 STM32速成笔记(5)—串口通信
STM32速成笔记(5)—串口通信
一、什么是串口通信
串口通信是指外部设备与主控芯片之间,通过数据信号线、地线等,按位进行数据传输的一种通信方式,属于串行通信方式。串行通信是指使用一条数据线依次逐位传输数据,每一位数据占据固定长度的时间。可以看一下简单的串行通信示意图。

串口通信示意图
二、串口通信有什么用
这里简单列举一下串口通信的用途
• 下载程序
• 打印信息 比如将ADC采集到的电压发送给上位机的串口调试助手,或者实时监测某一个变量的变化。
三、STM32的串口通信
普中核心板上使用的STM32F103ZET6有三个USART,两个UART,他们都支持串口通信功能。USART(通用同步异步收发器)与UART(通用异步收发器)相比,多了一个同步功能,可以认为USART是UART的增强型。
四、串口通信相关概念
44.1 波特率
引用专业的说法,波特率表示单位时间内传送的码元符号的个数,它是对符号传输速率的一种度量。其实意思就是波特率表示1s内传输码元的个数。在单片机中数字都是二进制的01表示的,所以波特率可以说是1s内传输01的个数。常见的波特率有38400、9600和115200等。
波特率通常由波特率发生器产生,串口要想实现收发首先要有波特率发生器,网上介绍波特率发生器的作用是输入时钟转换出需要的波特率CLK。个人理解,波特率发生器就是提供一个时钟,这样才能发送出正确波特率的信息,比如1和0需要多久的高/低电平表示。
在串口通信时如果收发双方波特率不相同会导致通信失败,要么是接收不到,要么是接收到的是乱码。
4.2 全双工和半双工
- • 全双工可以简单解释为,我在接收消息的同时,你也可以发送消息。
- • 半双工可以简单解释为,我在接收消息时,没办法发送消息。类似于对讲机,你说话时占用了信道,对方无法跟你讲话,只有当你说完了,他才可以对你讲话。
4.3 同步通信和异步通信
同步通信和异步通信的区别在于通信双方是否需要时钟同步。同步通信的接收双方之间除了需要数据线之外,还需要一根时钟线,而异步通信不需要。关于二者的详细定义与区别,请大家自行搜索。
五、硬件连接
串口通信只需几条线即可在两个系统间交换信息,特别适用于计算机与计算机、计算机与外设之间的通信,常用的串口通信接口标准有很多,比如RS-232C、RS-232、RS-485等。但是放在单片机开发里,最简单的串口通信就是用四根线VCC、GND、TXD和RXD实现通信。

串口通信硬件连接示意图
普中核心板上常用的是USART1,其引脚对应如下
• TXD——PA9
• RXD——PA10
六、串口通信程序配置
下面以配置USART1为例,来简单展示一下USART的配置方法。
66.1 使能串口时钟和GPIO时钟
// 使能USART1,GPIOA时钟
RCC_APB2PeriphClockCmd (RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
6.2 初始化GPIO
初始化USART1用到的GPIO。TXD引脚设置为复用推挽式输出,RXD引脚设置为输入浮空。
// USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.9
// USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 输入浮空
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.10
6.3 初始化串口参数
库函数提供了一个结构体,用于初始化串口。其中包括
USART_InitTypeDef USART_InitStructure;
// USART 初始化设置
USART_InitStructure.USART_BaudRate = bound; // 串口波特率
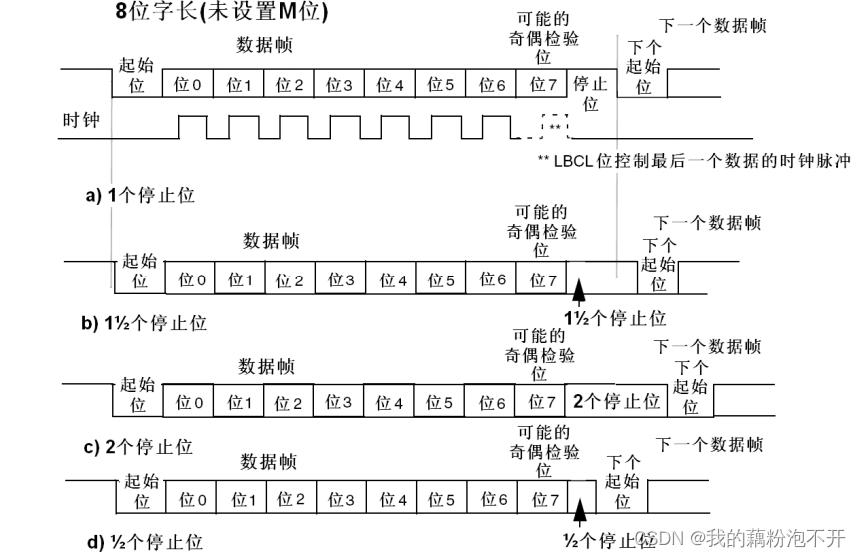
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位
// 无硬件数据流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USART1, &USART_InitStructure); // 初始化串口1
6.4 使能串口
USART_Cmd(USART1, ENABLE); // 使能串口1
6.5 串口接收中断
平时开发过程中经常需要开启串口接收中断,配置串口接收中断的方法与上一篇的外部中断有些类似,主要包括以下步骤
- • 配置中断分组(通常在main函数中初始化中配置)
- • 设置中断优先级
- • 使能中断
配置中断优先级
NVIC_InitTypeDef NVIC_InitStructure;
// Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ; // 抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能
NVIC_Init(&NVIC_InitStructure); // 根据指定的参数初始化VIC寄存器
使能串口接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启串口接收中断
