 电源管理入门:驱动Runtime PM管理
电源管理入门:驱动Runtime PM管理
Runtime PM管理也就是设备驱动里面的电源管理,即设备驱动结构体里面的struct dev_pm_ops,只控制设备自己的电源。这样可以在设备不需要工作的时候可以进入到低功耗状态,更好的管理设备自己的电源,所谓:“各扫门前雪”。
为什么需要Runtime PM?
不同于系统的电源管理,设备自己的电源管理更加的细化。这就像一个层级关系,系统整体的是一个大的电源状态管理,但是对于众多的集成外国设备也不能一刀切,就是不能要干活都干活要休息都休息,要细化管理不能懒政,就对每个设备自己也来一套电源状态管理,直接把机制从系统哪里复制过来一份一个阉割版的就够用,采用分而治之的思想,只要系统要统一指挥的时候听话就可以,其他时候可以自己决策执行就是runtime PM管理。这里的设备有可能是外设,比如sensor、lcdc等。这里的设备也有可能是SOC内部的某些IP,比如codec、dsp、usb等。
1. 框架介绍
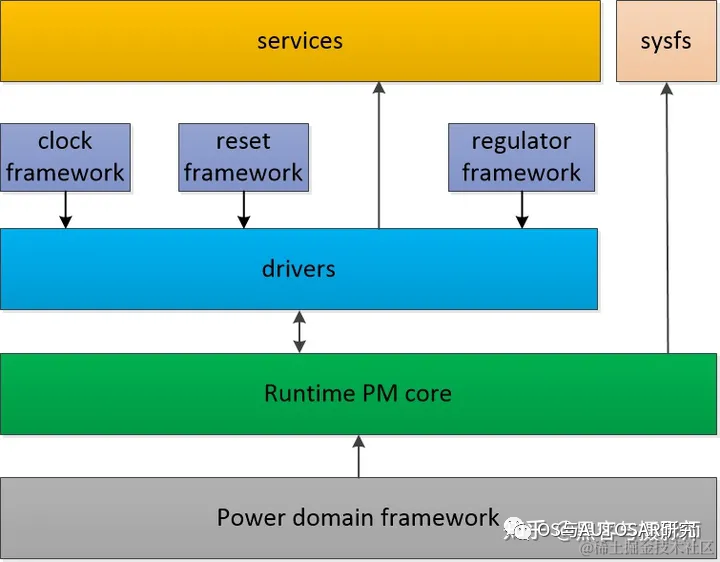
1.1 为什么需要Runtime PM Framework?
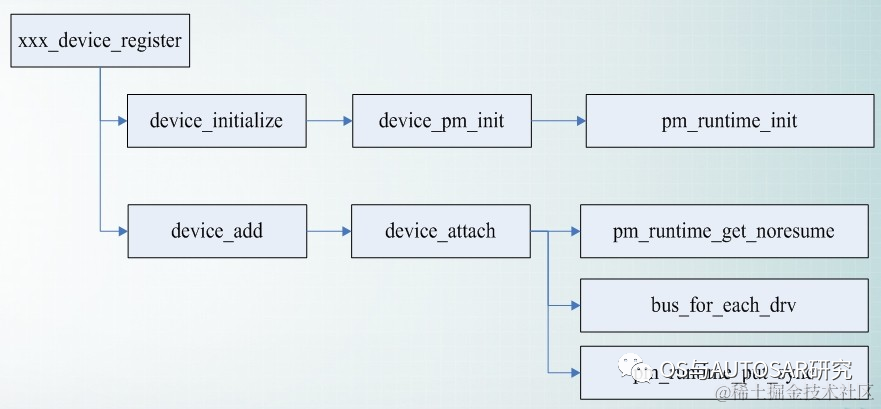
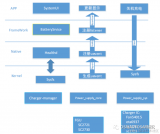
系统基本的电源管理,例如关机休眠等,需要调用device的电源Runtime API就是ops回调函数,而且需要按一个顺序的queue去实施,而且系统跟设备状态发生冲突的时候也需要去处理,综上就需要一个Framework去统一做这些事情
设备驱动需要根据系统的一些参数来决定自己的电源状态,例如CPU是否idle等,就需要系统框架的支持
当设备处于低功耗模式时,wakeup signal常常需要platform或者bus的支持。
1.2 系统框架图
数据结构:
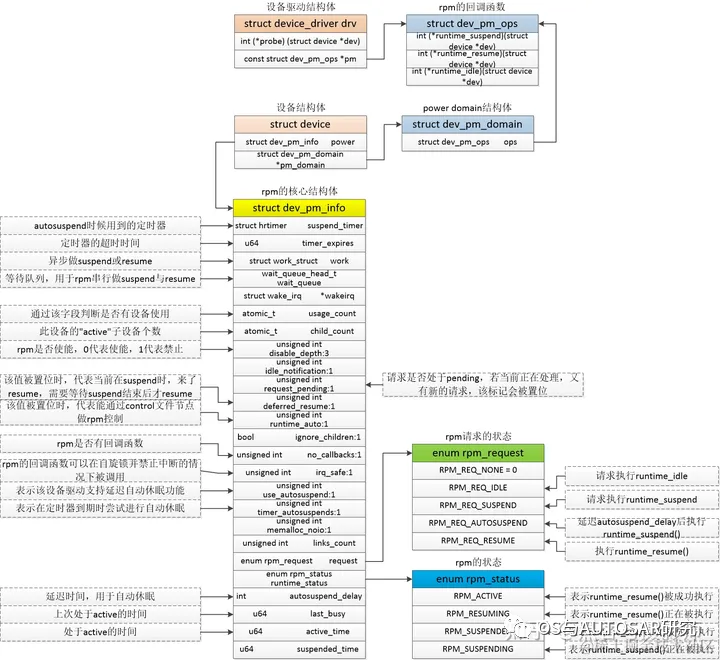
image.png
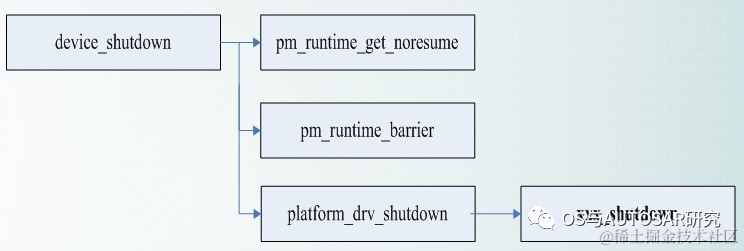
关机举例:
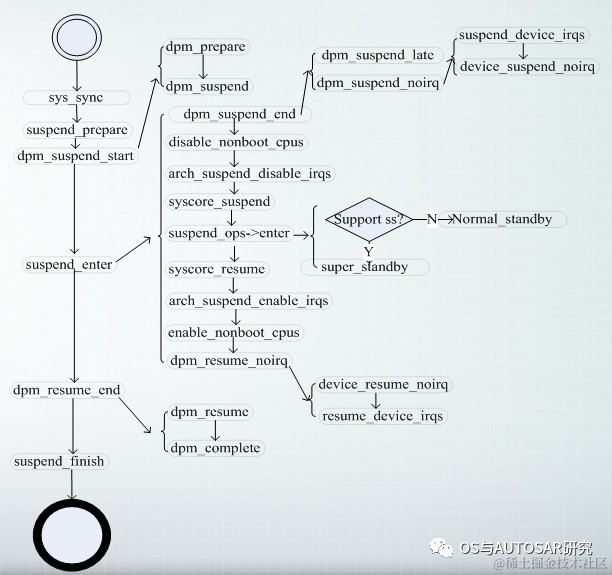
休眠举例:
2. Drivers
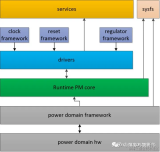
Device drivers(包括bus、class、power domain)实现了runtime pm相关的runtime_idle/runtime_suspend/runtime_resume三个回调:
runtime_suspend用于实现设备的低功耗操作
runtime_resume用于实现设备的低功耗恢复相关的操作
runtime_idle属于runtime_suspend的一个过渡,用于缓冲频繁的suspend与resume,它会判断设备是否具备suspend的条件,如果具备在合适的时机,就会suspend设备。
runtime_suspend与runtime_resume回调函数里会调用clock framework/reset framework/regulator framework提供的时钟开关、复位、电源开关的接口。这里以SPI驱动为例进行说明:
subsys_initcall(pl022_init); staticint __init pl022_init(void) { return amba_driver_register(&pl022_driver); } static struct amba_driver pl022_driver = { .drv = { .name = "ssp-pl022", .pm = &pl022_dev_pm_ops, }, .id_table = pl022_ids, .probe = pl022_probe, .remove = pl022_remove, }; static const struct dev_pm_ops pl022_dev_pm_ops = { SET_SYSTEM_SLEEP_PM_OPS(pl022_suspend, pl022_resume) SET_RUNTIME_PM_OPS(pl022_runtime_suspend, pl022_runtime_resume, NULL) }; #define SET_RUNTIME_PM_OPS(suspend_fn, resume_fn, idle_fn) .runtime_suspend = suspend_fn, .runtime_resume = resume_fn, .runtime_idle = idle_fn,
pm结构体dev_pm_ops 中的有3个以runtime开头的成员函数:runtime_suspend()、runtime_resume()和runtime_idle(),它们辅助设备完成运行时的电源管理
struct dev_pm_ops { ... int (*runtime_suspend)(struct device *dev); int (*runtime_resume)(struct device *dev); int (*runtime_idle)(struct device *dev); ... };
运行时的PM与前文描述的系统级挂起到RAM时候的PM不太一样,它是针对单个设备,指系统在非睡眠状态的情况下,某个设备在空闲时可以进入运行时挂起状态,而在不是空闲时执行运行时恢复使得设备进入正常工作状态,如此,这个设备在运行时会省电。
每个设备处理好自己的电源管理,在不需要工作时进入低功耗状态。也就是"各人自扫门前雪"。Linux提供了一系列API,以便于设备可以声明自己的运行时PM状态:
| 函数名字 | 功能 |
|---|---|
| pm_runtime_suspend | 引发设备的挂起,执行相关的runtime_suspend()函数。 |
| pm_schedule_suspend | “调度”设备的挂起,延迟delay毫秒后将挂起工作挂入pm_wq等待队列,结果等价于delay毫秒后执行相关的runtime_suspend()函数。 |
| pm_runtime_resume | 引发设备的恢复,执行相关的runtime_resume()函数。 |
| pm_request_resume | 发起一个设备恢复的请求,该请求也是挂入pm_wq等待队列。 |
