 什么是通信模型DDS
什么是通信模型DDS
Hello,大家好,欢迎来到《ROS2入门21讲》,我是主讲人古月。
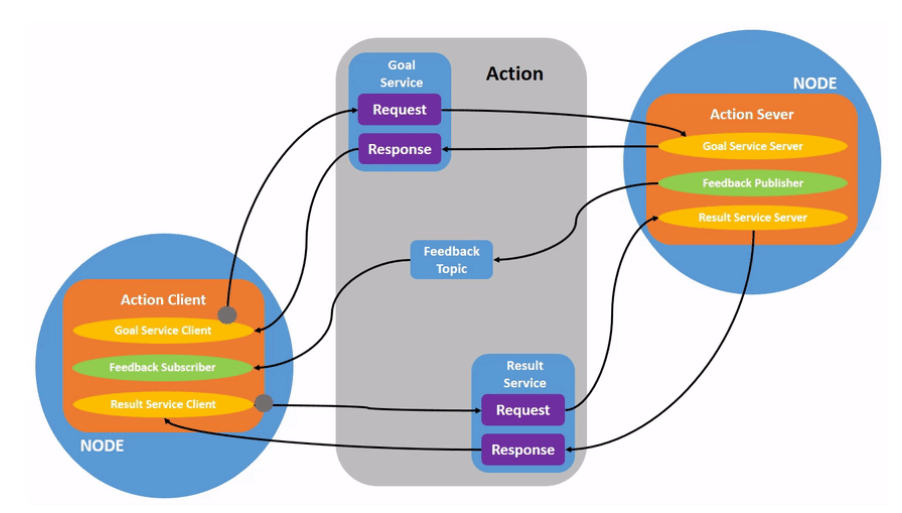
终于讲到ROS2中最为重大的变化——DDS,我们在前边课程中学习的话题、服务、动作,他们底层通信的具体实现过程,都是靠DDS来完成的,它相当于是ROS机器人系统中的神经网络。
通信模型
DDS的核心是通信,能够实现通信的模型和软件框架非常多,这里我们列出常用的四种模型。
第一种,点对点模型,许多客户端连接到一个服务端,每次通信时,通信双方必须建立一条连接。当通信节点增多时,连接数也会增多。
而且每个客户端都需要知道服务器的具体地址和所提供的服务,一旦服务器地址发生变化,所有客户端都会受到影响。
第二种,Broker模型,针对点对点模型进行了优化,由Broker集中处理所有人的请求,并进一步找到真正能响应该服务的角色。
这样客户端就不用关心服务器的具体地址了。不过问题也很明显,Broker作为核心,它的处理速度会影响所有节点的效率,当系统规模增长到一定程度,Broker就会成为整个系统的性能瓶颈。
更麻烦是,如果Broker发生异常,可能导致整个系统都无法正常运转。之前的ROS1系统,使用的就是类似这样的架构。
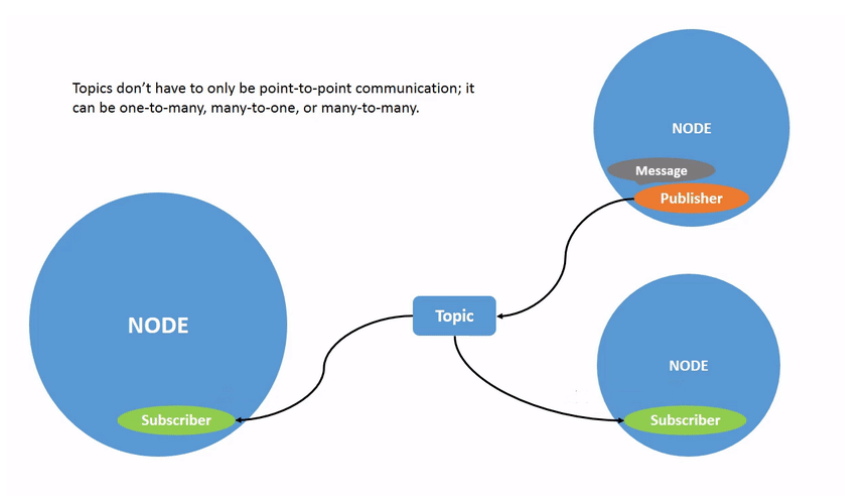
第三种,广播模型,所有节点都可以在通道上广播消息,并且节点都可以收到消息。这个模型解决了服务器地址的问题,而且通信双方也不用单独建立连接,但是广播通道上的消息太多了,所有节点都必须关心每条消息,其实很多是和自己没有关系的。
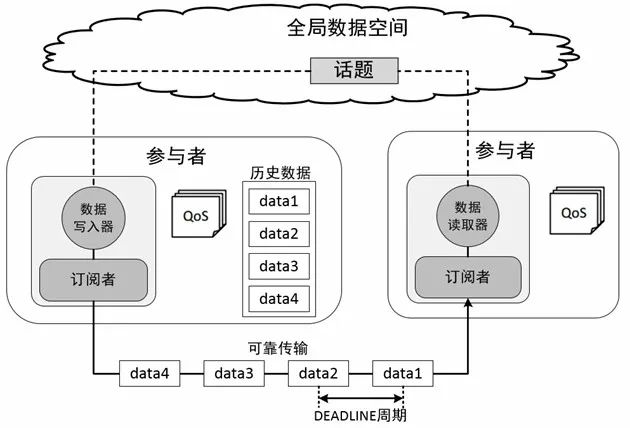
第四种,就是以数据为中心的DDS模型了,这种模型与广播模型有些类似,所有节点都可以在DataBus上发布和订阅消息。
但它的先进之处在于,通信中包含了很多并行的通路,每个节点可以只关心自己感兴趣的消息,忽略不感兴趣的消息,有点像是一个旋转火锅,各种好吃的都在这个DataBus传送,我们只需要拿自己想吃的就行,其他的和我们没有关系。