6.6 串口接收中断服务函数
通常接收到的数据会是一帧,很少是一个单独的字符,这里给出一个接收一帧数据的串口中断服务函数。需要注意的是,在初始化串口时,需要使能空闲中断。
使能空闲中断的程序如下
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); // 使能空闲中断
/*
*==============================================================================
*函数名称:USART1_IRQHandler
*函数功能:USART1中断服务函数
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
u32 gReceCount = 0; // 接收计数变量
u32 gClearCount = 0; // 清空接收数组计数变量
u8 gReceFifo[1500]; // 接收数组
u8 gReceEndFlag = 0; // 接收完成标志位
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收到一个字节
{
gReceFifo[gReceCount++] = USART_ReceiveData(USART1);
}
else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) //接收到一帧数据
{
USART1- >SR; // 先读SR
USART1- >DR; // 再读DR
gReceEndFlag = 1; // 接收完成标志置1
}
}
接收完成后,接收完成标志位会置1。此时,对接收到的帧进行解析处理。解析完成后需要清除接收数组,同时,不要忘记清除接收完成标志位。
/*
*==============================================================================
*函数名称:Uart_Rece_Pares
*函数功能:解析串口接收内容
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Uart_Rece_Pares(void) // 串口接收内容解析函数
{
if (gReceEndFlag == 1) // 如果接收完成
{
// 解析接收内容
// 清空接收数组
for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++)
{
gReceFifo[gClearCount] = ' ';
}
gReceEndFlag = 0; // 清除接收完成标志位
gReceCount = 0; // 清零接收计数变量
}
}
6.7 串口发送函数
//串口发送函数
void USART1_Send(u8*str)
{
u8 index=0;
do
{
USART_SendData(USART1,str[index++]);
while(USART1,str[index++]);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
}
while(str[index]!=0);
}
其实这里最根本的USART_SendData()本质就是将数据搬运到串口发送的寄存器。当然除了直接用发送函数发送,也可以直接重定向之后用printf发送,这里就不详细介绍了,有需要的友友可以直接去看普中或者正点的教程视频。
七、拓展
7.1 printf重定向
关于重定向的概念这里就不再做介绍了,重定向之后就可以在程序中使用printf直接打印或者发送字符串,不再需要串口发送函数。重定向的方法就是在串口的.c文件中添加下面的程序
// 加入以下函数可以使用printf
#pragma import(__use_no_semihosting)
// 标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1- >SR&0X40)==0);//循环发送,直到发送完毕
USART1- >DR = (u8) ch;
return ch;
}
7.2 接收帧解析
这里的接收帧解析比较简单,比如有些项目要求接收到某些特定字符执行某些操作。这时需要根据接收帧的长度和固定位置的字符来解析命令。
比如项目要求上位机(电脑)发送“BEEP ON”时,蜂鸣器响。这时在解析时只要接收到长度为6,第5和第6个字符分别为“O”,“N”时,开启蜂鸣器即可。
// 解析接收内容
if (gReceCount == 6 && gReceFifo[5] == 'O' && gReceFifo[6] == 'N')
{
// 开启蜂鸣器
}
当然上面的只是粗略的卡命令,也可以写的更详细。
八、实战项目
8.1 前期准备
- • CH340驱动
- • USB转TTL,用于单片机与电脑的通信
- • 串口调试助手
刚买来的普中核心板,不拔短接片的话可以直接通过USB下载程序,或者与电脑进行串口通信,串口为USART1。注意一定要插图中标出来的USB接口,另一个只能用来供电。

串口通信跳线帽连接
8.2 项目要求
• 单片机上电发送“Sys Ready!”
