 基于单片机的步进电机控制系统设计
基于单片机的步进电机控制系统设计
一、项目简介:
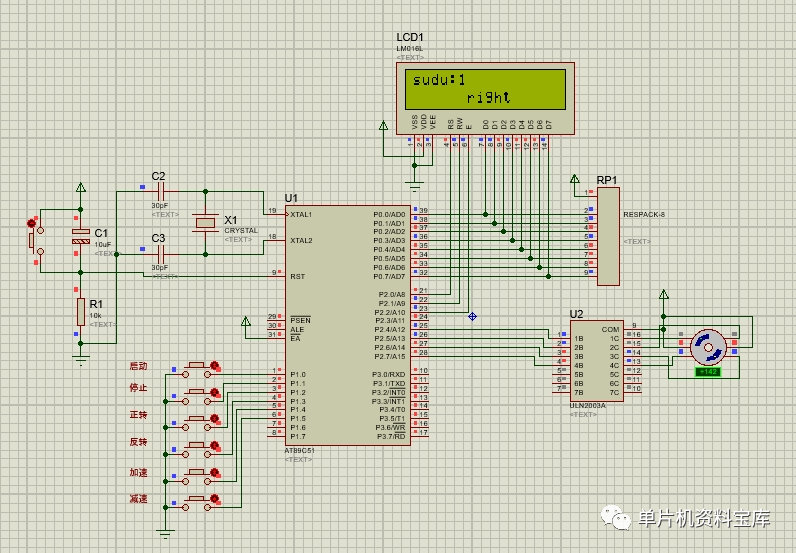
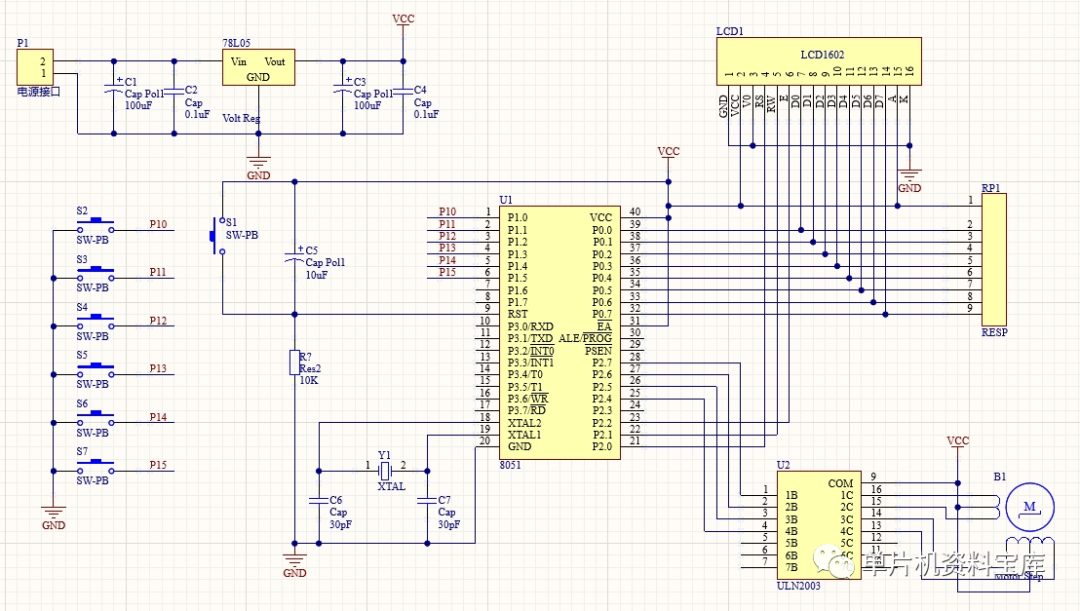
该项目利用51单片机实现了一个步进电机控制系统,可以实现步进电机的正反转、加减速、启动和停止,并通过LCD显示电机的工作状态。通过该系统,你可以控制步进电机启动、旋转的方向和速度。
二、主要功能:
- 步进电机正反转:通过控制电机驱动器的输入信号,可以实现步进电机的正反转运动。
- 加减速控制:通过逐渐增加或减小步进电机的脉冲频率,可以实现电机的加速和减速运动。
- 启动和停止控制:通过控制步进电机的脉冲信号,可以启动和停止电机的旋转运动。
- LCD显示电机工作状态:通过连接LCD显示模块,可以实时显示电机的工作状态,包括方向、速度和状态等信息。
三、硬件组成:
- 51单片机开发板:作为主控制器,负责接收用户输入并控制步进电机运动。
- 步进电机:用于驱动机械装置,实现旋转运动。
- 步进电机驱动器:用于接收51单片机的控制信号,并驱动步进电机进行运动。
- LCD显示模块:用于显示电机的工作状态信息。
元件清单:
| 元件 | 型号 | 数量 |
|---|---|---|
| 单片机 | AT89C51 | 1 |
| 晶振 | 12MHZ | 1 |
| 电阻 | 10k | 1 |
| 电容 | 10uf | 1 |
| 电容 | 30pf | 1 |
| 按钮 | 7 | |
| 驱动器 | ULN2003 | 1 |
| 步进电机 | 4相5线 | 1 |
| 显示器 | LCD1602 | 1 |
| 排阻 | 10k | 1 |
四、软件设计:
- 硬件初始化:初始化51单片机和LCD显示模块。
- 用户输入处理:通过按键或其他输入方式接收用户的指令,包括方向、速度和操作等参数。
- 控制信号生成:根据用户输入的参数,生成相应的控制信号,控制步进电机的运动。
- 状态显示:将步进电机的工作状态信息通过LCD显示出来,包括方向、速度和状态等。
五、项目优势:
- 灵活性:可以根据用户的需求,通过用户输入控制步进电机的运动方式和参数。
- 实时反馈:通过LCD显示模块实时显示电机的工作状态,方便用户了解电机的运行情况。
- 简单易用:基于51单片机的设计简单,容易理解和实现。
六、部分代码
#include "reg51.h"
#include "lcd1602.h"
#define uchar unsigned char
#define uint unsigned int
sbit AA=P2^4;//步进电机
sbit BB=P2^5;
sbit CC=P2^6;
sbit DD=P2^7;
sbit k1=P1^0;//按钮
sbit k2=P1^1;
sbit k3=P1^2;
sbit k4=P1^3;
sbit k5=P1^4;
sbit k6=P1^5;
uchar flag=0,fang=0;//方向控制
uchar speed=0,time=0;//速度控制0-9
uchar start=0;//启动
uchar sec=0;
uchar disp1[]="sudu:0 ";//速度
//主函数
void main()
{
init_1602();