可见,在这几种通信模型中,DDS的优势更加明显。
DDS
DDS并不是一个新的通信方式,在ROS2之前,DDS已经广泛应用在很多领域。
比如在自动驾驶领域,通常会存在感知,预测,决策和定位等模块,这些模块都需要非常高速和频繁地交换数据。借助DDS,可以很好地满足它们的通信需求。
什么是DDS
好啦,说了半天DDS,到底啥意思呢?我们来做一个完整的介绍
DDS的全称是Data Distribution Service,也就是数据分发服务,2004年由对象管理组织OMG发布和维护,是一套专门为实时系统设计的数据分发/订阅标准,最早应用于美国海军, 解决舰船复杂网络环境中大量软件升级的兼容性问题,现在已经成为强制标准。
DDS强调以数据为中心,可以提供丰富的服务质量策略,以保障数据进行实时、高效、灵活地分发,可满足各种分布式实时通信应用需求。
这里也提一下对象管理组织OMG,成立于1989年,它的使命是开发技术标准,为数以千计的垂直行业提供真实的价值,比如大家课可能听说过的统一建模语言SYSML和UML,还有中间件标准CORBA等,当然还有DDS。
-
机器人
+关注
关注
211文章
28379浏览量
206914 -
通信
+关注
关注
18文章
6024浏览量
135950 -
服务器
+关注
关注
12文章
9123浏览量
85324 -
DDS
+关注
关注
21文章
633浏览量
152630
发布评论请先 登录
相关推荐
MQTT的通信模型及消息
基于VxWorks实时操作系统的通信模型该怎样去设计?
移动Agent位置透明通信模型的设计
过程控制工业以太网通信模型探讨
数据网格中基于优化机制的通信模型
基于VxWorks的通信模型设计

企业资产管理系统中通信模型的研究与实现

基于DDS的云协作研究
电力通信模型自动生成方法及其优化
DDS为ROS的通信系统提供了哪些特性
机器人通信模型有哪些
通信模型的多对多通信、异步通信和消息接口是什么





 工商网监
工商网监
评论