 自动驾驶系统任务控制介绍
自动驾驶系统任务控制介绍
任务控制
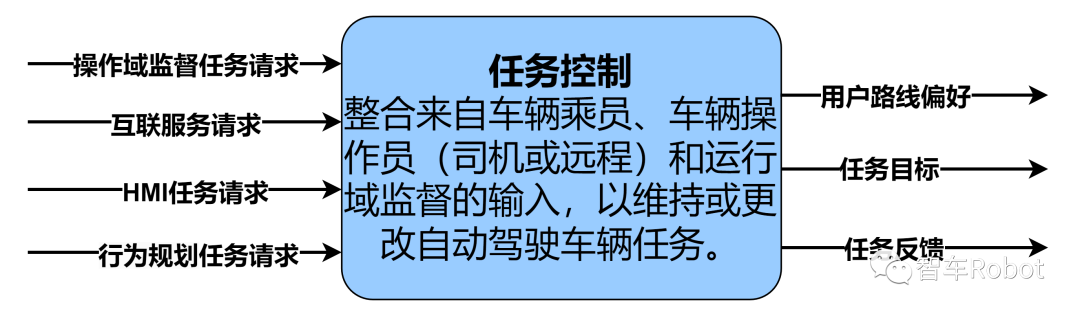
任务控制任务控制组合了来自车辆乘员、车辆操作者(司机或远程操作者)和操作域监督的输入,以维持或改变自动驾驶车辆任务问题目标和边界到路径规划。在此任务中,它使用两个关键抽象:
在这个任务中,它使用了两个关键的抽象概念:
•自动驾驶车辆任务:代表使用目的和驾驶状态的结合。包括目标目的地、行程中断、迭代和等待模式,以及任务期间驾驶状态之间的转换。
•驾驶状态:代表自动驾驶车辆、司机和潜在监督车队操作者的注意力和操作权限状态。驾驶状态包括最小风险条件转换、手动驾驶以及各种辅助和自动化驾驶级别。
注:在辅助驾驶(SAE L0-L2 级别,包括 L2+
扩展)的背景下,对通用功能块图提出以下解释:用户主动的操作,比如踩踏油门、转动方向盘以直接控制或略微引导车辆运行轨迹,从这个简化的架构的角度来看,是对任务目标和用户路线偏好的短期设置变更。这些变更通过HMI任务请求从人机界面接收。
因此,这些抽象概念具有扩展的传统意义。这些解释包括“立即右转”或“加速”(均为用户路线偏好))以及更复杂的辅助行为,比如“如果交通情况允许,进行监控的自动超车”或“根据左转指示灯是否打开改变自适应巡航控制(ACC)”。作为下游结果,“路线目标”(传递给行为规划)可能反映用户主动操控。
任务控制输入:
•操作域监督任务请求:操作域监督系统的条件分析触发的改变自动驾驶车辆任务,可能启动驾驶状态短期变化,在任务控制责任下进行状态转换。任务改变也可能导致任务目标信号变化。
•连接服务任务请求:连接服务触发改变自动驾驶车辆任务,将导致任务目标信号变化,作为被修改的任务的二阶效应,驱动状态可能会发生变化。
•人机界面任务请求:任何类型用户交互触发改变自动驾驶车辆任务,可能立即改变驾驶状态,进而改变任务目标信号。
•行为规划任务请求:行为规划触发改变自动驾驶车辆任务,如识别/响应交通情况变化以重新计算用户路线偏好。任务控制输出:
•用户路线偏好:通过提取自动驾驶车辆任务中数据生成,以在完成任务的同时最小化离开当前操作域的风险。
任务目标:从自动驾驶车辆任务生成,作为使用目的表达。
•任务反馈:综合自动驾驶车辆任务和四个请求信号,判断是否需要驾驶员警报、特定行动请求或提供进度报告。
-
汽车电子
+关注
关注
3026文章
7941浏览量
166891 -
控制
+关注
关注
4文章
1011浏览量
122655 -
车辆
+关注
关注
0文章
82浏览量
15128 -
自动驾驶
+关注
关注
784文章
13784浏览量
166373
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论