 柔性电子与人工智能技术在智能制造领域的应用及发展
柔性电子与人工智能技术在智能制造领域的应用及发展
随着有机柔性材料、柔性电子技术、人工智能技术、大数据、云计算基础设施的不断深化发展,实现了多专业跨领域的推广使用。
本文将国内外科研院所、先进制造公司的科研成果及产品与国家的发展规划和政策导向相结合,确定出融合应用发展的可行性,构勒出未来发展趋势。
未来智能制造行业及研究领域要取得突破性进展,提高制造生产效率与制造质量来实现工作目标。需充分利用新材料、新技术、新算法,不断进行迭代升级的完善改造工作。
1.1
柔性电子
柔性电子是将有机、无机材料电子器件制作在柔性、可延性塑料、薄金属基板上的新兴电子技术,拥有高效、柔性、延展性、低成本制造工艺等特点,在信息、能源、医疗、国防等领域具有广泛的应用发展前景。
柔性电子技术基本结构主要是由电子元器件、柔性基板、交联导电体、黏合层组成,目前推动柔性电子技术发展的主要驱动力是制造工艺及设备。以低成本在大幅面基板上制作微小特征尺寸的电子器件,即以芯片特征尺寸和基板面积大小作为衡量技术水平的主要指标。
1.2
柔性制造
柔性制造技术又称为柔性集成制造技术,是集成信息技术、自动化技术、加工制造技术于一体。在计算机、软件、数据库支持下,将企业制造领域里的经营管理、设计、制造融合形成管理体系。柔性制造技术以数控技术为核心,融合了计算机、信息、检测、生产管理、质量控制等技术。将管理、制造技术有机集合,适合中大、中小批量、多品种产品的自动化加工,能满足迅速更新产品生产的要求,是先进制造技术。
柔性制造系统定义为由数控加工设备、物料运储装置、计算机控制系统组成的自动化制造系统,包括多个柔性制造单元,能根据制造任务或生产环境的变化迅速进行调整。适用于多品种、中小批量生产,柔性制造系统也可认为由加工系统、运储系统、计算机控制系统组成。
柔性制造系统的特点是:
(1)制造能力强
(2)生产率高
(3)设备利用率高
(4)质量稳定,自动化程度高
(5)具有良好的经济效益
