 OpenHarmony:全流程讲解如何编写Watchdog平台驱动以及应用程序
OpenHarmony:全流程讲解如何编写Watchdog平台驱动以及应用程序
1、程序介绍
本程序是基于OpenHarmony标准系统编写的平台驱动案例:Watchdog
由于开发板只有1个Watchdog,且已被OpenHarmony内部占用,本案例只能让读者熟悉Watchdog相关接口以及应用,无法应用呈现。
2、基础知识
2.1、Watchdog简介
看门狗(Watchdog),又称看门狗计时器(Watchdog timer),是一种硬件计时设备。一般有一个输入、一个输出,输入叫做喂狗,输出连接到系统的复位端。当系统主程序发生错误导致未及时清除看门狗计时器的计时值时,看门狗计时器就会对系统发出复位信号,使系统从悬停状态恢复到正常运作状态。
系统正常工作的时候,每隔一段时间输出一个信号到喂狗端,给看门狗清零,这个操作就叫做喂狗。如果超过规定的时间不喂狗,看门狗定时超时,就会给出一个复位信号到系统,使系统复位。
2.2、Watchdog驱动开发
2.2.1、Watchdog驱动开发接口
为了保证上层在调用Watchdog接口时能够正确的操作Watchdog控制器,核心层在//drivers/hdf_core/framework/support/platform/include/watchdog/watchdog_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
WatchdogMethod定义:
struct WatchdogMethod { int32_t (*getStatus)(struct WatchdogCntlr *wdt, int32_t *status); int32_t (*setTimeout)(struct WatchdogCntlr *wdt, uint32_t seconds); int32_t (*getTimeout)(struct WatchdogCntlr *wdt, uint32_t *seconds); int32_t (*start)(struct WatchdogCntlr *wdt); int32_t (*stop)(struct WatchdogCntlr *wdt); int32_t (*feed)(struct WatchdogCntlr *wdt); int32_t (*getPriv)(struct WatchdogCntlr *wdt); // 【可选】如果WatchdogCntlr中的priv成员存在,则按需实例化 void (*releasePriv)(struct WatchdogCntlr *wdt); // 【可选】};
WatchdogMethod成员的钩子函数功能说明:

