 深入理解SerDes系列之三
深入理解SerDes系列之三
抖动是指信号的跳边时刻偏离其理想(ideal)或者预定(expected)时刻的现象。噪声,非理想的信道,非理想的电路都是产生抖动的原因。
3.1 时钟的抖动(clock jitter)
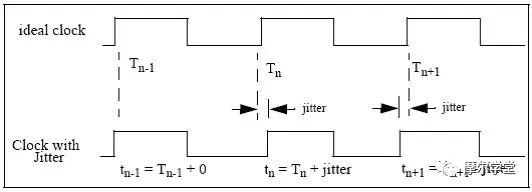
Figure 3.1 Clock Jitter
对于时钟信号,根据应用场景的不同,对抖动的定义也不一样。比如数字逻辑计算时序余量的时候,关心的是周期抖动。而时钟设计人员更喜欢相位抖动,因为可以利用频谱评估相位抖动,并可以用频谱来评估具体的干扰对总相位抖动的贡献。
3.1,介绍一下几种抖动的定义。
l 相位抖动(phase jitter)
Jphase(n)= tn– n*T。理想时钟的每个周期T都是相等的,没有抖动。真实时钟的跳边沿相对于理想时钟的偏离称作相位抖动。
l 周期抖动(period jitter)
Jperiod(n)= (tn- tn-1)– T。周期抖动是实际时钟的周期相对于理想周期的偏离(deviation)。显然Jperiod(n) = Jphase(n) - Jphase(n-1)。
l Cycle-to-Cycle jitter
Jcycle(n) = (tn- tn-1) - (tn-1- tn-2)。前后相邻的两个周期的偏差是Cycle-Cycle抖动。显然Jcycle(n)= Jperiod(n) – Jperiod(n-1)。
假设相位抖动的最大值为 +/-Jp,而且抖动的频率fjitter= 0.5fclock= 0.5/T,也就是,
tn-2时刻的相位抖动为最大值+Jp,tn-1时刻的相位抖动为最小值-Jp
tn时刻的相位抖动为最大值+Jp, tn+1时刻的相位抖动为最小值-Jp
那么,周期抖动最大值 Jperiod=+/- 2* Jp
那么,Cycle-Cycle抖动最大值 Jcycle=+/- 4* Jp
3.2.数据的抖动(data jitter)
在高速SerDes领域每个人都在说抖动,因为抖动直接和误码率(BER)相关。
SerDes发送端的一个重要要求是抖动(jitter generation)----针对特定的码型(pattern),速率和负载情况下,发送端所生成的抖动。
信号经过信道(channel)到达接收端时,又会进一步放大抖动,不同的码型(pattern)包含的频率成分也不一样,信道对不同频率成分的传输延时也不一样(非线性相位), 产生和数据pattern相关的确定性抖动。阻抗不连续产生的反射,相邻信号的串扰和噪声都会引起数据抖动。
SerDes接收端的一个重要指标是抖动容忍能力(Jitter Tolerance)----针对特定的码型和误码率要求(BER<10-12),SerDes接收端能够容忍的抖动大小。对抖动评估时,会使用眼图(eye-diagram),浴缸曲线(bath curve),抖动分布柱状图(PDF),抖动频谱(jitter spectrum)等图形手段。
有一点需要说明,在谈论高速SerDes的数据抖动时(Tj,Rj,Dj etc.),是不包括低频率抖动的。这是因为低频率的抖动被认为是一种wander,可以被CDR跟踪,不会引起误码。在用示波器(SDA)测量数据抖动的时候,可以设置示波器内嵌的CDR环路带宽,示波器测量的抖动数据已经滤掉了低频抖动。
根据抖动产生的原因和概率密度函数,常常将抖动分为几类。对抖动进行分类的意义在于某些类型的抖动可以被校正,而其他类型的不能被校正。经典的,总抖动Tj(Total Jitter)被分类为确定性抖动Dj (deterministic jitter)和随机抖动Rj (random jitter)。抖动以UI或者ps为单位,可以是均方根值,或者峰峰值。
3.2.1 Dj
Dj被进一步细分,
占空比失真抖动。差分信号的正端负端的偏置电压不一致,或者上升沿和下降沿时间不一致会导致占空比失真。因为DCD和数据pattern相关,是可以被校正的抖动。
l DDJ(Data dependent jitter)
数据码型相关的抖动,也称 码间干扰ISI(intersymbol interference)。DDJ是由于不理想的信道导致。是可以被均衡器校正的抖动。
l Pj(Periodic jitter)
周期性抖动。Pj由电路上周期性干扰源导致。比如开关电源的开关频率,时钟信号的串扰等。虽然电源的开关频率一般在CDR的跟踪范围内,但是低次谐波成分可能会落在环路带宽外,或者jitter peaking区域, 更重要的是电源谐波对CDR内VCO的干扰是不能被抑制和跟踪的,所以对于基于Ring VCO的CDR一定要尽可能的使用LDO供电。Pj不能被均衡器校正.