TMOD|=0X01;
TH0=(65536-10000)/256;
TL0=(65536-10000)%256;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
while(1)
{
//按键检测
if(!k1)//启动
{
start=1;
}
if(!k2)//停止
{
start=0;
}
if(!k3)//正转
{
fang=0;
}
if(!k4)//反转
{
fang=1;
}
if(!k5)//加速
{
if(speed<9)
speed++;
while(!k5);
}
if(!k6)//减速
{
if(speed>0)
speed--;
while(!k6);
}
}
}
//定时器中断
void Timer0() interrupt 1
{
if(start==1)//启动
{
if(time<10-speed)//速度0-9
{
time++;
}
else
{
time=0;
if(fang==0) //正转
{
switch(flag)
{
case 0:BB=1;break;
case 1:AA=0;break;
case 2:CC=1;break;
case 3:BB=0;break;
case 4:DD=1;break;
case 5:CC=0;break;
case 6:AA=1;break;
case 7:DD=0;
}
if(flag<7)//下一个状态
flag++;
else
flag=0;
}
else //反转
{
switch(flag)
{
case 0:DD=1;break;
case 1:AA=0;break;
case 2:CC=1;break;
case 3:DD=0;break;
case 4:BB=1;break;
case 5:CC=0;break;
case 6:AA=1;break;
case 7:BB=0;
}
if(flag<7)//下一个状态
flag++;
else
flag=0;
}
}
}
//=================显示
if(sec<50)//0.5s
sec++;
else
{
sec=0;
disp1[5]=speed+0x30;//速度
write_string(1,0,disp1);
if(start)
{
if(fang==0)
{
write_string(2,6,"right");
}
else
{
write_string(2,6,"left ");
}
}
else
{
write_string(2,6,"stop ");
}
}
TH0=(65536-10000)/256;
TL0=(65536-10000)%256;
}
七、原理图
-
单片机
+关注
关注
6034文章
44554浏览量
634560 -
驱动器
+关注
关注
52文章
8226浏览量
146245 -
控制系统
+关注
关注
41文章
6603浏览量
110573 -
步进电机
+关注
关注
150文章
3109浏览量
147437 -
开发板
+关注
关注
25文章
5032浏览量
97370
发布评论请先 登录
相关推荐
【每日分享】基于单片机的步进电机控制系统设计(二)
怎样去设计一种基于51单片机的步进电机控制系统?
基于51单片机的步进电机控制系统






 工商网监
工商网监
评论