柔性制造系统的发展趋势:
(1)小型化、单元化
(2)模块化、集成化
(3)人机融合
(4)单项技术及系统性能不断提高
(5)扩展应用范围
柔性制造系统致力于发展各类工艺性改善制造单元及小型柔性制造系统,不断完善柔性制造系统自动化功能,有效结合CAM、 CAD实现工厂全面自动化。
柔性自动化制造技术是对制造过程进行优化规范、组织、运作、协调、控制管理,以高效、低耗、优质、敏捷的绿色生产为目标。积极争取相应的社会经济效益,分别以刚性自动化、数控加工、柔性制造、计算机集成制造系统五个阶段进行发展。
1.3
人工智能
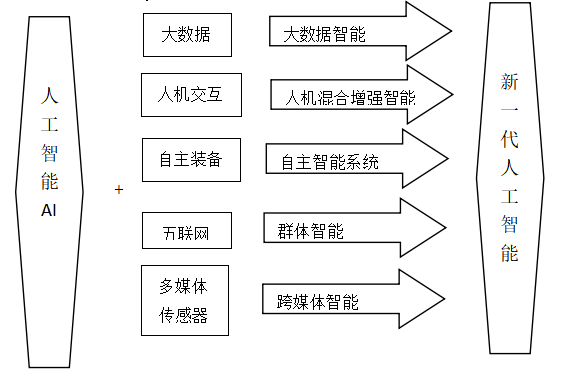
1956年美国达特茅斯会议,确定将人工智能描述为机器像人样认知、思考、学习,用计算机vwin 人的智能。通常认为人工智能是研制智能机器的科学与技术,新一代人工智能特征为跨界融合、深度学习、群体智能、人机协同。
关键核心技术描述:
1.4
智能制造
智能制造是由智能机器人与人类专家组成的人机一体智能系统,具有自动化、信息化、智能化、五联网四个层次技术。是基于新一代信息通信技术与先进制造技术的深度融合,具有自感知、自学习、自执行、自决策,贯穿设计、生产、管理、服务的新型生产方式。
智能制造以数字化制造为基础,以生产过程的控制为数字化制造核心。以自动化、数字化、网络化、智能化为智能制造的具体表现,将最新的通讯、网络、工业软件、人工智能与制造业有机融合。
工业革命进程:
(1)第一次工业革命(工业1.0 蒸汽机革命)
(2)第二次工业革命(工业2.0电器革命)
(3)第三次工业革命(工业3.0 信息革命)
(4)第四次工业革命(工业4.0 智能制造)
第四次工业革命是智能工厂和智能制造的集合体,包括智能设备、智能物料、物联网(LOT)、五联网(IPV6)。主体是制造、智能是主导、人是主宰,以数字化制造、数字化网络智能制造、智能制造演化智能制造的发展进程,具有智能设计,智能加工、智能装备、智能服务四个关键环节。
