 基于RoboMasterC板的RT-Thread使用分享—PWM使用
基于RoboMasterC板的RT-Thread使用分享—PWM使用
创建工程
在上篇文章中我是使用基于芯片创建的,我原本想着不通过BSP文件在教程中教大家一步一步的通过Kconfig+CubeMX配置出可以驱动整个开发板所有外设的工程的。在社区前辈的提醒后才知道通过基于芯片创建工程是没有办法Kconfig配置的。
因此我在之后的教程中我会基于RT-Thread提供的BSP文件stm32f407_robomaster_c来创建工程
但是这个bsp文件暂时还没有支持板上的所有外设,因此我计划随着教程的编写,我也会帮忙维护这个bsp文件,将我们使用到的外设增加支持。
便于大家后续使用,也满足我希望告诉大家Kconfig配置的计划。下图是目前bsp文件的外设支持情况。

下面就正式开始创建工程。
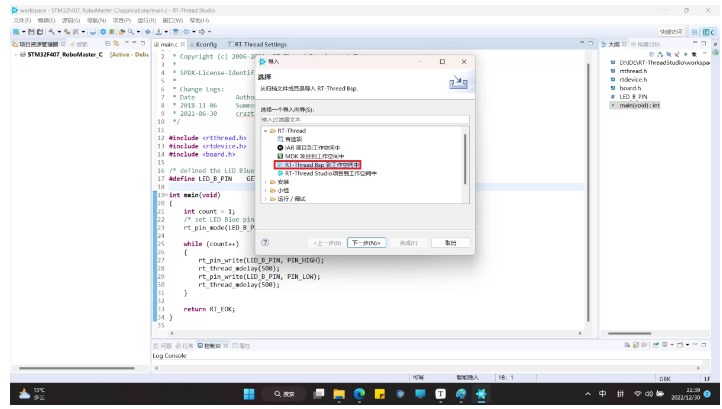
我们这里点击导入
之后选择RT-Thread BSP到工作空间中
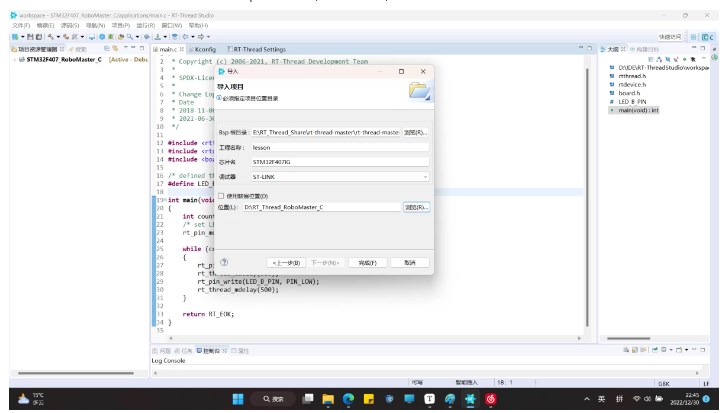
BSP根目录选择从Github下载下来的bsp文件路径,点击完成,即可创建工程。
点击编译,下载后根据BSP文件提供规范,下载后将实现LED灯闪烁的功能。如下图LED_B闪烁说明工程创建成功。

PWM教程之呼吸灯
CubeMX配置
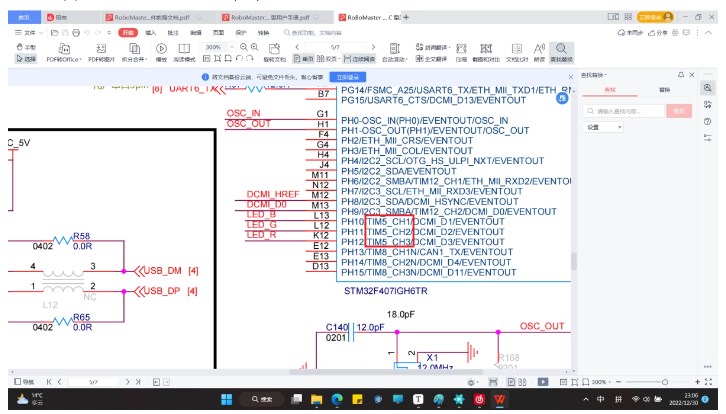
首先我们来看一下开发板原理图,来看看LED引脚连接着哪一个定时器输出引脚。
通过原理图我们可以看到是TIM5的1、2、3通道。
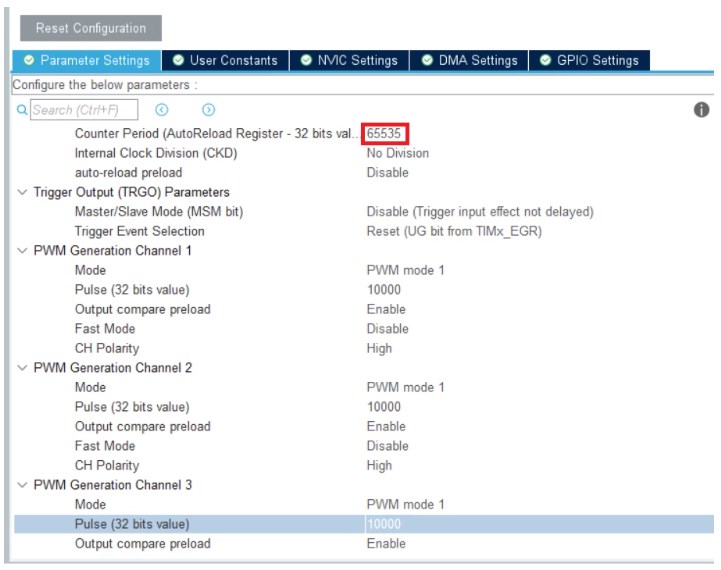
接下来我们就在CubeMX中查看相关引脚的配置。我们需要把TIM5的通道1、2、3设置为PWM模式,并且勾选Internal Clock。
