 KUKA C4机器人:为宏启用或阻止内联窗体USER
KUKA C4机器人:为宏启用或阻止内联窗体USER
对于不同的宏类型,可以配置内联表单USER是否可用。默认情况下,USER在以下宏中可用:
•自定义宏
•宏观步骤(全部)
makrotrigger
•宏触发器
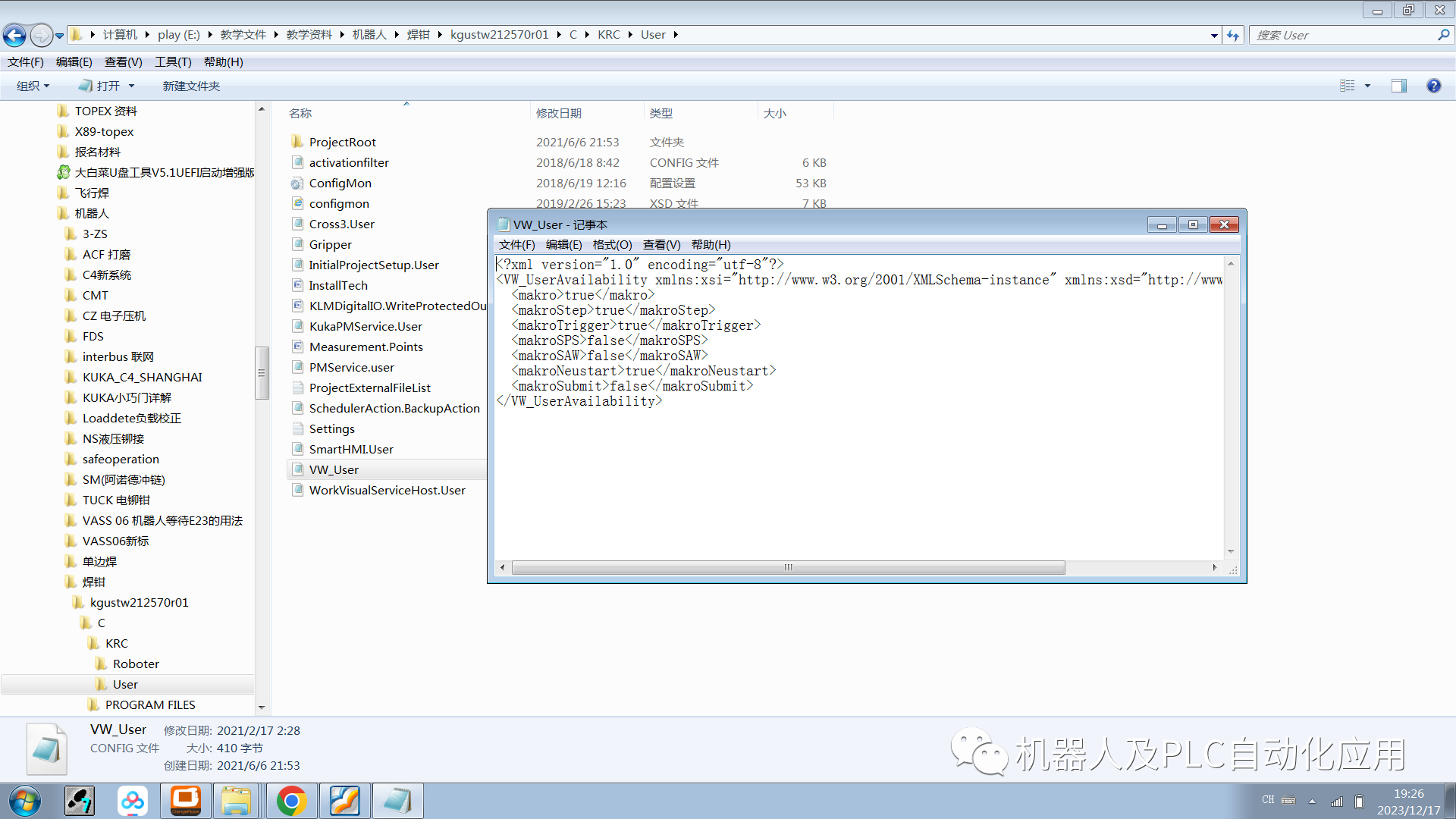
使用默认设置文件VW_User.config
1.在智能HMI上C:KRCUSER目录下的文件VW_USER。打开CONFIG。
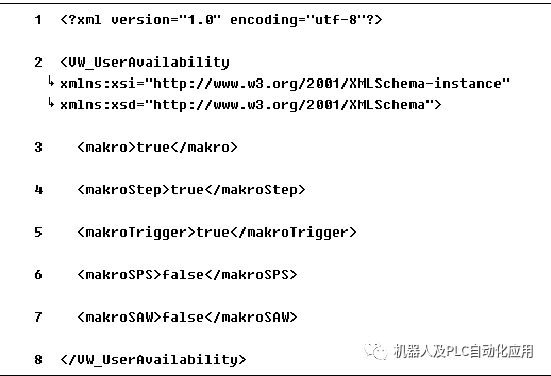
该文件包含每个宏类型的一行,类型名称和值为true或false。
2.要使内联表单USER在宏中可用,请将该值设置为true。
若要锁定宏中的内联窗体,请将值设置为false。
3.使用关闭图标关闭文件。对于是否应保存更改的安全问题,回答“是”。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
触发器
+关注
关注
14文章
2000浏览量
61129 -
HMI
+关注
关注
9文章
587浏览量
48539 -
KUKA机器人
+关注
关注
4文章
143浏览量
9071
原文标题:KUKA C4机器人:为宏启用或阻止内联窗体USER
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
的自适应性和自主性,赋能机器人在多种场景中的应用。
例如,在家庭自动化领域,具身智能机器人能够感知家庭成员的日常习惯和需求,自动执行清洁、整理或其他家务任务。它们通过观察家庭成员的活动模式和反应,逐渐
发表于 11-11 10:20
使用机器学习和NVIDIA Jetson边缘AI和机器人平台打造机器人导盲犬
Selin Alara Ornek 是一名富有远见的高中生。她使用机器学习和 NVIDIA Jetson 边缘 AI 和机器人平台,为视障人士打造了机器人导盲犬。
该项目名为 I
特斯拉将于2025年正式启用人形机器人
7月23日,据国际媒体报道,特斯拉首席执行官埃隆·马斯克宣布了一项重要计划:特斯拉将于明年正式启用其研发的人形机器人。这一消息通过马斯克在社交媒体平台X(即原先的Twitter)上的一则推文于7月
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简
ROS系统是一个开源免费,架构精简的机器人操作系统。ROS被设计为尽可能精简,以便为ROS编写的代码可与其
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
工业机器人仿真软件有哪些
功能强大的机器人仿真和离线编程软件,支持多种机器人品牌,如Fanuc、KUKA、ABB等。它提供了丰富的工具,如3D可视化、碰撞检测、路径优化等。 CoppeliaSim (前称V-REP) :CoppeliaSim 是一款开源