新一代智能制造系统就是通过深度学习、迁移学习、增强学习等技术的应用,增加系统认知、学习功能从而解放传统型劳动力,从事开创性工作。
1.5
CPS与数字孪生
1992年美国国家航空航天局(NASA)提出CPS是信息物理系统,将其列为关键核心技术,2018年德国提出了“CPS+制造业=工业4.0”。
CPS定义为通过集成先进的感知、计算、通信、控制等信息技术和自动控制技术,构建物理空间与信息空间中人、机、物、环境、信息等要素相互映射、适时交互、高效协同的复杂系统,以按需响应、快速迭代、动态优化实现系统内资源配置、运行。CPS是智能制造的基础,是实现工业4.0等战略的关键技术之一,是全球新一轮产业变革核心技术体系的重要支柱。
数字孪生是利用物理模型、仿真技术,在虚拟空间中完成与实体空间的映射,同时贯穿于产品的全生命周期过程。
柔性电子与人工智能技术
在智能制造领域的应用及发展
2.1
智能化机械加工
2.2
点焊机器人、装配机器人在生产线上应用
2.3
自动柔性生产线
由40余台机器人和60套智能视觉系统组成的自动柔性生产线,实现了全自动化无人水泵装配。同时柔性兼容实现多型号生产,提高了生产效率。
2.4
触觉感知在仿人类皮肤领域上的新进展
人类的皮肤可以感知力的大小和方向(自解耦),对外界刺激的定位精度可超越触觉传感器的物理分辨率(超分辨率)。基于磁性薄膜的触觉传感器,结合深度学习算法,实现了机器人触觉传感器的自解耦和超分辨率。
由嵌入在印刷电路板上的霍尔传感器,单面多级正弦磁化的磁膜组成触觉传感器,依靠填充于霍尔传感器与磁膜间的多种不同弹性厚度的硅胶,调节传感器的灵敏度和量程。
通过磁场变化测量力的变化,结合算法,测定位置。该类型人工皮肤可用于改善人机交互的安全性,提高机器人的操作能力,未来覆盖该类型人工皮肤的智能机器人将应用于更多不同的场景。
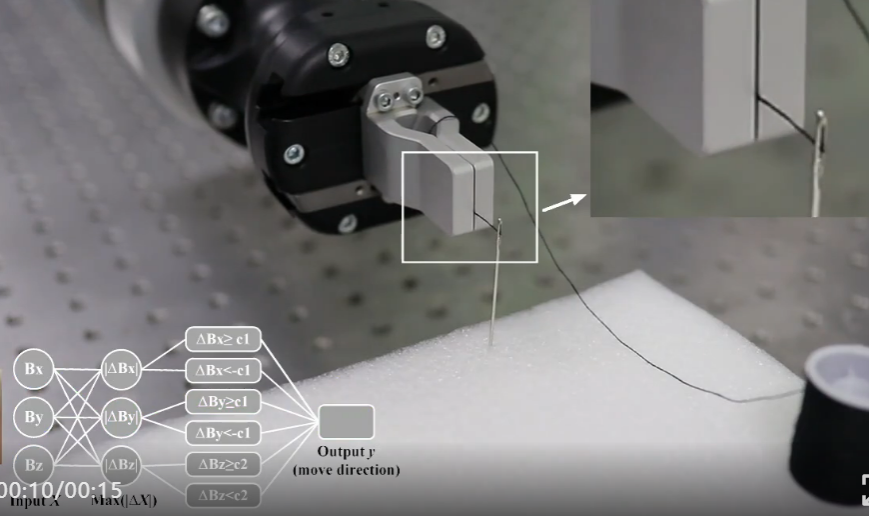
图左基于磁性薄膜的触觉传感器Ⅰ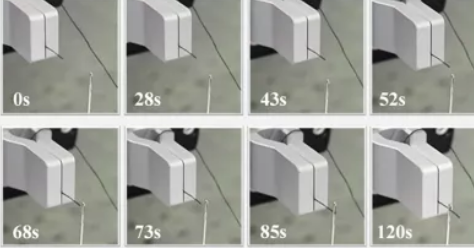