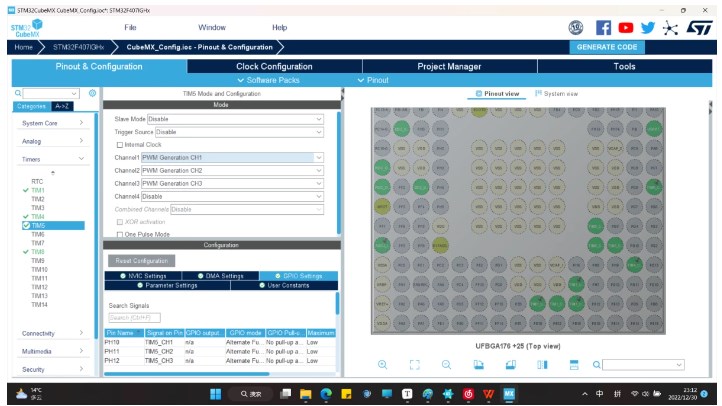
设置重载值为65535。这里设置的原因我会在后面进行频率计算的时候再说明。
原理讲解(计算部分新手可视情况略过)
PWM简介
PWM即脉冲宽度调制,是利用微处理器的数字输出来对vwin 电路进行控制的一种非常有效的技术。
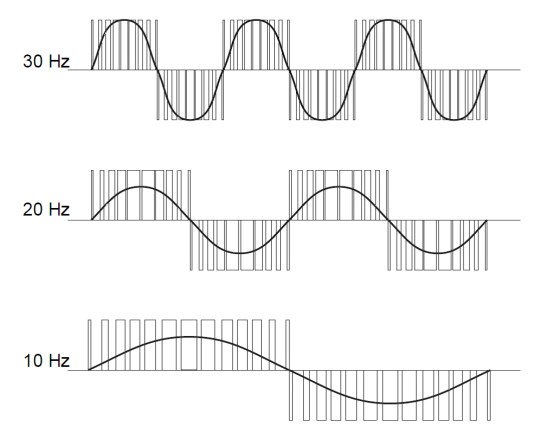
例如上图中,矩形脉冲是 stm32 输出的数字信号,当这个信号接到外设上时,效果可以等效为这个正弦波。
一个周期内高电平的持续时间占总周期的比例成为占空比,通过修改占空比,可以改变输出的等效模拟电压。例如输出占空比为 50%,频率为 10Hz 的脉冲,高电平为 3.3V.则其输出的模拟效果相当于输出一个 1.65V 的高电平。此外 PWM 输出的频率也会影响最终的 PWM输出效果,PWM 输出的频率越高,最终输出的“连续性”越好,越接近模拟信号的效果,频率低则会增强离散性,最终的输出效果会有比较强的“突变”感。
脉冲调制有两个重要的参数,第一个就是输出频率,频率越高,则模拟的效果越好。第二个就是占空比。占空比就是改变输出模拟效果的电压大小。占空比越大则模拟出的电压越大。
定时器触发频率计算
接下来给大家简单的讲解一下定时器触发频率,以及PWM信号的周期和占空比的计算。
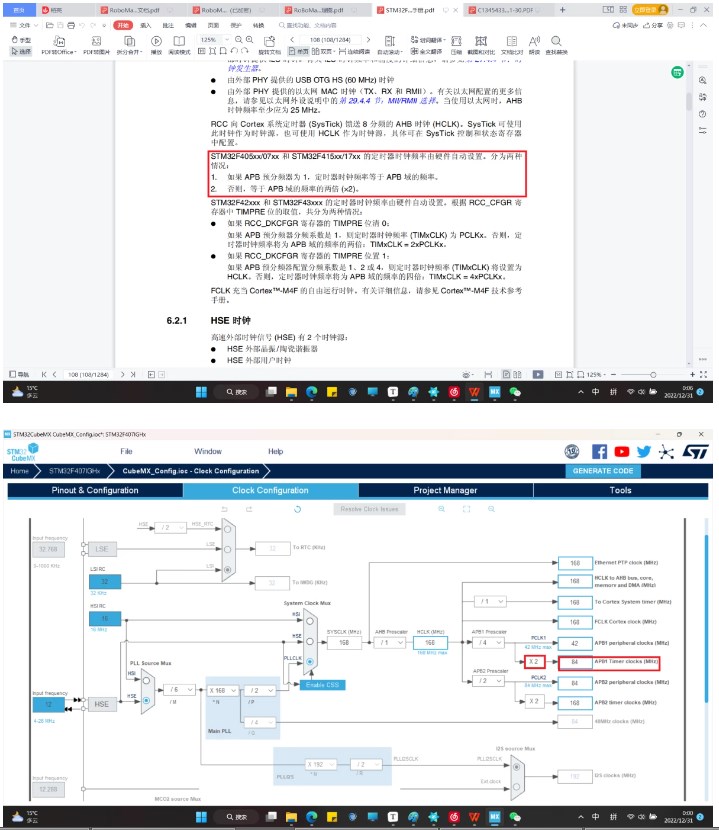
首先是定时器的触发频率,这里我们首先需要查看datasheet,看我们的TIM5是挂载在哪一条总线的。这里我们可以看到他是在APB1上的。
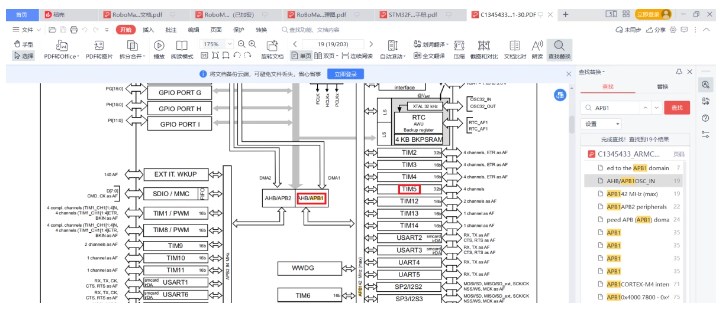
接着我们就要看CubeMX上我们配置的时钟树了,在整个时钟树的最右端,可以看到 APB1 和 APB2 两个总线的时钟频率设置,其中 APBx peripheral clocks 为挂载在总线上的定时器以外的外设提供时钟源,APBx timer clocks 为挂载在总线上的定时器提供时钟源。那么这里我们就可以知道TIM5时钟源频率为84MHz,时钟树的配置在上篇文章有较为详细的解释,这里就不重复了。
