 推挽电路的坑,你踩过没?
推挽电路的坑,你踩过没?
在做信号控制以及驱动时,为了加快控制速度,经常要使用推挽电路。推挽电路可以由两种结构组成:上P下N,上N下P。其原理图分别如下所示。
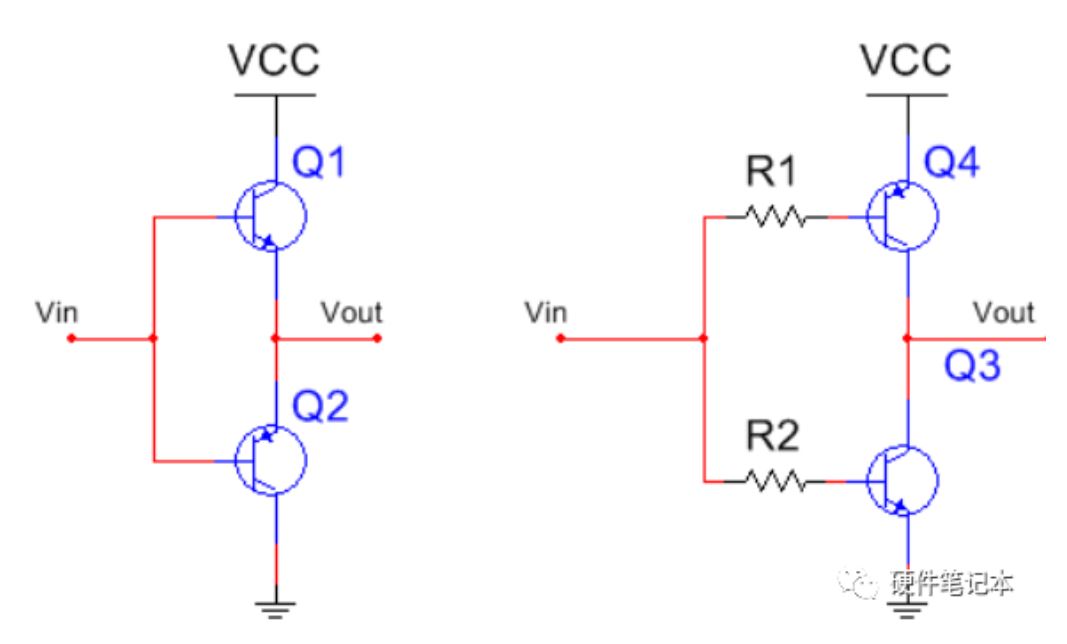
在平时中,我个人经常遇到的推挽电路是第一种。当我每次问身边的工程师:“为什么不选择使用第二种?第二种是上P下N型,这样的管子在实际中用起来,理论中比上N下P型更有优势呀。”但是实际中,从来也没有人正面地回答我,为什么不适用上P下N。或许很多人都会不屑去回答这个问题,但是这个问题确实是电子设计初学者几乎都会考虑的问题。今天我就捋一捋这个小问题。
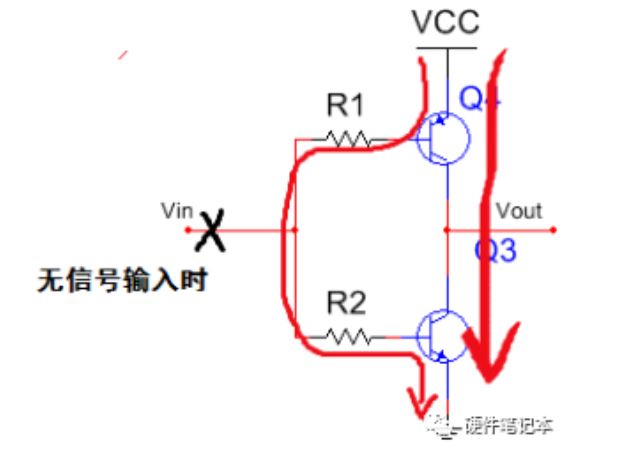
先来看看上N下P型,从该原理图可以知道,其输出信号与输入信号的相位是相同的,即输入时高。输出就是高。但是根据N管的工作特点——N管的输出电压幅值=Vb=0.7V,所以改模型的输出幅值会受到输出信号的限制。所以这对输入信号的幅值要求比较苛刻,否则可能会导致后级的高电平信号不够高。
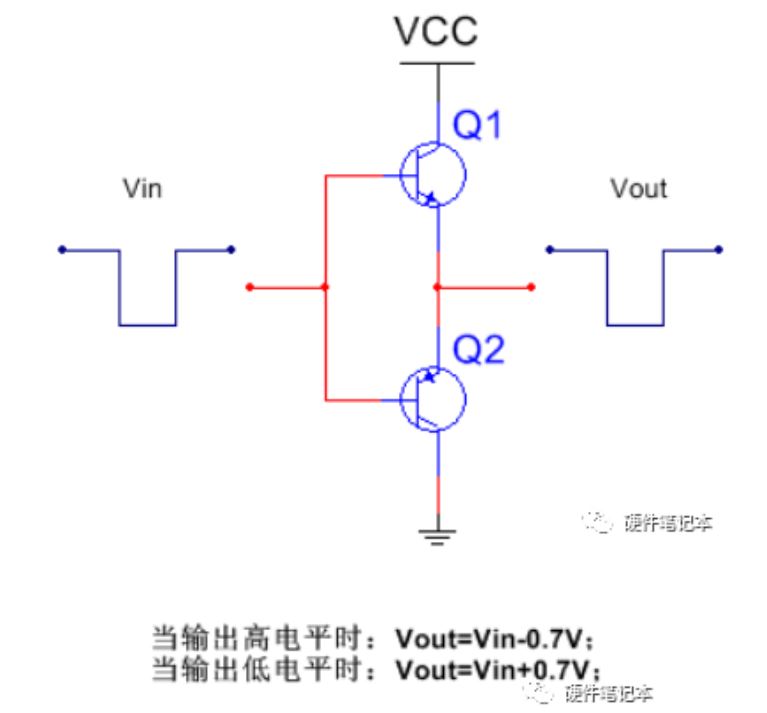
其输出的效果图如上图所示,可能细心的人会发现,当输入信号的高电平低于电源电压时,这意味着上N管的CE节将会承受较高的电压。这也就意味着上管将有着发热坏的风险。