图右触觉传感器运作过程
2.5
毫米级软体机器人实现高效游动
实现具有毫米级别(中雷诺数环境下),在水环境中能正常开展运动、探索、物质传递的游动机器人是人工智能产品的研发热点。利用磁性物质与聚合物材料结合,设计制造出可被外界磁场无线驱动的高效波动游动机器人。
随着微制造、微加工技术的发展,机器人与人工智能技术的深度融合,将进一步拓展微小尺度机器人的应用场景,逐渐从医疗领域向室外空间发展。
仿生机器鱼
毫米级别的智能软体机器鱼与实物鱼的活动状态对比
2.6
使用三维扫描式激光测振仪
使用三维扫描式激光测振仪,根据特殊算法构建基于模型的控制系统用于补偿由切削力引起的静态位移,提高智能机器人的加工精度。
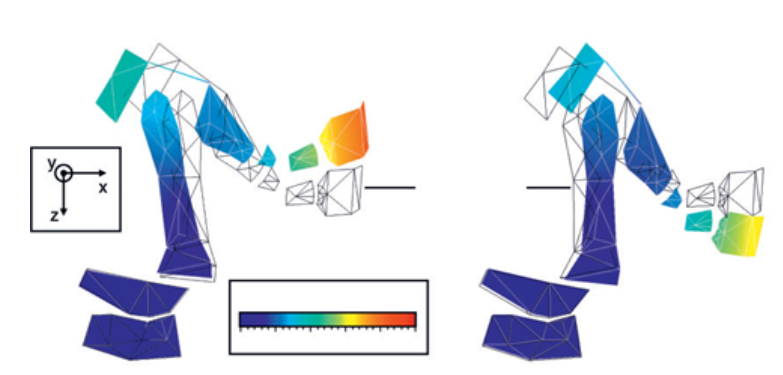
机器人在拉伸、压缩负载下的振型
2.7
微针阵列可穿戴设备领域取得新进展
具有无痛、微创、生物安全等优点的微针阵列技术,广泛应用于生物传感、经皮给药。
基于介孔微针离子泳的集成可穿戴诊疗一体化系统,通过将微针阵列与可穿戴电子设备相结合。推动实现特发性膜性肾病(IMN)、难治性特发性膜性肾病(RIMN)等糖尿病闭环治疗向轻便、自动、智能化的方向发展。
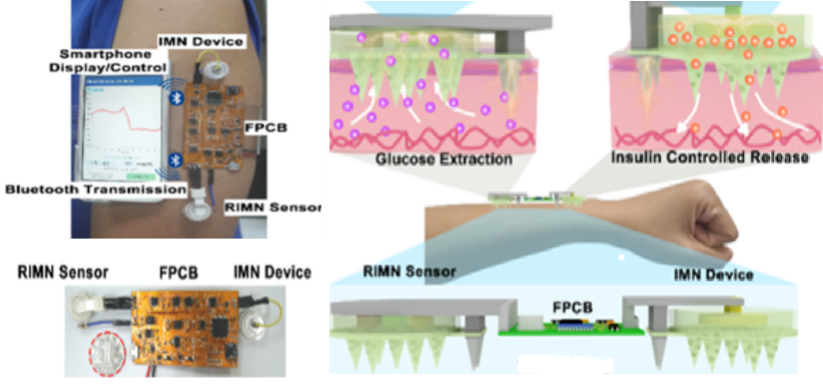
图11基于介孔微针离子泳血糖诊疗一体化系统示意图
2.8
人造伪装技术的重大飞跃
将热致变色液晶层与纵向堆叠有图案的多层银纳米线网络加热器集成在一起,通过加热器诱发的温度分布叠加,制成人造变色龙皮肤。将人造变色龙皮肤应用于软体机器人上,并结合颜色传感器和反馈控制系统。系统自适应检测背景环境的颜色变化,同时变色龙软体机器人实现实时背景颜色匹配,该系统作为下一代人工伪装技术将具有巨大发展潜力和广泛的应用场景。
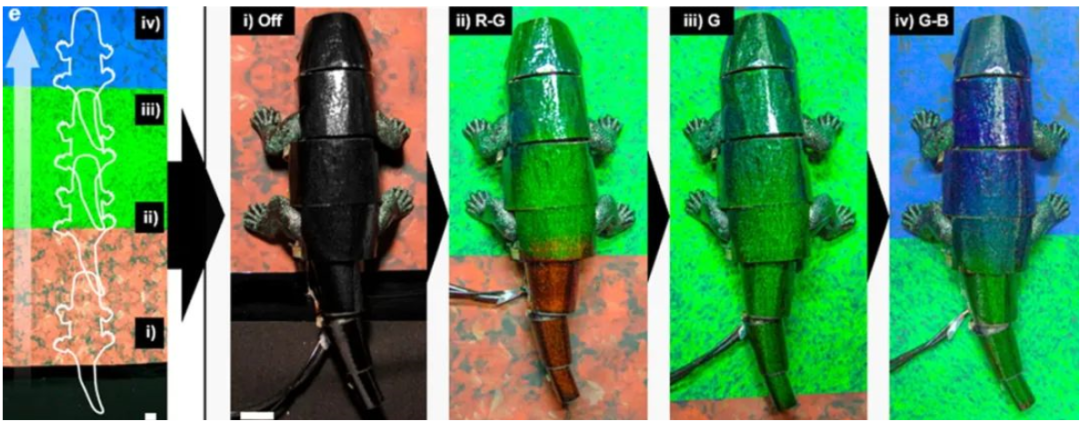
变色龙软体机器人实现实时背景颜色匹配
2.9
柔性传感器