这里解释一下前面的倍频为何是2,这里可以看到STM32F4xx中文参考手册,我们这里APB1预分频器为4,所以定时器时钟频率等于APB域的频率的两倍,所以倍频为2
确定时钟源频率之后,我们就开始计算定时器触发频率,我们前面设置TIM5_PSC为0,因此分频值为1,因为分频值为 TIMx_PSC 中的分频值+1(毕竟分频不可能为0),所以我们进入的84MHz的频率信号分频后还是84MHz。
当 TIMx_CNT 的值增长到 TIMx_ARR 中的值后,就会发生重载,并触发中断信号,相当于使用 TIMx_ARR 中的值又进行了一次分频。因此产生这个中断信号的频率应该为84MHz/(ARR+1)(需要加 1 是因为 CNT 是从0开始计数的)。我们上面设置的重载值为65535。
因此定时器触发频率为84000000/65536=1281.7Hz,相当于0.78ms会触发一次中断信号。这个中断信号我们还可以用来做一些比如LED灯定时器亮灭等操作,由于篇幅原因中断相关知识这里就不过多的展开了。这里定时器中断触发时间也就是PWM信号周期。
占空比的计算
上文我们讲到了PWM一大重要参数就是占空比,而我们设置占空比的重要方式就是设置比较寄存器的值。毕竟我们不能随便重设重载值,这样子PWM周期也会发生变化。那么比较值是起到怎样的作用呢?下图就可以解释,下图为递增计数模式的示意图,当定时器以 PWM 模式工作时,会自动将 TIMx_CCRx 的值与 TIMx_CNT(计数寄存器)中的值做比较,当 TIMx_CNT 中的值小于 TIMx_CCRx 的值时,PWM 输出引脚输出高电平,大于时则输出低电平。
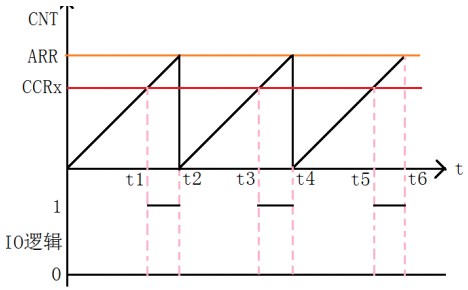