| pm_runtime_idle | 引发设备的空闲,执行相关的runtime_idle()函数。 |
| pm_request_idle | 发起一个设备空闲的请求,该请求也是挂入pm_wq等待队列。 |
| pm_runtime_enable | 使能设备的运行时PM支持。 |
| pm_runtime_disable | 禁止设备的运行时PM支持。 |
| pm_runtime_getpm_runtime_get_sync | 增加设备的引用计数(usage_count),这类似于clk_get(),会间接引发设备的runtime_resume()。 |
| pm_runtime_putpm_runtime_put_sync | 减小设备的引用计数,这类似于clk_put(),会间接引发设备的runtime_idle()。 |
3. Runtime PM core
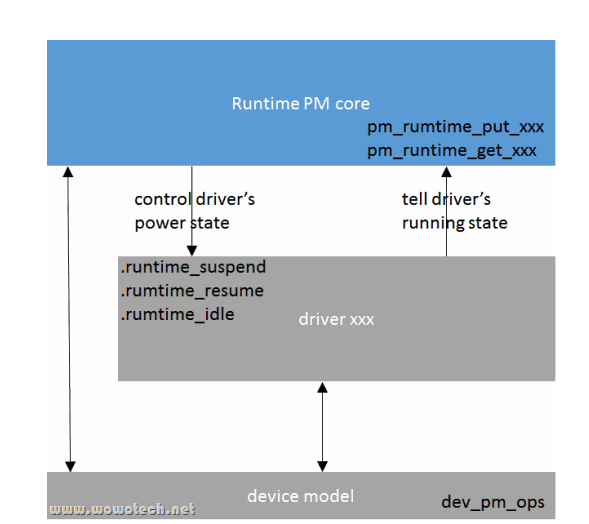
Runtime pm core主要提供了三类函数接口:
提供enable/disable接口给设备驱动,用于该设备驱动决定是否打开或关闭RPM,
提供get、put类接口给设备驱动,用于决定什么时候进入或者恢复设备低功耗,
在设备驱动调用了get、put接口后RPM会调用各设备驱动实现的runtime_suspend/runtime_resume接口。
对于决定设备是否进入低功耗的get/put接口的调用时机,一般会在操作设备相关寄存器前调用get接口,在操作完相关寄存器后调用put接口。或者在设备驱动的open、release、start、stop等接口里调用,用户层的services通过ioctrl或者驱动提供的文件节点调用驱动的这些接口。
我们可以这样简单地理解Linux运行时PM的机制,每个设备(总线的控制器自身也属于一个设备)都 有引用计数usage_count和活跃子设备(Active Children,子设备的意思就是该级总线上挂的设备)计数child_count,当两个计数都为0的时候,就进入空闲状态,调用pm_request_idle(dev)。
当设备进入空闲状态,与pm_request_idle(dev)对应的PM核并不一定直接调用设备驱动的runtime_suspend(),它实际上在多数情况下是调用与该设备对应的bus_type的runtime_idle()。
在具体的设备驱动中,一般的用法则是在设备驱动probe()时运行pm_runtime_enable()使能运行时PM支持,在运行过程中动态地执行“pm_runtime_get_xxx()->做工作->pm_runtime_put_xxx()”的序列。如代码清单19.19中的drivers/watchdog/omap_wdt.c OMAP的看门狗驱动。
在omap_wdt_start()中启动了pm_runtime_get_sync(),
而在omap_wdt_stop()中调用了pm_runtime_put_sync()。