• 电脑串口助手发送“LED1 ON”(带回车换行),LED1点亮,同时单片机回复“OK!”
• 电脑串口助手发送“LED1 OFF”(带回车换行),LED2熄灭,同时单片机回复“OK!”
88.3 串口程序
8.3.1 初始化串口
首先是串口初始化程序,需要开启接收中断和空闲中断。
/*
*==============================================================================
*函数名称:uart_init
*函数功能:初始化USART1
*输入参数:bound:波特率
*返回值:无
*备 注:可以修改成输入初始化哪个USART
*==============================================================================
*/
void uart_init(u32 bound)
{
// 相关结构体定义
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 使能USART1,GPIOA时钟
RCC_APB2PeriphClockCmd (RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
// USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.9
// USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.10
// Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ; // 抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能
NVIC_Init(&NVIC_InitStructure); // 根据指定的参数初始化VIC寄存器
// USART 初始化设置
USART_InitStructure.USART_BaudRate = bound; // 串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位
// 无硬件数据流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USART1, &USART_InitStructure); // 初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启串口接收中断
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); // 使能空闲中断
USART_Cmd(USART1, ENABLE); // 使能串口1
}
其次需要加上重定向函数,直接复制上面的即可。
8.3.2 串口接收中断服务函数
/*
*==============================================================================
*函数名称:USART1_IRQHandler
*函数功能:USART1中断服务函数
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
u32 gReceCount = 0; // 接收计数变量
u32 gClearCount = 0; // 清空接收数组计数变量
u8 gReceFifo[1500]; // 接收数组
u8 gReceEndFlag = 0; // 接收完成标志位
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收到一个字节
{
gReceFifo[gReceCount++] = USART_ReceiveData(USART1);
}
else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) //接收到一帧数据
{
USART1- >SR; // 先读SR
USART1- >DR; // 再读DR
gReceEndFlag = 1; // 接收完成标志置1
}
}
8.3.3 接收帧解析函数
/*
*==============================================================================
*函数名称:Uart_Rece_Pares
*函数功能:解析串口接收内容
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Uart_Rece_Pares(void) // 串口接收内容解析函数
{
if (gReceEndFlag == 1) // 如果接收完成
{
// 解析接收内容
if (gReceFifo[6] == 'N')
{
Med_Led_StateCtrl (LED1,LED_ON); // 点亮LED1
printf ("OK!rn");
}
if (gReceFifo[6] == 'F' && gReceFifo[7] == 'F')
{
Med_Led_StateCtrl (LED1,LED_OFF); // 熄灭LED1
printf ("OK!rn");
}
// 清空接收数组
for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++)
{
gReceFifo[gClearCount] = ' ';
}
gReceEndFlag = 0; // 清除接收完成标志位
gReceCount = 0; // 清零接收计数变量
}
}
8.3.3 main函数
int main(void)
{
Med_Mcu_Iint(); // 系统初始化
printf ("Sys Ready!rn");
while(1)
{
Uart_Rece_Pares (); // 接收帧解析
}
}
-
串口通信
+关注
关注
34文章
1624浏览量
55507 -
异步收发器
+关注
关注
0文章
36浏览量
10847 -
中断优先级
+关注
关注
0文章
22浏览量
9368 -
USART串口
+关注
关注
0文章
32浏览量
6818 -
波特率发生器
+关注
关注
0文章
11浏览量
4028
发布评论请先 登录
相关推荐
[笔记]|[stm32]|[寄存器存储器区别]|[PWM]|[串口]|[Timer]stm32f103笔记
![[<b class='flag-5'>笔记</b>]|[<b class='flag-5'>stm32</b>]|[寄存器存储器区别]|[PWM]|[<b class='flag-5'>串口</b>]|[Timer]<b class='flag-5'>stm32</b>f103<b class='flag-5'>笔记</b>](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)
stm32学习笔记之串口通信





 工商网监
工商网监
评论