那么我们就可以知道占空比的计算公式为CCRX/ARR*100%,比如重载值为50000,比较寄存器值为25000,那么占空比为50%。
原理部分就到此为止下面就讲一下在RT-Thread Studio中的操作。
代码实践
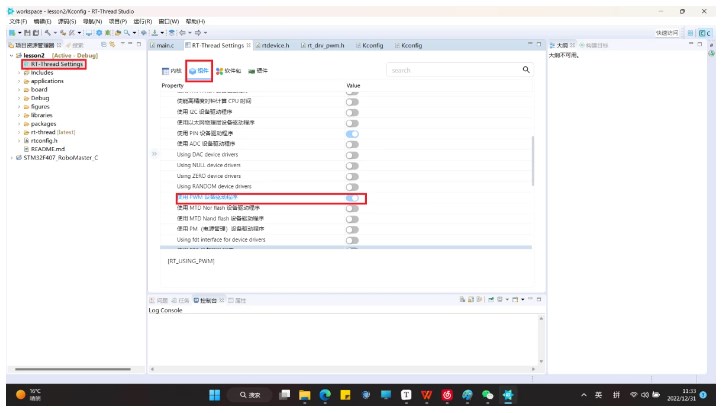
首先我们选择使用PWM设备驱动程序
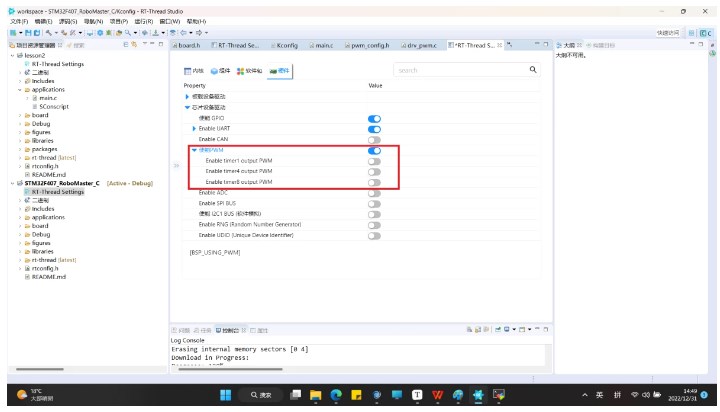
然后我们需要在硬件中选择使能PWM并且选择相应的定时器与通道,但是我们发现并没有我们需要的timer5,这时候我们就需要修改Kconfig文件了。
我们在board/Kconfig中添加如下代码,这里我们简单的修改其他PWM配置即可。
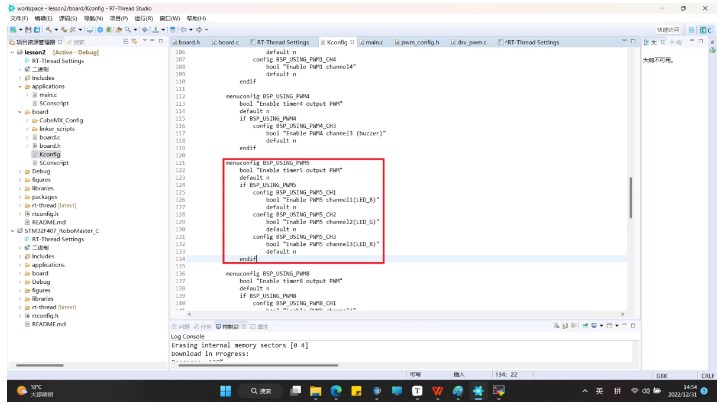
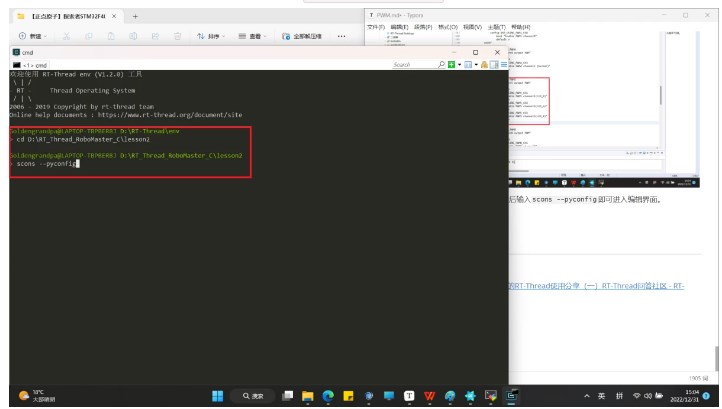
之后我们使用Env工具进入工程所在目录后输入scons --pyconfig即可进入编辑界面。
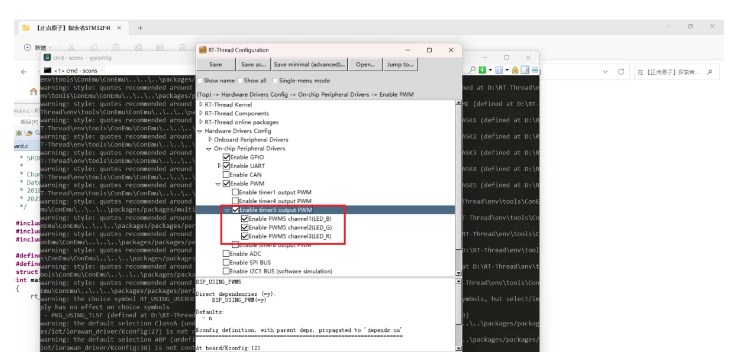
这里我们就可以看到我们在Kconfig中添加的外设,点击使能,保存修改。
之后输入scons --target=eclipse重新构建工程,等号后面的参数取决于你使用的IDE,比如我原来使用的是Clion那么就输入scons --target=cmake,RT-Thread Studio是基于eclipse的所以这里选择scons --target=eclipse
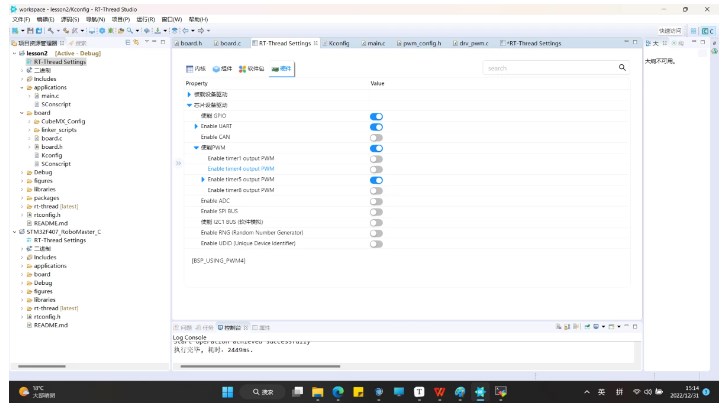
回到RT-Thread Setting可以看到我们增加的外设了。
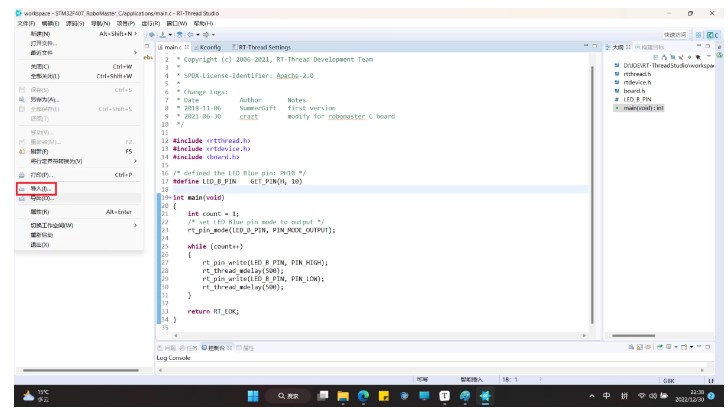
之后我们就可以在main函数中编写代码,实现呼吸灯的功能了。