2.2.2、Watchdog驱动开发步骤
Watchdog模块适配HDF框架包含以下四个步骤:
实例化驱动入口。
配置属性文件。
实例化Watchdog控制器对象。
驱动调试。
我们以///drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c为例(该watchdog驱动是建立于Linux Watchdog子系统基础上创建)。
2.2.2.1、驱动实例化驱动入口
驱动入口必须为HdfDriverEntry(在 hdf_device_desc.h 中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
Watchdog驱动入口开发参考:
struct HdfDriverEntry g_hdfWdtchdog = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_WATCHDOG", // 【必要且与HCS文件中里面的moduleName匹配】 .Bind = HdfWdtBind, // 见Bind参考 .Init = HdfWdtInit, // 见Init参考 .Release = HdfWdtRelease, // 见Release参考};
HDF_INIT(g_hdfWdtchdog); // 调用HDF_INIT将驱动入口注册到HDF框架中
2.2.2.2、配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode描述。deviceNode信息与驱动入口注册相关。本例以一个Watchdog控制器为例,如有多个器件信息,则需要在device_info文件增加对应的deviceNode描述。器件属性值与核心层WatchdogCntlr成员的默认值或限制范围有密切关系,比如Watchdog设备号,需要在watchdog_config.hcs文件中增加对应的器件属性。
在//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs文件中添加deviceNode描述:
device_watchdog :: device { // 设备节点 device0 :: deviceNode { // 驱动的DeviceNode节点 policy = 2; // policy字段是驱动服务发布的策略,如果需要面向用户态,则为2 priority = 20; // 驱动启动优先级 permission = 0644; // 驱动创建设备节点权限 moduleName = "HDF_PLATFORM_WATCHDOG"; // 【必要】用于指定驱动名称,该字段的值必须和驱动入口结构的moduleName值一致 serviceName = "HDF_PLATFORM_WATCHDOG_0"; // 【必要】驱动对外发布服务的名称,必须唯一。 deviceMatchAttr = "rockchip_rk3568_watchdog_0"; // 【必要】用于配置控制器私有数据,必须和驱动私有数据配置表watchdog_config.hcs中的match_attr值保持一致。 }}
在//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/rk3568_watchdog_config.hcs文件配置器件属性,其中配置参数如下:
root { platform { watchdog_config { template watchdog_device { serviceName = "HDF_PLATFORM_WATCHDOG_0"; match_attr = ""; id = 0; }
device_0x12050000 :: watchdog_device { id = 0; match_attr = "rockchip_rk3568_watchdog_0"; } } }}
2.2.2.3、实例化Watchdog控制器对象
完成驱动入口注册之后,下一步就是以核心层WatchdogCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化WatchdogCntlr成员WatchdogMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind,Init,Release)。
WatchdogCntlr成员钩子函数结构体WatchdogMethod的实例化,其他成员在Init和Bind函数中初始化。
// 钩子函数实例化static struct WatchdogMethod g_wdtMethod = { .getStatus = WdtAdapterGetStatus, // 获取看门狗状态 .start = WdtAdapterStart, // 启动看门狗 .stop = WdtAdapterStop, // 停止看门狗 .setTimeout = WdtAdapterSetTimeout, // 设置看门狗超时时间 .getTimeout = WdtAdapterGetTimeout, // 获取看门狗超时时间 .feed = WdtAdapterFeed, // 喂狗函数 .getPriv = WdtOpenFile, .releasePriv = WdtAdapterClose,};
2.2.2.4、驱动调试
建议先在Linux下修改确认,再移植到OpenHarmony。
2.3、Watchdog应用开发
看门狗(Watchdog),又称看门狗计时器(Watchdog timer),是一种硬件计时设备。一般有一个输入、一个输出,输入叫做喂狗,输出连接到系统的复位端。当系统主程序发生错误导致未及时清除看门狗计时器的计时值时,看门狗计时器就会对系统发出复位信号,使系统从悬停状态恢复到正常运作状态。
Watchdog接口定义了看门狗操作的通用方法集合,包括:
打开/关闭看门狗设备
启动/停止看门狗设备
设置/获取看门狗设备超时时间
获取看门狗设备状态
喂狗
2.3.1、接口说明
Watchdog模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/watchdog_if.h。
Watchdog驱动API接口功能介绍如下所示:
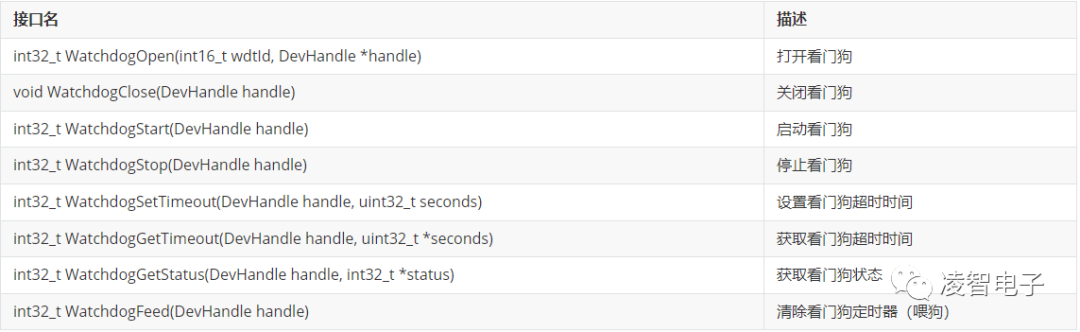
(1)WatchdogOpen
在操作看门狗之前,需要调用WatchdogOpen打开看门狗设备,一个系统可能有多个看门狗,通过看门狗ID号来打开指定的看门狗设备。
DevHandle WatchdogOpen(int16_t wdtId, DevHandle *handle);
WatchdogOpen参数定义如下:

WatchdogOpen返回值定义如下:

(2)WatchdogClose
当所有操作完毕后,调用WatchdogClose关闭打开的看门狗设备。
void WatchdogClose(DevHandle handle);
WatchdogClose参数定义如下:

(3)WatchdogStart
启动看门狗。
int32_t WatchdogStart(DevHandle handle);
WatchdogStart参数定义如下:

WatchdogStart返回值定义如下:

(4)WatchdogStop
停止看门狗。
int32_t WatchdogStop(DevHandle handle);
WatchdogStop参数定义如下:

WatchdogStop返回值定义如下:

(5)WatchdogSetTimeout
设置超时时间。
int32_t WatchdogSetTimeout(DevHandle *handle, uint32_t seconds);
WatchdogSetTimeout参数定义如下:

WatchdogSetTimeout返回值定义如下:

(6)WatchdogGetTimeout
获取超时时间。
int32_t WatchdogGetTimeout(DevHandle *handle, uint32_t *seconds);
WatchdogGetTimeout参数定义如下:

WatchdogGetTimeout返回值定义如下:

(7)WatchdogGetStatus
获取看门狗状态。
int32_t WatchdogGetStatus(DevHandle handle, int32_t *status);
WatchdogGetStatus参数定义如下:

WatchdogGetStatus返回值定义如下:

(8)WatchdogFeed
喂狗。
int32_t WatchdogFeed(DevHandle handle);
WatchdogFeed参数定义如下:

WatchdogFeed返回值定义如下:

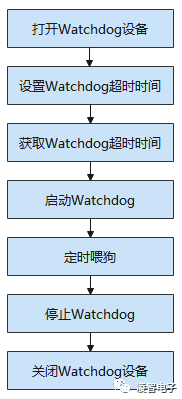
2.2.2、开发流程
使用Watchdog设备的一般流程如下图所示:
3、程序解析
3.1、准备工作
无
3.2、Linux内核解析
3.2.1、创建Linux内核Git
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.2、修改设备树Watchdog配置
修改//arch/arm64/boot/dts/rockchip/rk3568.dtsi(即该目录是指已打Patch后的Linux内核,不是OpenHarmony主目录),定义Watchdog启用,具体如下所示:
wdt: watchdog@fe600000 { compatible = "snps,dw-wdt"; reg = <0x0 0xfe600000 0x0 0x100>; clocks = <&cru TCLK_WDT_NS>, <&cru PCLK_WDT_NS>; clock-names = "tclk", "pclk"; interrupts = ; status = "okay";};
该部分为默认启动看门狗。
3.2.3、创建内核patch
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.4、替换OpenHarmony的内核patch
将制作出的kernel.patch替换到//kernel/linux/patches/linux-5.10/rk3568_patch/kernel.patch即可。
3.2.5、开启watchdog内核配置
在//kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig(即该目录为OpenHarmony主目录),开启watchdog的hdf驱动,具体如下所示:
CONFIG_DRIVERS_HDF_PLATFORM_WATCHDOG=y
3.3、OpenHarmony配置树配置
3.3.1、device_info.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs已定义好,具体如下:
device_watchdog :: device { device0 :: deviceNode { policy = 2; priority = 20; permission = 0644; moduleName = "HDF_PLATFORM_WATCHDOG"; serviceName = "HDF_PLATFORM_WATCHDOG_0"; deviceMatchAttr = "rockchip_rk3568_watchdog_0"; }}
注意:
device0:watchdog一般只需要1个设备节点即可。
policy:policy字段是驱动服务发布的策略,如果需要面向用户态,则为2。
moduleName:用于指定驱动名称,该字段的值必须和驱动入口结构的moduleName值一直,表示该节点对应。于//drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c,该驱动是对接Linux Watchdog子系统。
deviceMatchAttr:用于配置控制器私有数据,必须和驱动私有数据配置表watchdog_config.hcs中的match_attr值保持一致
3.3.2、Watchdog_config.hcs
在//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/watchdog_config.hcs,具体内容如下:
root { platform { watchdog_config { template watchdog_device { serviceName = "HDF_PLATFORM_WATCHDOG_0"; match_attr = ""; id = 0; }
device_0x12050000 :: watchdog_device { id = 0; match_attr = "rockchip_rk3568_watchdog_0"; } } }}
注意:
id:表示Linux系统中watchdog的设备号(即/dev/watchdog0)。
match_attr:必须与之前的device_info.hcs一致。
3.4、OpenHarmony Watchdog平台驱动
在//drivers/hdf_core/adapter/khdf/linux/platform/watchdog/watchdog_adapter.c已编写对接Linux Watchdog驱动的相关代码,具体内容如下:
struct HdfDriverEntry g_hdfWdtchdog = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_WATCHDOG", .Bind = HdfWdtBind, .Init = HdfWdtInit, .Release = HdfWdtRelease,};
HDF_INIT(g_hdfWdtchdog);
该部分代码不细述,感兴趣的读者可以去详读。
3.5、应用程序
3.5.1、Watchdog_test.c
Watchdog相关头文件如下所示:
#include "watchdog_if.h" // watchdog标准接口头文件
主函数负责看门狗相关操作。
其中,打开看门狗操作源代码具体如下:
// 打开看门狗设备ret = WatchdogOpen(m_watchdog_id, handle);if (ret != 0) { PRINT_ERROR("WatchdogOpen failed and ret = %d\n", ret); goto out;}if (handle == NULL) { PRINT_ERROR("WatchdogOpen failed and handle is null\n"); goto out;}......
设置和获取看门狗超时时间操作源代码如下所示:
// 设置超时时间ret = WatchdogSetTimeout(handle, m_watchdog_timeout);if (ret != 0) { PRINT_ERROR("WatchdogSetTimeout failed and ret = %d\n", ret); goto out;}printf("WatchdogSetTimeout Successful and Watchdog timeout = %d\n", m_watchdog_timeout);
// 获取超时时间ret = WatchdogGetTimeout(handle, &timeout);if (ret != 0) { PRINT_ERROR("WatchdogGetTimeout failed and ret = %d\n", ret); goto out;}printf("WatchdogGetTimeout Successful and Watchdog timeout = %d\n", timeout);
启动看门狗操作,如下所示:
// 启动看门狗ret = WatchdogStart(handle);if (ret != 0) { PRINT_ERROR("WatchdogStart failed and ret = %d\n", ret); goto out;}
查看看门狗相关状态,如下所示:
// 获取看门狗状态,是否启动status = WATCHDOG_STOP;ret = WatchdogGetStatus(handle, &status);if (ret != 0) { PRINT_ERROR("WatchdogGetStatus failed and ret = %d\n", ret); goto out;}printf("WatchdogGetStatus Successful and Watchdog status = %d, WATCHDOG_START = %d, WATCHDOG_STOP = %d\n", status, WATCHDOG_START, WATCHDOG_STOP);
