 解析红外遥控模块的工作原理
解析红外遥控模块的工作原理
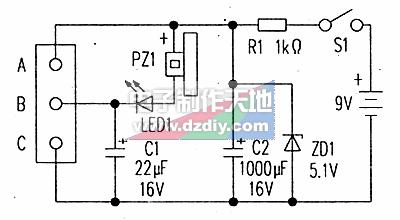
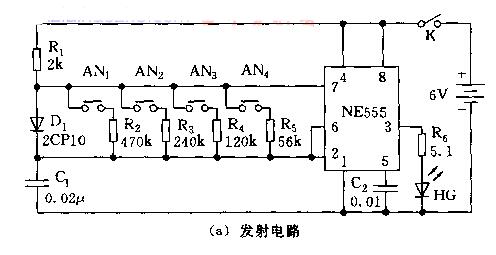
让红外线模块工作起来,首先你得给它供电,然后你得有个CPU来处理它发送数据,通过单片机处理以后,我们才能知道红外模块发送的是什么数据。红外接收端和CPU连接,红外接收端给CPU的数据,是一些PWM波,也就是一些高低电平组成连续波形。因此,我们需要CPU具有处理这些波形的能力。
CPU需要的功能:
1、定时功能:也就是计时用;
2、捕获功能:上升沿捕获,下降沿捕获;
3、中断功能:定时时间,上升沿捕获,下降沿捕获;
首先将CPU的捕获IO设置为上升沿捕获,等待上升沿到来,上升沿到来,定时器开始计时;然后将CPU的捕获IO口捕获设置为下降沿捕获,等待下降沿到来,下降沿到来,停止计时,计算这2个沿的时间Time,这个时间,也就是高电平的时间。
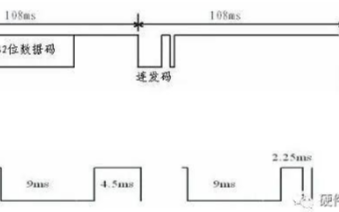
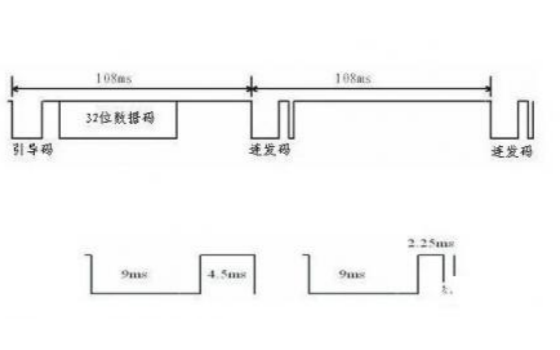
通过这个高电平时间来确定收到数据是0或者1,也有可能是重复码和引导码。
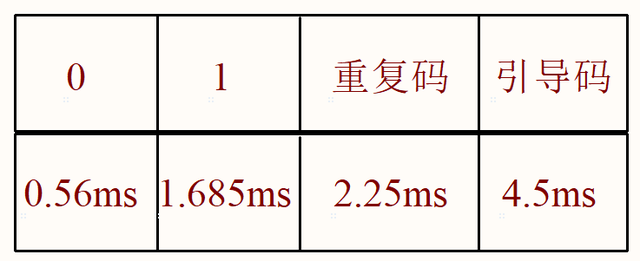
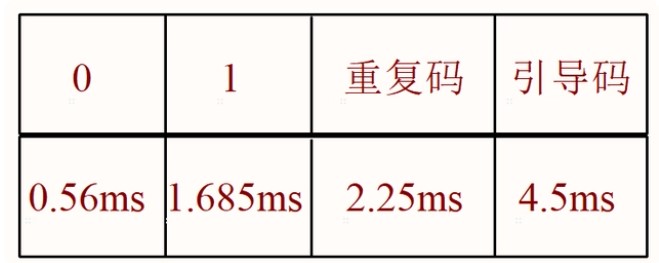
1、Time为0.56ms(高电平时间)时,收到的电平为0;
2、Time为1.685ms(高电平时间)时,收到的电平为1。
3、Time为2.25ms(高电平时间)重复码;重复码,就是重复按某一个键。

4、Time为4.5ms(高电平时间),引导码;

红外线发送的每一帧数据,除了引导码以外,有32位有效数据,每个字节为8位,一帧数据的有效数据也就是4个字节。
从高位到低位,高两个字节为地址码和地址反码,后面两个字节为数据码和数据反码。

得到32位数据后,需要对数据进行处理:
我们定义一个32位的变量RevData。
同时定义4个8位的变量,地址码AdrCode,地址反码AdrInv,数字码keyValue,数字反码keyIvalue。
将变量RevData右移24位后,将值赋给地址码AdrCode;
将变量RevData右移16位后,和0xff进行与运算后赋值给地址反码AdrInv。
如果将AdrCode取反后,等于AdrInv,说明接收的数据是正确的。
将变量RevData右移8位后赋值给数字码keyValue
直接将变量RevData赋予给数字反码keyIvalue
如果将keyValue取反后,与keyIvalue相等,说明接收到数据无误。
-
红外遥控器
+关注
关注
3文章
133浏览量
21664 -
PWM波
+关注
关注
0文章
99浏览量
16854 -
CPU接口
+关注
关注
0文章
8浏览量
5792
发布评论请先 登录
相关推荐
红外对管的工作原理?
可控硅在红外遥控开关中的应用及工作原理
基于STM32的红外遥控和解码遥控程序解析

一文详解红外遥控模块工作原理
红外遥控的原理详细说明
红外遥控模块的工作原理





 工商网监
工商网监
评论