基于模仿人类原始毛细胞功能,采用聚合物上的激光诱导石墨烯(Laser-InducedGraphene,LIG)。即在柔性材料聚酰亚胺(PI)膜上直接LIG,获取仿生人造毛细胞。在压电材料(PZT)薄膜上制造出基于无机的压电声纳米传感器(Inorganic-Based PiezoelectricAcoustic Nanosensor IPANS),得到一种集成了既能进行检测又能产生声音的柔性传感器。该传感器以有机硅基底膜SM通过声波振动,以不同位置、音频产生的振动,使人造基底膜PZT薄膜产生变形。同时分离确定出频率范围,并以电感形式输出振动达到仿真效果。
目前该传感器将检测到的人喉咙以不同强度、频率出现的振动状况,通过空气膨胀、系统电流、电压变化,产生相应声波,应用于康复医学人造喉、穿戴式、语音控制领域。
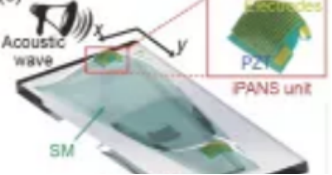
图左 无机的压电声纳米传感器 (IPANS)结构示意;

图右 薄膜柔性压力传感器
3.0
柔软材料制成的机械手臂
由软体机器人手指、线性执行器、肌腱及电缆、应变传感器、聚氨酯指套组成原型系统,将传感单元设置位于肌腱处。能感知手指在任意部位的接触状况,同时产生输出相应特征信号。由于工业传感器灵敏度远高于人类本体感受器官,当该系统应用于机器人手指使用时,可提高机器人触觉精度、纹理识别精度及系统的刚度。结合相应的柔性材料,可制造出应用性更强的类人机器人及仿生肢体。

用柔软材料制成机械手臂的各种应用
3.1
纸基电子应用
纸基电子作为柔性电子产品,具有电路制作成本低、简捷的优点。当纸张处于弯折变形状态下,转印在纸基上的液态金属电路仍具有良好的导电性、电学稳定性,电路始终保持良好的连接状态,同时具有良好的自修复能力。用酸性溶液可实现回收纸基液态金属电路,环保性强适合大规模生产制备,在可穿戴设备、智能传感、天线装置、生物医疗、教育等领域具有得天独厚的发展前景。
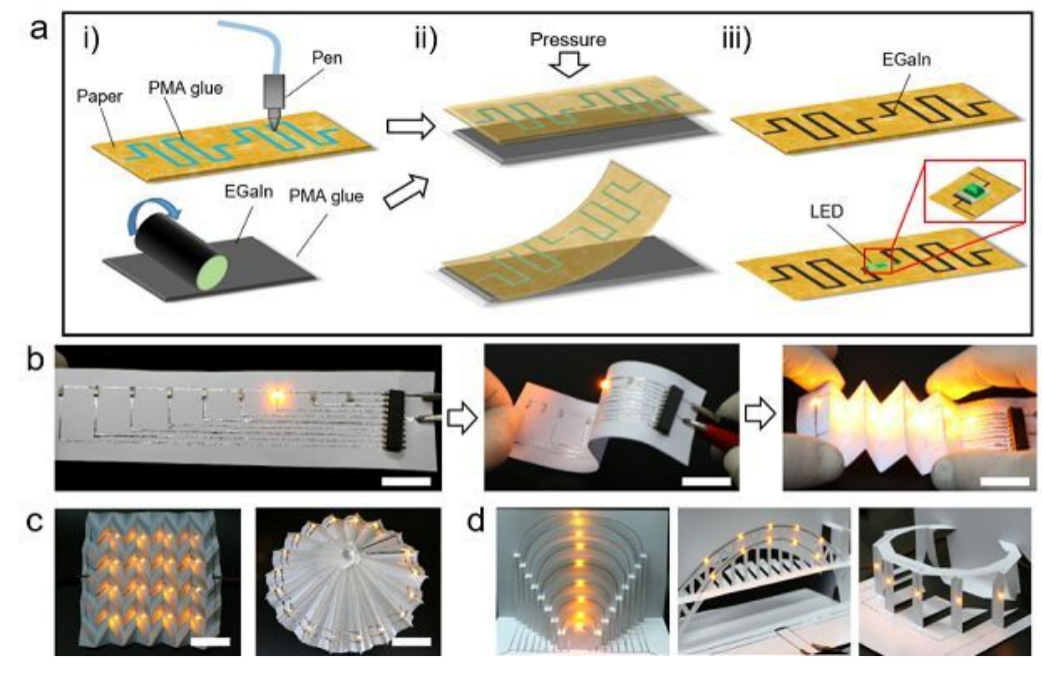