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,为工业自动化提供了一套切实可行的方案。
本文针对基于机器视觉的工业机器人进行研究,主要工作包括以下几点:
(1)设计了基于 伊瑟特的六自由度机器人视觉伺服控制系统总体方案。以 E
发表于 05-29 16:17
宏集智能机器人控制系统驱动高效生产
宏集MC系列控制器结合CODESYS编程环境和宏集SC安全控制器,为用户提供全方位的智能机器人运动控制解决方案,帮助提升生产效率和可靠性。

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
大的吸力,有效清除各类污渍和颗粒物。同时,低噪音设计使得机器在工作时不会打扰到家庭成员的休息或工作。此外,无刷电机的寿命更长,减少了用户的维护成本,提高了产品的性价比。
2.扫地机器人智能化程度的提升
发表于 05-05 15:03
华数机器人合力打造产业发展生态
3月8日,重庆市两江新区党工委副书记、管委会副主任许宏球莅临华数机器人调研,两江新区产业促进局局长杨虹、两江新区科创局局长向悦文、两江投资集团总经理尹晓华等领导陪同,华数机器人董事长王群、总经理杨
KUKA C4/C58.6以上系统的工具/基坐标管理窗口
采用 XYZ 参考法时,首先使用已知的工具移向一个参考点,然后使用待测工具移向参考点。机器人控制器比较法兰位置,并计算出新工具的 TCP。
发表于 01-31 12:22
•929次阅读

【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
Emo是一款基于树莓派4做的个人伴侣机器人,集时尚与创新于一身。它不仅仅是一款机器人,更是一个活生生的存在,与其他机器人不同,它拥有独特的个性和情感。
硬件部分
树莓派
发表于 12-26 15:18





 工商网监
工商网监
评论