static const struct watchdog_ops omap_wdt_ops = { .owner = THIS_MODULE, .start = omap_wdt_start, .stop = omap_wdt_stop, .ping = omap_wdt_ping, .set_timeout = omap_wdt_set_timeout, .get_timeleft = omap_wdt_get_timeleft, }; static int omap_wdt_start(struct watchdog_device *wdog) { pm_runtime_get_sync(wdev->dev);//告诉内核要开始用看门狗这个设备了,如果看门狗设备已经进入省电模式(之前引用计数为0且执行了运行时挂起),会导致该设备的运行时恢复 static int omap_wdt_stop(struct watchdog_device *wdog) { pm_runtime_put_sync(wdev->dev);//告诉内核不用这个设备了,如果引用计数变为0且活跃子设备为0,则导致该看门狗设备的运行时挂起。
在一些设备上不使用的时候不能立即挂起,,因为挂起状态的进入和恢复需要一些时间,如果设备不在挂起之间保留一定的时间,频繁进出挂起反而会带来新的开销。因此,我们可根据情况决定只有设备在空闲了一段时间后才进入挂起(一般来说,一个一段时间没有被使用的设备,还会有一段时间不会被使用),基于此,一些设备驱动也常常使用自动挂动模式进行编程。
在执行操作的时候声明pm_runtime_get(),操作完成后执行pm_runtime_mark_last_busy()和pm_runtime_put_autosuspend(),一旦自动挂动的延时到期且设备的使用计数为0,则引发相关runtime_suspend()入口函数的调用。
设备驱动PM成员的runtime_suspend()一般完成保存上下文、切到省电模式的工作,而runtime_resume()一般完成对硬件上电、恢复上下文的工作
4. power domain framework
一个power domain上可能包含多个IP,每个IP可能对应一个或多个设备。这些设备会在dts中描述与power domain的绑定关系。系统初始化的时候,会将这个power domain放到一个链表中,然后根据设备中dts描述的与power domain的关系,将设备挂在power domain节点下的链表中。
当某个设备驱动通过put接口调用,将usage_count从1减少到0,这时会先调用power domain注册的runtime_suspend接口,在这个接口中,会先调用该设备驱动的runtime_suspend,然后遍历该power domain下所有的设备是否都允许suspend(各设备驱动的usage_count是否为0),若允许就会直接调用关闭power domian的接口,否则直接返回。当某个设备驱动通过get接口调用,将usage_count从0增加到1,这时会先调用power domain注册的runtime_resume接口,在这个接口中,会先将power domain上电,然后再调用设备驱动对应的runtime_resume回调函数,让设备退出低功耗。
5. runtime pm的sysfs
对于支持rpm的设备,在相应的设备节点下有多个rpm相关属性的文件节点,分别为control,runtime_susupend_time,runtime_active_time,autosuspend_delay_ms,runtime_status。接口在文件: /kernel/drivers/base/power/sysfs.c中描述。