液态金属的纸基转印柔性电路制备流程示意
3.2
独立的软电流执行器
根据人类白细胞通过体液的流动能驱动细胞膜变形的生理现象,采用驱动柔性腔内的液体按一定方向流动,实现改变软体执行器的形状。
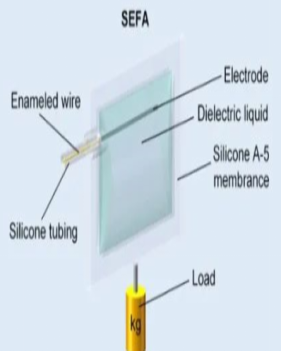
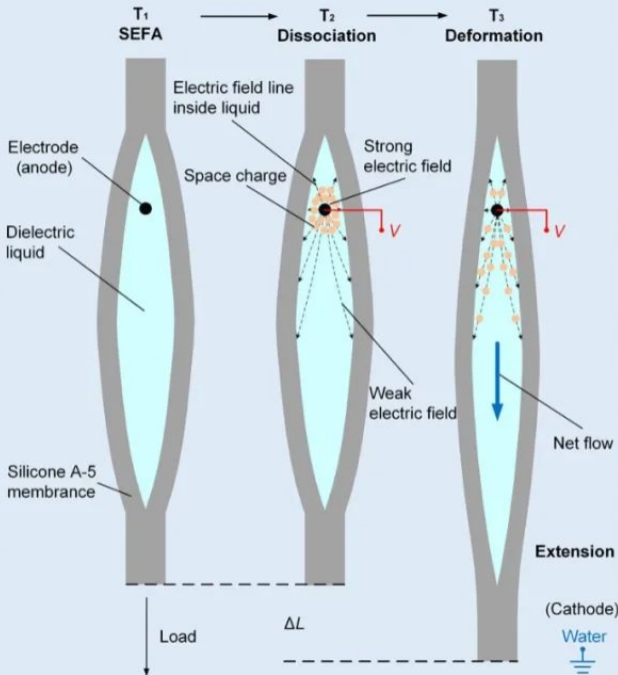
独立的软电流执行器(SEFA)工作示意
该软体执行器用于未来穿戴式辅助设备与软体机器人等应用领域,将拥有无限广阔的发展潜力。能大幅度提升输出性能,实现提升工作效率。
3.3
由探索蜥虎软体机器人模拟着落
实现飞行机器人稳定着落
亚洲蜥虎依靠摆动尾巴从高处向下跳跃,实现防摔而且安全着落。通过模拟该生物跳跃过程中出现的独特场景,研发出仿生蜥虎柔性机器人。通过机械智能化协调处理,可增强着陆的稳定性。遵循此改善降落状态的研发创新思路并作进一步发展,未来可实现无人机、飞行机器人在垂直的地面上稳定、安全降落。
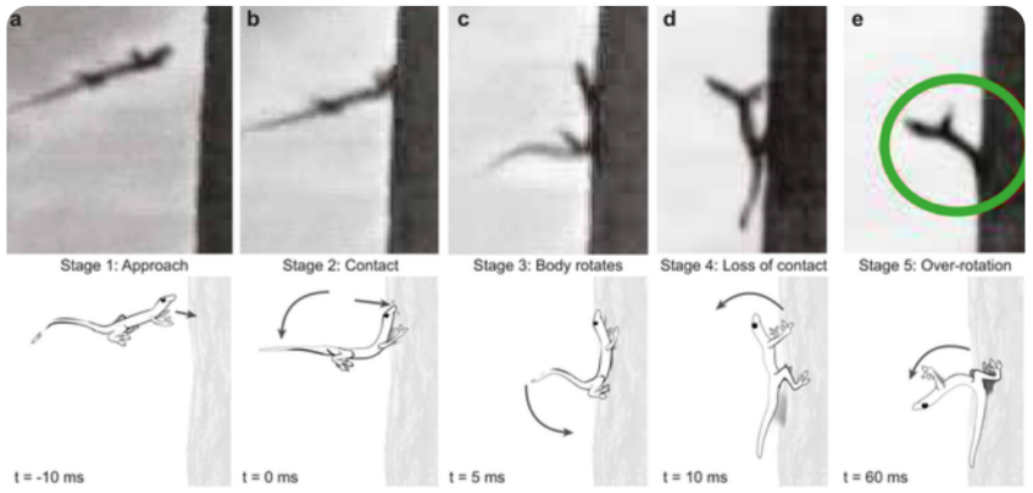
亚洲蜥虎着落轨迹
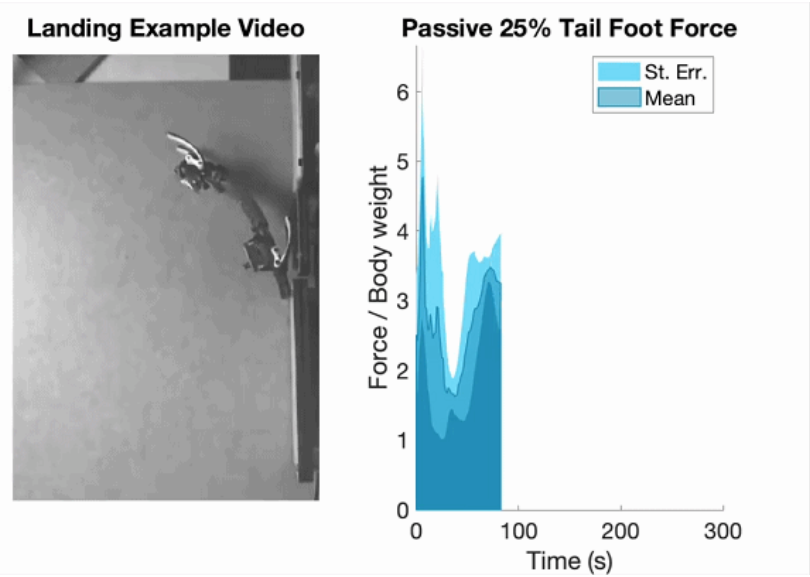
仿生蜥虎柔性机器人着落分析
3.4
柔软可变形传感器在曲面上的保形制造
通过结合直接印刷技术、书写方法,可将金属纳米线,碳纳米管,石墨烯,液态金属合金纳米颗粒、有机纳米薄膜等功能性纳米材料,用于复杂曲面上制作成保形电子器件,提高柔软可变形传感器的制造水平。
3.5
可自主组装多足机器人群
由自然界生物集群行为引发出研究自组装、可重构的模块化群机器人,此类可自行组装的多足机器人,拥有增加运动能力,扩展实际应用范围等显著特点,具有广阔的应用发展前景。
费力爬楼的单体机器人与多体机器人高效爬楼的效果对比
4
未来的发展趋势
