 工业机器人中常用的减速器有哪几种?区别是什么?
工业机器人中常用的减速器有哪几种?区别是什么?
减速器是三个重要的工业机器人部件之一,它可以使伺服电机以适当的速度运行,并可以准确地将速度降低到工业机器人每个部件所需的速度,同时提高输出扭矩。与普通减速器相比,工业机器人关节减速器应具有体积小、重量轻、功率大、控制方便等特点。工业机器人通常执行重复操作以执行相同的工艺流程。为了使工业机器人能够可靠地执行过程任务和过程质量,对工业机器人重复定位的精度和定位精度提出了高要求。因此,有必要使用减速器来提高和确保工业机器人的精度。工业机器人中常用的减速器有哪几种?区别是什么?
工业机器人常用减速器类型
1.RV减速器
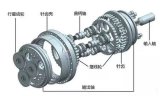
RV减速器是由传统摆线齿轮箱和行星齿轮箱发展而来的新型传动机构。它具有结构紧凑、传动大、使用寿命长、精度稳定、效率高等优点。它已广泛应用于关节式工业机器人。工业机器人伺服电机的动力通过减速器输入轴的齿轮箱传递,从而使输出轴的大齿轮联动,达到减速的目的。大小齿轮的传动比也是传动比。
RV减速器工作原理:在RV减速器壳体的内圈安装一个圆柱销。RV传动装置的偏心运动会导致销和RV传动装置组装和连接。同时,多个RV齿轮箱抓取,增加了负载能力。由于RV齿数比销少一个,当偏心轴旋转一圈时,当壳体固定时,RV齿轮和输入轴沿相同方向旋转一个齿。出口可以是壳体或传动轴。当壳体固定时,传动轴为输出,输出方向相同。当传动轴固定时,壳体就是输出,输出方向正好相反。
2.谐波减速器
谐波减速器是低负载工业机器人常用的一种新型齿轮减速器传动机构。它由固定的刚性轮、柔性轮和波浪发生器组成,其中刚性轮的齿数略高于柔性轮的齿。谐波减速器具有传动大、体积小、部分零件、传动效率高等优点,这种单台传动比可达50-4000,传动效率可达92%-96%。谐波减速器由三个主要部件组成:波浪发生器、柔性传动装置和刚性传动装置。波浪发生器将柔性传输变为可调节的弹性变形和刚性传输网格,用于运动和电力传输。变速器可以实现高减速比,但其负载、刚度和寿命不如RV,因此多用于轻载机器人。
谐波减速器工作原理:谐波减速器采用柔性齿轮箱产生可调节的弹性变形波,使内部刚性齿轮箱与柔性齿轮箱之间的相对阶梯齿传递动力,实现减速目标。这种类型的变速器与普通变速器有根本不同,在网格理论、集合计算和结构设计方面有自己的特点。
3.行星减速器
行星减速器中的行星是围绕太阳保护装置旋转的三个行星齿轮。行星减速器是一种多功能减速器,也称为伺服行星减速器,可用于降低工业机器人电机的速度,同时增加输出扭矩。行星减速器具有体积小、重量轻、噪音低、寿命长、承载能力大、运行平稳等优点。
行星减速器工作原理:当太阳能变速器在发动机的动力下旋转时,将行星齿轮箱连接到行星齿轮箱会导致旋转。同时,由于行星齿轮箱的另一侧将主体连接到内壁上的空内部齿轮箱,行星齿轮箱通过旋转力沿旋转方向滚动,形成围绕太阳变速器的“旋转”运动。
-
机器人
+关注
关注
211文章
28379浏览量
206908 -
工业
+关注
关注
3文章
1824浏览量
46517 -
减速器
+关注
关注
7文章
393浏览量
23244
发布评论请先 登录
相关推荐

labview中常用的程序结构有哪几种
工业机器人视觉技术的应用分为哪几种?
步进电机在工业机器人中的应用
断路器有哪几种
RV减速器和谐波减速器的原理和优劣势
工业机器人减速器行业的十年变革
脉冲信号是指什么?常见的脉冲波形有哪几种?分别是什么?
差速器有什么用?差速器和主减速器区别是什么?
什么是串行端口?有哪几种分类?
2024年工业机器人减速器市场研究报告





 工商网监
工商网监
评论