/sys/devices/.../power/control
on - 调用pm_runtime_forbid接口,增加设备的引用计数,然后resume设备。
auto - 调用pm_runtime_allow接口,减少设备的引用计数,如果设备的引用计数为0,则idle设备。
/sys/devices/.../power/runtime_status
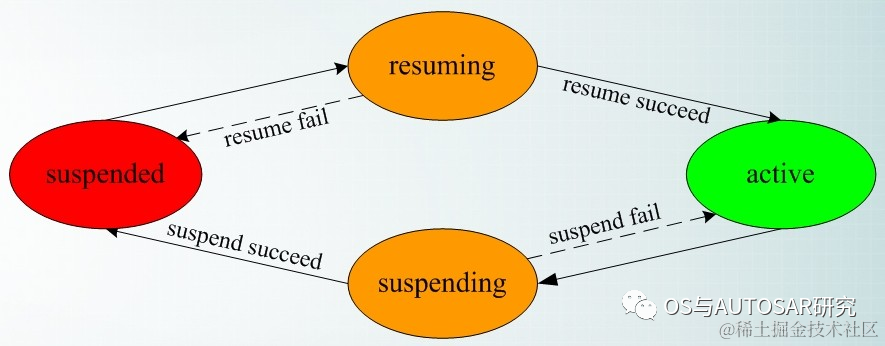
active - 设备的状态是正常工作状态。
suspend- 设备的状态是低功耗模式。
suspending-设备的状态正在从active->suspend转化。
resuming-设备的状态正在从suspend->active转化。
error-设备runtime出现错误,此时runtime_error的标志置位。
unsupported-设备的runtime 没有使能,此时disable_depth标志置位。
/sys/devices/.../power/runtime_suspend_time
设备在suspend状态的时间
/sys/devices/.../power/runtime_active_time
设备在active状态的时间
/sys/devices/.../power/autosuspend_delay_ms
设备在idle状态多久之后suspend,设置延迟suspend的延迟时间。
后记:
在编写驱动的时候,如果涉及电源管理的功耗需求,就需要实现struct dev_pm_ops,为驱动程序增加一个电源管理的功能,会更加的灵活,也是我们去优化系统功耗的一个重要方向。因为大多数程序估计是供应商提供的,但是我们自己的加的硬件的程序估计是我们自己去写的,并且做业务挺耗电,给自己写的驱动加个电源管理就挺好。
- 电源管理
+关注
关注
114文章
6084浏览量
142822 - cpu
+关注
关注
68文章
10640浏览量
208667 - soc
+关注
关注
38文章
3978浏览量
216704 - 函数
+关注
关注
3文章
4214浏览量
61849 - runtime
+关注
关注
0文章
17浏览量
2151
原文标题:电源管理入门-16 驱动Runtime PM管理
文章出处:【微信号:OS与AUTOSAR研究,微信公众号:OS与AUTOSAR研究】欢迎添加关注!文章转载请注明出处。
发布评论请先登录
相关推荐
Linux电源管理:RuntimePM的软件框架
电源管理入门-Regulator驱动是什么?Regulator的作用是什么?

电源管理入门:Thermal热管理

电源管理入门:Power supply子系统
电源管理入门:Power Domain管理
电源管理入门:Hypervisor中的电源管理

Linux电源管理的系统架构和驱动
Linux电源管理之GenericPMSuspend功能简析
Linux电源管理--PMQoS

驱动篇:inux电源管理的系统架构和驱动(一)





 工商网监
工商网监
评论