 简单认识伺服系统
简单认识伺服系统
来源:书香半岛
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在自动化领域很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和其他形式的反馈控制系统没有原则上的区别。
伺服在自动化半导体设备中的应用极其广泛,例如在涂胶机,***等设备上均有。
伺服驱动系统(ServoSystem)简称伺服系统,是一种以机械位置或角度作为控制对象的自动控制系统,例如数控机床等。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、转动惯量(使用在机电系统中的伺服电机的转动惯量较大,为了能够和丝杠等机械部件直接相连。伺服电机有一种专门的小惯量电机,为了得到极高的响应速度。但这类电机的过载能力低,当使用在进给伺服系统中时,必须加减速装置。转动惯量反映了系统的加速度特性,在选择伺服电机时,系统的转动惯量不能大于电机转动惯量的3倍。)较大等特点,这类专用的电机称为伺服电机。当然,其基本工作原理和普通的交直流电机没有什么不同。该类电机的专用驱动单元称为伺服驱动单元,有时简称为伺服,一般其内部包括电流、速度和/或位置闭环。
伺服(Servo)是一个性能上的名词,一般只要主令和控制结果的近似达到了一定高的程度就能称为伺服,这和机器的结构没有直接的关系。例如伺服系统都没有精确的惯量匹配的范围,这是因为惯量匹配的结果只要不影响控制对象对主令跟随或影响不大就好了,跟具体是3还是3.5没有关系。伺服系统也不一定是电机系统,有的气动系统就称为气动伺服。
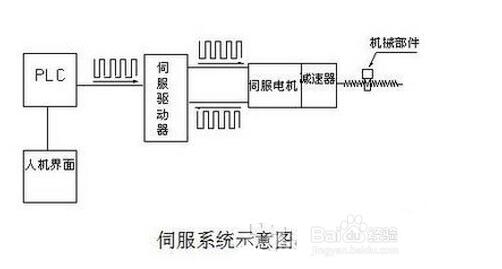
伺服系统由伺服电机、伺服驱动器、指令机构三大部分构成,伺服电机是执行机构,就是靠它来实现运动的,伺服驱动器是伺服电机的功率电源,指令机构是发脉冲或者给速度伺服驱动器的,常用的驱动元件有IPM模块。上位机:给伺服指令,如PLC、工控机、数控系统等;伺服放大器:接收并处理上位机的指令,控制电机转动角度和速度;伺服电机:执行机构,其自带的编码器把电机旋转的角度和速度反馈给伺服放大器,构成闭环,确保精度!
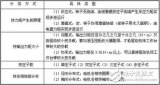
1、控制器通常是计算机或PID控制电路,主要任务是对比较元件输出的偏差信号进行变换处理,控制执行元件按要求动作。
2、执行环节,其作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作,机电一体化系统中的执行元件一般指各种电机或液压,气动伺服机构等。
3、被控对象,机械参数量包括位移、速度、加速度、力和力矩为被控对象。
4、比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
5、检测环节,能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统本质上是一种随动系统。只不过被控量是位移或是其对时间的导数。如果要问什么是随动系统,就是一个系统的输出尽可能以最快,最精确的方式复现输入信号。其衡量的指标有超调量、延迟。下面就关于伺服电机的相关问题作出了整理,希望在今后的工作中能带来帮助.
1.伺服电机为什么不会丢步?
伺服电机驱动器接收电机编码器的反馈信号,并和指令脉冲进行比较,从而构成了一个位置的半闭环控制。所以伺服电机不会出现丢步现象,每一个指令脉冲都可以得到可靠响应。
2.对伺服电机进行机械安装时,应特别注意什么?
由于每台伺服电机后端部都安装有旋转编码器,它是一个十分易碎的精密光学器件,过大的冲击力肯定会使其损坏。
3.如何调节伺服电机,调节伺服电机有几种方式?
使用泰科智能图像化软件对电机的PID参数、电机参数、电子齿轮比等进行调节。
A.为了保证控制系统改变不大,应选用数字式伺服系统,仍可采用原来的脉冲控制方式;
B.由于伺服电机都有一定过载能力,所以在选择伺服电机时,经验上可以按照所使用的步进电机输出扭矩的1/3来参考确定伺服电机的额定扭矩;
C.伺服电机的额定转速比步进电机的转速要高的多,为了充分发挥伺服电机的性能,最好增加减速装置,让伺服电机工作在接近额定转速下,这样也可以选择功率更小的电机,以降低成本。
5.用脉冲方式控制伺服电机的优点?
一可靠性高,不易发生飞车事故。用vwin 电压方式控制伺服电机时,如果出现接线接错或使用中元件损坏等问题时,有可能使控制电压升至正的最大值。这种情况是很危险的。如果用脉冲作为控制信号就不会出现这种问题。
二 信号抗干扰性能好。数字电路抗干扰性能是模拟电路难以比拟的。
当然目前由于伺服驱动器和运动控制器的限制,用脉冲方式控制伺服电机也有一些性能方面的弱点。一是伺服驱动器的脉冲工作方式脱离不了位置工作方式,二是运动控制器和驱动器如何用足够高的脉冲信号传递信息。
这两个根本的弱点使脉冲控制伺服电机有很大限制。
(1)控制的灵活性大大下降。
这是因为伺服驱动器工作在位置方式下,位置环在伺服驱动器内部。这样系统的PID参数修改起来很不方便。当用户要求比较高的控制性能时实现起来会很困难。从控制的角度来看,这只是一种很低级的控制策略。如果控制程序不利用编码器反馈信号,事实上成了一种开环控制。如果利用反馈控制,整个系统存在两个位置环,控制器很难设计。在实际中,常常不用反馈控制,但不定时的读取反馈进行参考。这样的一个开环系统,如果运动控制器和伺服驱动器之间的信号通道上产生干扰,系统是不能克服的。
(2)控制的快速性速度不高。
6.伺服电机通电以前应做哪些检查工作?
检查电机与驱动器的连线,连线不能虚连,线不能接错。
7.控制伺服时,给信号时,伺服电机不转,振动?
U,V,W三相接错。
8.如何根据客户的要求为客户选配伺服电机和减速机,所选的方案应为最佳。
根据功率选取减速机,选出合适的减速机尺寸,在根据减速机选择合适的伺服电机,一定要注意速度的选取。
审核编辑:汤梓红
-
控制器
+关注
关注
112文章
16332浏览量
177795 -
plc
+关注
关注
5010文章
13270浏览量
463024 -
电动机
+关注
关注
74文章
4109浏览量
96194 -
伺服系统
+关注
关注
14文章
572浏览量
39205
原文标题:什么是伺服系统?伺服系统的组成和基础知识问答
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

步进电机开环伺服系统解析,开环步进伺服系统的工作原理
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成
伺服系统什么意思_伺服系统的作用是什么
伺服系统应用于哪儿_伺服系统应用实例
交流伺服系统的特点有哪些
交流伺服系统的分类及应用场合
机电伺服系统有哪些_机电伺服系统工作原理
交流伺服系统的分类及应用场合






 工商网监
工商网监
评论