l BUJ(Bounded uncorrelated jitter)
BUJ由非时钟的干扰源引起。如果干扰源aggressor和victim是异步的,抖动的概率分布为有界的高斯分布,此时也称作CBGJ(Correlated Bounded Gaussian Jitter)。BUJ/CBGJ不能被校正。
3.2.2 Rj
Rj有半导体本身的噪声引起,一个重要特征就是Rj的概率密度函数是高斯分布的,没有边界,且和数据pattern无关。只有在一定误码率约束下,才可以被认为是有界的。
3.2.3 Tj
数学意义上,抖动的概率分布函数可以近视为高斯分布和双底拉克分布的卷积。
对高斯分布有贡献的抖动为:
n Rj为高斯分布
n 大量Pj叠加的效果也为高斯分布
n 部分BUJ也为高斯分布
对双底拉克分布有贡献的抖动为:
n DCD被近视为双底拉克概率分布
高斯分布和双底拉克分布的卷积:
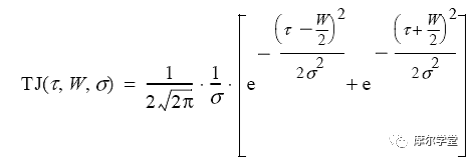
其中,W被认为是确定性抖动的峰峰值,δ是高斯分布的均方差。见图3.2, 可以看到,随着确定性抖动W的增加,概率密度分布曲线的顶部出现了双峰。一般来讲顶部曲线反映了确定性抖动的大小程度。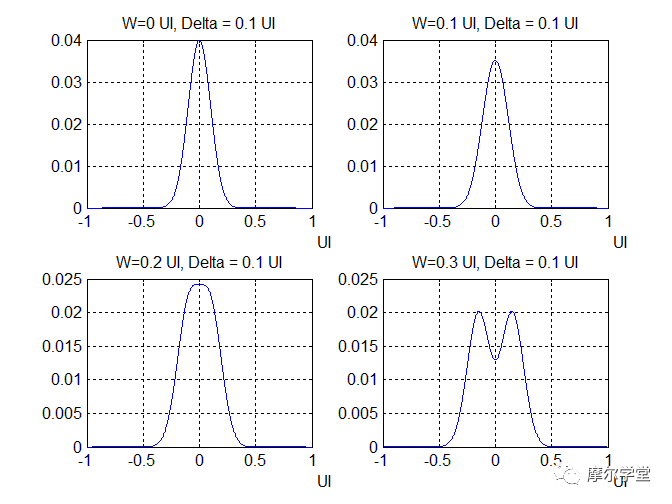
Figure 3.2 PDF of Tj with different Dj and Rj
把一个UI内的两个跳变沿处(0 UI处和1UI处)的概率分布函数放在一张图中,就是抖动的浴缸曲线(bathtub curve)。因为对数的宽动态范围,Y坐标以对数显示。图3.3为确定性抖动W=0.05UI, 高斯抖动方差0.05UI的浴缸曲线。
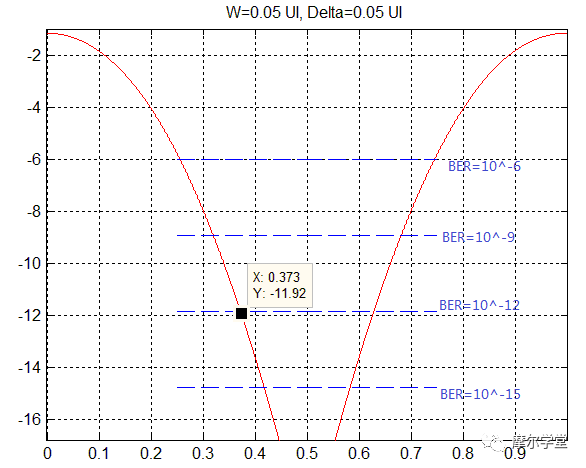
Figure 3.3 Bathtub Curve of Tj with 0.05 Dj peak and 0.05 Rj RMS
浴缸曲线还会标出对应的误码率BER坐标,比如图中BER=10^-12的峰峰值抖动为Tj(p-p)=0.373*2 = 0.746 UI。曲线下面的面积占总面积的比率就是误码率。比如图中,
浴缸曲线的顶部主要为确定性抖动Dj的贡献,越靠近底部,高斯抖动的贡献越大,并以高斯曲线的斜率衰减,也因此常利用高斯分布的特性进行估算。下表为高斯分布
和均方差关系。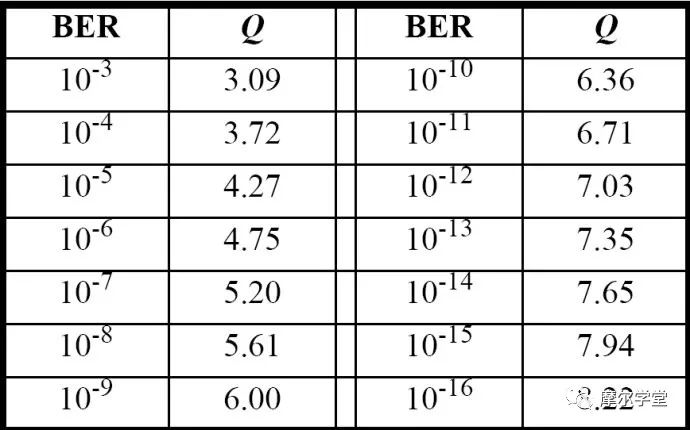
在规定的BER内,利用该表可以快速估算均方差值和峰峰值之间的关系。比如高斯抖动的均方根0.05UI,误码率要求为10^-12 BER,查表可知Q=7,那么高斯抖动的峰峰值要求是0.05UI*7*2 = 0.7UI。
如前所述,W=0.05UI,Rj=0.05UI计算出的总抖动Tj=0.746UI;
利用高斯特性估算的高斯抖动为0.7UI。
如果按Tj = Rj(0.7UI)+Dj(0.05UI)计算得到0.75U,基本是一致的,差异是因为画图程序有量化误差。
4.信号集成(SI)及仿真
4.1信道channel
