产方案演进
12月19日,Nullmax首席科学家成二康博士应邀出席2023全球
自动驾驶峰会(GADS 2023),在
自动驾驶
BEV
感知技术论坛
上发表《
LabVIEW开发自动驾驶的双目测距系统
达到950以上,而在其他较弱纹理区域也能维持在900左右。误差率低至5%以下,甚至在特征点明显的标志物
上可达到2%左右。 基于LabVIEW的双目测距系统在
自动驾驶中具有广泛的应用前景,它可以为车辆提供
发表于12-19 18:02
利用TransformerBEV解决自动驾驶Corner Case的技术原理
BEV是一种将三维环境信息投影到二维平面的方法,以俯视视角展示环境中的物体和地形。在
自动驾驶领域,
BEV可以帮助系统更好地理解周围环境,提高
感知和决策的准确性。在环境

【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
是一种模型,旨在同时执行
自动驾驶场景中的不同任务,同时实现优异的性能和效率。这些任务包括对象检测、分割、车道检测、可行驶区域分割和深度估算,这些都是
自动驾驶
感知模块的重要组成部分。 三、代码实现
发表于09-26 16:43





 工商网监
工商网监
评论