这个结论是存在一定的道理的,但实际中,当推挽电路在做信号控制时,其中流过的电流并不会很大,所以这种情况下,上管也不容易坏。但是如果推挽电路用于驱动负载时,则此时的管子会流过大电流,此时若输入信号幅度较低,则上管的发热量真的会很严重。当然,当输入信号的低电平高于参考电压时,下P管也会存在同样的问题。
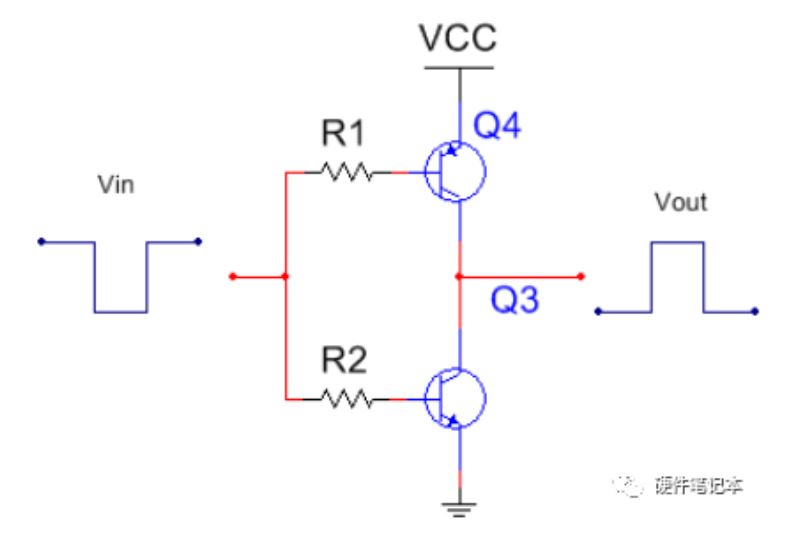
对于上P下N的模型,从原理图可以知道,该模型的输出与输出是反相的。即当输入为高时,输出则为低。
而实际的应用电路中,我们可以将其与上N下P模型进行对比。对比之后可以发现,上P下N模型的三极管基极会串了一个电阻,但是上N下P在实际应用中可以将其省略。上P下N模型中要加这两个电阻的原因是为了将上P管与下N管进行信号隔离。假如不进行信号隔离,从原理图中可以知道,上P管的信号其实是会影响下N管的。
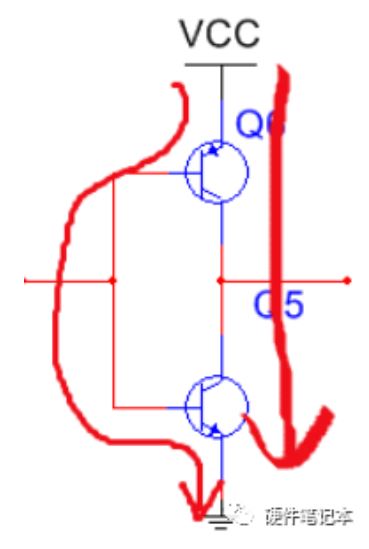
从以上电路中可以知道,当P管导通时,其信号会流经N管,这时就会导致P、N管的串通问题。所以该电阻不能省。可能很多人觉得,加两个电阻没什么,但是如果放在实际生产中,假如一个电阻的价格为0.1分,则生产一千万个产品则意味着“因为这两个电阻,成本将直接地上升一万元。”
另外,我们往往以为加了一个电阻之后就万事大吉了,其实并不是。尽管加了电阻,我们还要严格保证输入端要一直有信号且其信号的幅值足够高,否则一样会导致串通问题。