喂狗和停止喂狗操作,如下所示:
// 喂狗for (i = 0; i < m_watchdog_feed_count; i++) { sleep(m_watchdog_feed); printf("Watchdog: feed number = %d and feed time = %d\n", i, m_watchdog_feed); ret = WatchdogFeed(handle); if (ret != 0) { PRINT_ERROR("WatchdogFeed failed and ret = %d\n", ret); goto out; }}
// 停止喂狗ret = WatchdogStop(handle);if (ret != 0) { PRINT_ERROR("WatchdogStop failed and ret = %d\n", ret); goto out;}
关闭喂狗,如下所示:
WatchdogClose(handle);
3.5.2、BUILD.gn
编写应用程序的BUILD.gn,具体内容如下:
import("//build/ohos.gni")import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_watchdog_test")ohos_executable("rk3568_watchdog_test") { sources = [ "watchdog_test.c" ] include_dirs = [ "$hdf_framework_path/include", "$hdf_framework_path/include/core", "$hdf_framework_path/include/osal", "$hdf_framework_path/include/platform", "$hdf_framework_path/include/utils", "$hdf_uhdf_path/osal/include", "$hdf_uhdf_path/ipc/include", "//base/hiviewdfx/hilog/interfaces/native/kits/include", "//third_party/bounds_checking_function/include", ]
deps = [ "$hdf_uhdf_path/platform:libhdf_platform", "$hdf_uhdf_path/utils:libhdf_utils", "//base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog", ]
cflags = [ "-Wall", "-Wextra", "-Werror", "-Wno-format", "-Wno-format-extra-args", ]
part_name = "product_rk3568" install_enable = true}
3.5.3、参与应用程序编译
编辑//vendor/lockzhiner/rk3568/samples/BUILD.gn,开启编译选项。具体如下:
"b10_platform_device_watchdog/app:rk3568_watchdog_test",
4、程序编译
建议使用docker编译方法,运行如下:
hb set -root .hb set# 选择lockzhiner下的rk3568编译分支。hb build -f
5、运行结果
运行如下:
# rk3568_Watchdog_testWatchdog Params: watchdog id = 0 watchdog timeout sec = 5 watchdog feed sec = 1 watchdog feed count = 5../../vendor/lockzhiner/rk3568/samples/b10_platform_device_watchdog/app/watchdog_test.c, main, 121, error: WatchdogOpen failed and ret = -16WatchdogClose Successful#
注意:
(1)WatchdogOpen返回值为-16,查看//drivers/hdf_core/framework/include/utils/hdf_base.h,具体如下:
/** * @brief Enumerates HDF return value types. */typedef enum { HDF_SUCCESS = 0, /**< The operation is successful. */ HDF_FAILURE = -1, /**< Failed to invoke the OS underlying function. */ HDF_ERR_NOT_SUPPORT = -2, /**< Not supported. */ HDF_ERR_INVALID_PARAM = -3, /**< Invalid parameter. */ HDF_ERR_INVALID_OBJECT = -4, /**< Invalid object. */ HDF_ERR_MALLOC_FAIL = -6, /**< Memory allocation fails. */ HDF_ERR_TIMEOUT = -7, /**< Timeout occurs. */ HDF_ERR_THREAD_CREATE_FAIL = -10, /**< Failed to create a thread. */ HDF_ERR_QUEUE_FULL = -15, /**< The queue is full. */ HDF_ERR_DEVICE_BUSY = -16, /**< The device is busy. */ HDF_ERR_IO = -17, /**< I/O error. */ HDF_ERR_BAD_FD = -18, /**< Incorrect file descriptor. */ HDF_ERR_NOPERM = -19, /**< No permission. */ ......} HDF_STATUS;
如此可知,watchdog被其他程序占用。
-
驱动
+关注
关注
12文章
1838浏览量
85262 -
计时器
+关注
关注
1文章
420浏览量
32689 -
开发板
+关注
关注
25文章
5032浏览量
97371 -
OpenHarmony
+关注
关注
25文章
3713浏览量
16254
发布评论请先 登录
相关推荐
AWTK-WEB 快速入门(1) - C 语言应用程序

迅为iTOP-RK3568开发板驱动开发指南-第十八篇 PWM
【驱动教程】iTOP-RK3568开发板进行讲解第十三期,主要讲解输入子系统,共计24 讲
基于ArkTS语言的OpenHarmony APP应用开发:HelloOpenharmony

linux驱动程序如何加载进内核
STM32移植UCOS和编写GUI程序的平台如何建立?
鸿蒙OpenHarmony【小型系统 编写“Hello World”程序】 (基于Hi3516开发板)
鸿蒙OpenHarmony【标准系统 编写“Hello World”程序】(基于RK3568开发板)
鸿蒙OpenHarmony【标准系统编写“Hello World”程序】 (基于RK3568开发板)
鸿蒙OpenHarmony【小型系统编写“Hello World”程序】 (基于Hi3516开发板)
OpenHarmony内核编程实战

怎么编写Framebuffer驱动程序

【从0开始创建AWTK应用程序】编译应用到RTOS平台
浅谈兼容 OpenHarmony 的 Flutter






 工商网监
工商网监
评论