随着有效提升聚酰亚胺(PI)、聚对苯二甲酸乙二醇酯(PET)、聚醚酰亚胺(PEI)、聚乙烯奈(PEN)、透明导电聚酯等有机柔性材料的半导体迁移率,改善提高一维材料如碳纳米管(无机)、多类型纳米线(有机/无机),二维材料如石墨烯(无机)、硫化钼(无机),有机发管二极管等材料的特性。柔性电子技术将在柔性电子显示器、薄膜太阳能电池板、射频识别系统、电子皮肤等研究方面取得长足进展,以穿戴式、多元化、智能化等多种型式广泛进入信息、医疗、能源、制造、航空航天、国防、科研等应用领域。
目前人工智能(AI)芯片、人工智能(AI)技术已日臻完善,达到大规模落地,可生产的工业化阶段。深度学习技术深入渗透到各产业,多模态深度语义理解日趋成熟,自然语言处理技术将与各专业领域知识发生深度融合。如人工智能(AI)技术的基于深度学习(DRL)控制器,适用于具有大状态空间,部分涉及测量状态和变量之间呈非线性相关的复杂系统。将助力于先进控制系统,促进控制系统向下一代迭代升级,保持持续稳定的发展。人工智能机器学习的Transformer 模型,是通过迁移学习将在源任务上学习到的知识复用到目标任务。已衍生出T-PTLM模型,将为自然语言处理领域带来新变革,促进第三代人工智能迭代升级的发展。未来在边界、维度、场景三个方向,物联网技术将取得突破性进展,区块链技术、智能交通将应用融入更多场景。作为新型驱动力的量子计算爆发性运用,将为人工智能和云计算带来新活力、新生命。
制造自动化技术发展趋势是制造敏捷化、制造网络化、制造虚拟化、制造智能化、制造全球化、制造绿色化,在智能制造发展中将充分发挥驱动智能制造发展的关键技术,即数字孪生技术的优势。灵活运用集成多学科技术的感知控制、数据集成、模型构建、模型互操作、业务集成、人机交互六大关键核心技术,充分使用模型、数据、智能的分析、预测、判断能力,面向产品作深度聚焦产品全生命周期优化。通过衍生传感器、仿真模型、工业互联网,完善CPS系统并高效连接物理、信息世界,实现仿真产品与现实世界产品的融合。有效提升控制产品质量,实时提供优质高效、智能的服务。同时不断扩展数字孪生的应用场景,实现向产品、生产、商业三大领域价值链全面优化的方向发展。