但是,即使能够保证控制信号的幅值足够高,但是当信号在进行“高——低”转换的时候,其中必会经过一个信号的转换区间,这说明,在信号进行跳变时,依旧会存在串通的问题。要解决这个问题,就要求控制信号的压摆率远远大于三极管的导通时间(即在保证三极管还没做出开关反应时,控制信号就已经完成了信号转换,以避免串通现象)。
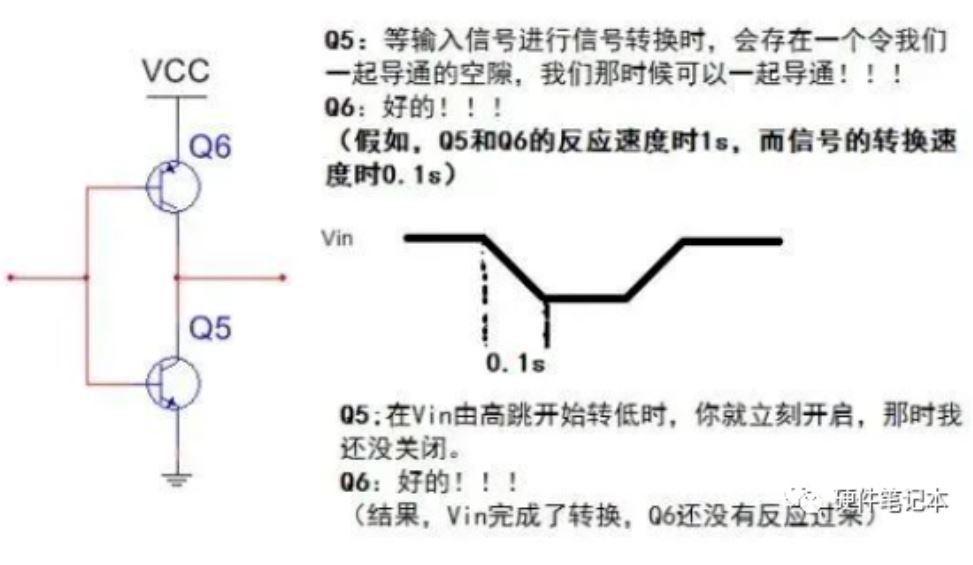
大家可以去查查通用三极管的开关时间,查完之后你或许就会发现,上P下N型推挽电路的要求未免也太苛刻了吧。
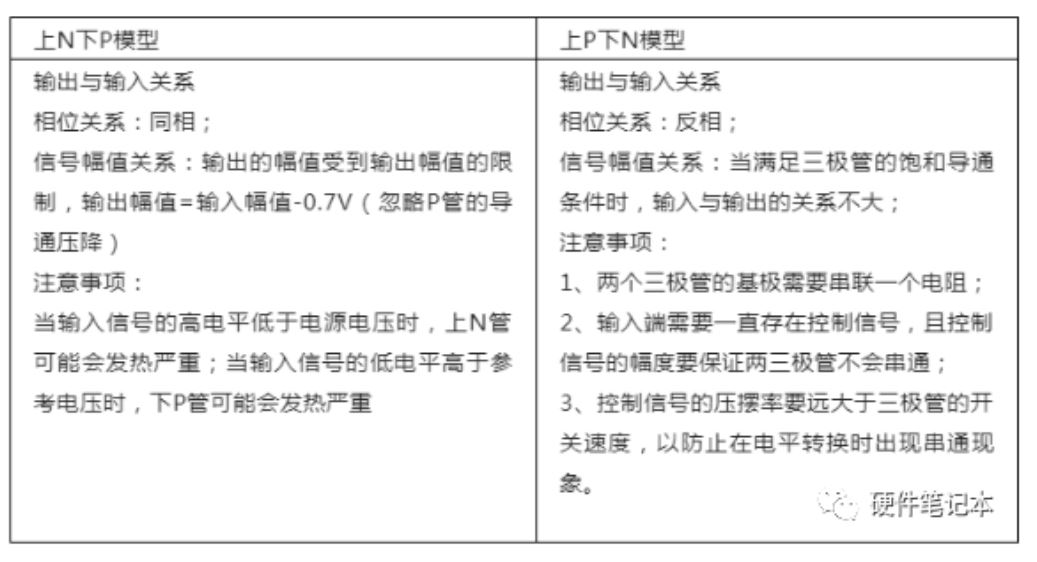
综上所述,我们在实际的应用中往往会选择上N下P型。下表总结了两种模型的特点供大家参考:
当然,上P下N模型只是在栅极型(即三极管模型)中才会存在如此多的缺点,在场效应管(mos管)中还是很受欢迎的。
本文转载自:硬件笔记本微信公众号
审核编辑 黄宇
-
推挽电路
+关注
关注
18文章
113浏览量
37946 -
信号控制
+关注
关注
0文章
40浏览量
9197
发布评论请先 登录
相关推荐
使用STM32采集电池电压踩过的那些坑
开发STM32 USB HID踩过的坑
使用树莓派搭建stm32开发环境踩过的坑以及碰到的问题
移植debian系统踩过的坑
使用STM32采集电池电压踩过的坑资料下载

举例:说明IF函数公式,多条件判断,你一定踩过的坑资料下载






 工商网监
工商网监
评论