这里就是简单的修改了官方的PWM例程代码
/*
Copyright (c) 2006-2021, RT-Thread Development Team
SPDX-License-Identifier: Apache-2.0
Change Logs:
Date Author Notes
2018-11-06 SummerGift first version
2021-06-30 crazt modify for robomaster C board
/
#include
#include
#include
#define PWM_DEV_NAME "pwm5" / PWM设备名称 /
#define PWM_DEV_CHANNEL 1 / PWM通道 */
struct rt_device_pwm pwm_dev; / PWM设备句柄 /
int main(void)
{
rt_uint32_t period, pulse, dir;
period = 500000; / 周期为0.5ms,单位为纳秒ns /
dir = 1; / PWM脉冲宽度值的增减方向 /
pulse = 0; / PWM脉冲宽度值,单位为纳秒ns /
/ 查找设备 */
pwm_dev = (struct rt_device_pwm )rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!n", PWM_DEV_NAME);
return RT_ERROR;
}
/ 设置PWM周期和脉冲宽度默认值 /
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/ 使能设备 /
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
while (1)
{
rt_thread_mdelay(50);
if (dir)
{
pulse += 5000; / 从0值开始每次增加5000ns /
}
else
{
pulse -= 5000; / 从最大值开始每次减少5000ns /
}
if (pulse >= period/2) / 经过测试发现占空比超过50%后对于亮度的影响较小因此就设置死区 /
{
dir = 0;
}
if (0 == pulse)
{
dir = 1;
}
/ 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
}
return RT_EOK;
}
最终烧录效果为蓝灯进行呼吸灯操作。
-
led灯
+关注
关注
22文章
1592浏览量
107950 -
定时器
+关注
关注
23文章
3246浏览量
114719 -
PWM波
+关注
关注
0文章
99浏览量
16854 -
STM32F407
+关注
关注
15文章
187浏览量
29436 -
RT-Thread
+关注
关注
31文章
1285浏览量
40081
发布评论请先 登录
相关推荐
基于RoboMasterC板的RT-Thread使用分享—PWM扩展实验
RT-Thread编程指南
RT-Thread开发,如何有效学习RT-Thread的五个步骤
RT-Thread Studio驱动SD卡

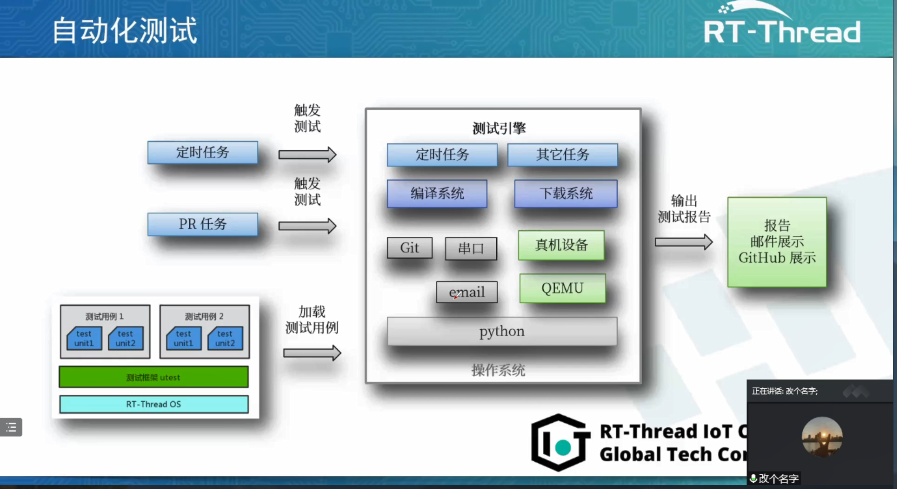
RT-Thread全球技术大会:RT-Thread测试用例集合案例
RT-Thread学习笔记 RT-Thread的架构概述

基于RoboMasterC型开发板的RT-Thread使用分享(一)
基于RoboMasterC型开发板的RT-Thread使用分享(二)
RT-Thread文档_RT-Thread 潘多拉 STM32L475 上手指南

基于rt-thread的socket通信设计






 工商网监
工商网监
评论