SerDes信道关注的频率范围是0Hz到奈奎斯特频率,也就是2倍的信号基频。信号的基频是信号线速率的一半,也就是说信号的奈奎斯特频率就是线速率。信道对信号的损伤包括插入损失(insertion loss),反射 (reflection),串扰(crosstalk)等。这些损伤可以用S-parameter信道模型来表达。S-parameter可以有矢量网络分析仪测量(Vector Network Analyzer)得到。信道不是一个纯阻性网络,还包括容性和感性。这样对不同频率里成分的时延也不一样,从而产生和data pattern相关的抖动。
信道上的每一个不连续阻抗点都会产生反射,根据反位置的不同,反射信号会以不同的相位叠加在原始信号上,增加或者减小信号的幅度。
SerDes信号为差分形式,对共模干扰有较强的抑制。如果在+/-端上的干扰有差异,就会引入串扰。通常外部PCB可以保证SerDes数据和干扰源保持足够的距离,但是芯片内部由于考虑到经济性,很难保证SerDes信号和干扰源足够的隔离距离,尤其是一个通道自己的发送信号干扰自己的接收信号。
4.2芯片封装Package
封装package也是信道的一部分。芯片外部的信道可以通过VNA测量的到,而封装的S-parameter通常有芯片制造商提供,仿真时可以把两者级联起来。封装package由于距离较短,insertion loss通常不是主要问题,主要考虑的是阻抗匹配问题。
4.3 SI仿真
信号集成性(SI)仿真可以通过把SerDes发送端SPICE模型,封装和信道的S-parameter模型,接收端SPICE模型级联起来搭建仿真平台,利用仿真工具对不同的激励在不同的测试条件作电路仿真。通过测量SerDes接收端的眼图来评估是否满足设计需求。也可以通过实测接收端眼图,检验是否满足接收端的眼图模板,或者协议规定的眼图模板。
对于高速SerDes(>5Gbps),这种传统的电路仿真方法已经不能满足设计的需求。首先,过量的码间干扰ISI导致接收端眼图完全闭合,但是通过芯片内的DFE均衡后,眼图可能是很好的。其次,电路仿真(SPICE)的速度非常慢,即使是有办法把DFE均衡加入仿真,由于DFE仿真需要足够长时间的bits来训练,此时,电路仿真的仿真时间是不可接受的。
对于高速SerDes的仿真需要借助统计分析 (statistical analysis) 的方法。统计分析的方法把发送端-信道-接收端的连接近视为线性系统,计算系统脉冲响应h(t),加入噪声源来vwin 抖动,然后用激励对脉冲响应进行卷积,得到接收端的信号,这种方法可以把厂家私有的FFE,DFE自适应算法加入仿真。
统计分析 (statistical analysis)方法不能仿真电路的非线性和时变特性,所以高速SerDes往往要两者结合起来仿真SI。更多关于统计分析 (statistical analysis)方法可以参考。
审核编辑:刘清
-
时钟抖动
+关注
关注
1文章
62浏览量
15922 -
SerDes
+关注
关注
6文章
198浏览量
34905 -
频谱仪
+关注
关注
7文章
340浏览量
36027 -
SDA
+关注
关注
0文章
124浏览量
28126 -
偏置电压
+关注
关注
0文章
151浏览量
12991
原文标题:深入理解SerDes系列之三
文章出处:【微信号:moorexuetang,微信公众号:摩尔学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论