在充分兼顾利用好我国现有的工业互联网、数字孪生架构的前提下,积极发展与制定国际参考架构的美国工业互联网联盟(IIC)、日本工业价值链促进会(IVI)、德国工业4.0机构(RAMI4.0)等欧美日技术标准组织机构的互联融通。积极参加制定国际标准,适时抢占数字孪生技术的国际标准制定权。
5
结语
未来机器人的发展大趋势是达到人机共融,通过柔性电子与人工智能技术在智能制造领域的融合应用,不断迭代更新智能,完善提高机器人情景理解、自然语言交互能力。有效提升机器人的精度和实际操作能力,实现人类、机器人、环境的共融,实现机械、信息、智能化融合发展。面向国家科技创新、国家经济发展、人民生活水平提高的需求,面向世界前沿科技发展的需求,进行针对性研究开发。在战略必争领域积极努力地抢占科技制高点,为国家繁荣富强作出应有的贡献。
审核编辑:刘清
- 控制系统
+关注
关注
41文章
6353浏览量
109924 - 计算机
+关注
关注
19文章
7062浏览量
86725 - CAM
+关注
关注
5文章
199浏览量
42739 - 人工智能
+关注
关注
1787文章
45810浏览量
234142 - 柔性电子
+关注
关注
4文章
167浏览量
15910
原文标题:柔性电子与人工智能技术在智能制造领域的融合应用
文章出处:【微信号:actSMTC,微信公众号:actSMTC】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
串口屏与人工智能的结合
FPGA在人工智能中的应用有哪些?
人工智能技术在集成电路中的应用
人工智能大模型在工业网络安全领域的应用
NLP技术在人工智能领域的重要性
触翔工业主板在人工智能领域的卓越表现
嵌入式人工智能的就业方向有哪些?
人工智能技术在军事情报领域的应用背景

精益生产与人工智能:共创智能制造新篇章!
ai人工智能机器人
智能运维技术的发展和设计资料
人工智能技术在军事情报领域的应用现状和发展趋势






 工商网监
工商网监
评论