 机器视觉运动控制一体机在喇叭跟随点胶上的应用
机器视觉运动控制一体机在喇叭跟随点胶上的应用
市场应用背景
点胶是通过使用多种粘合剂,实现产品密封、绝缘、导热和耐腐蚀等作用,可应用于多类产品的生产制造场景,例如3C消费电子、汽车新能源、光伏和半导体等领域。
点胶是喇叭生产过程中必不可少一道工艺,音圈是扬声器的重要部件,点胶质量直接影响扬声器的质量。在保质保量的喇叭点胶市场高需求下,传统的手工点胶或中小型半自动点胶机无法适应工厂灵活批量生产作业的需求。
传统点胶解决方案在扬声器行业中存在的问题:
传统点胶解决方案是采用人工或中小型半自动点胶机,进行手动点胶或上下料等操作,无法适应工厂批量生产作业。同时针对不同规格的产品,需频繁停机更换治具等一系列问题,导致生产效率低下,精度不高等问题。

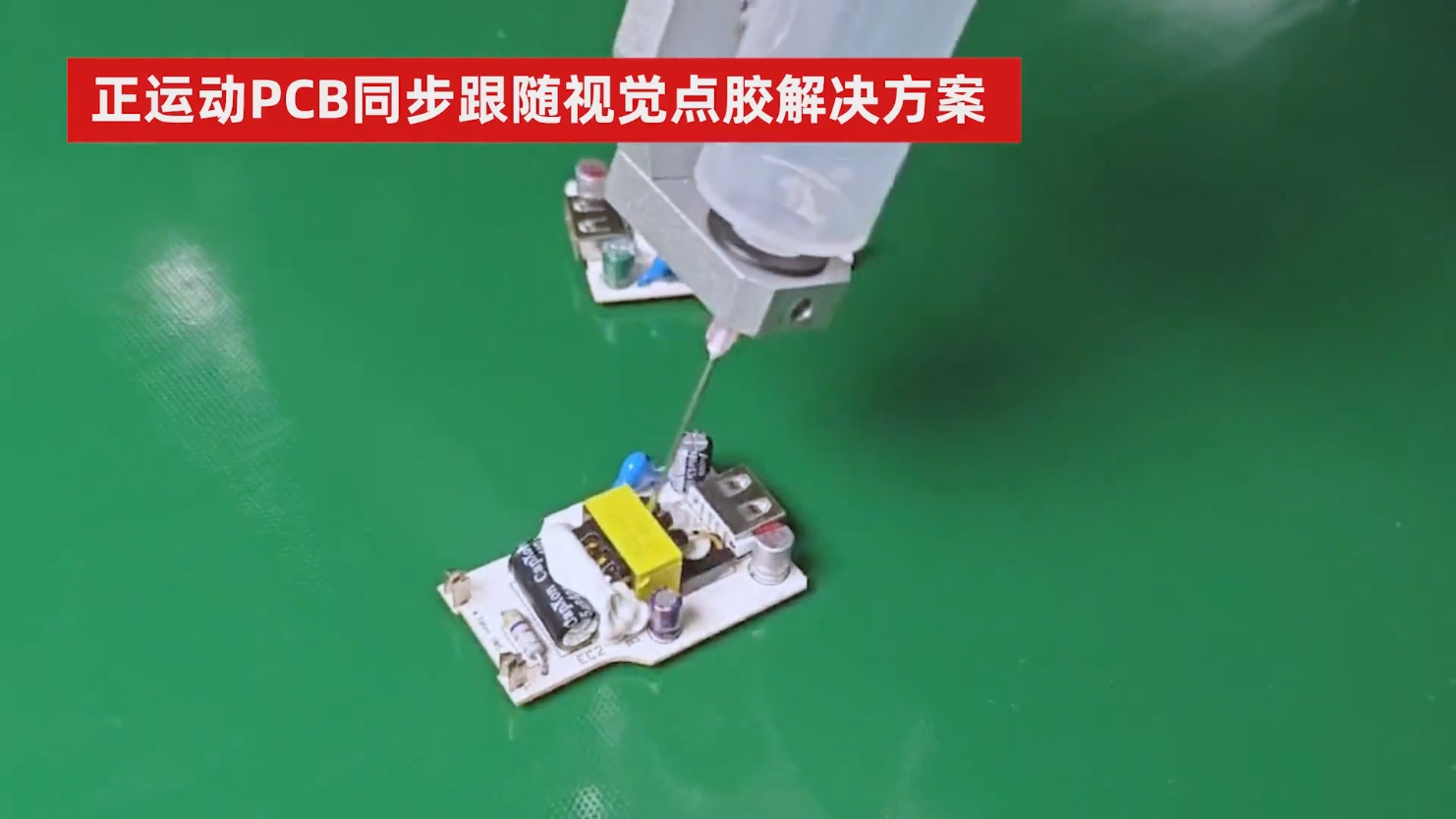
正运动技术视觉点胶整体解决方案:
在此背景下,正运动技术的视觉点胶整体解决方案脱颖而出,方案是基于VPLC系列机器视觉运动控制一体机开发,适用于皮带线跟随点胶作业的视觉点胶解决方案。
正运动技术的视觉点胶整体解决方案可应用于不同规格喇叭的外圈、中管、内部等填充环节中,使点胶位置更加准确,可实现点胶路径规划、适用于大批量生产、无需夹具固定、高效稳定的场景应用。
支持高速PSO、PWM、速度前瞻等功能,可确保点胶加工轨迹平滑,控制胶点稳定输出大小,提高产品品质和产能,可规避传统系统存在的问题。同时支持点胶轨迹打点、线、圆、弧、连续线段提前开关胶、手动示教、相机示教、点胶工艺功能。
01 正运动视觉点胶整体解决方案在喇叭跟随点胶上的应用
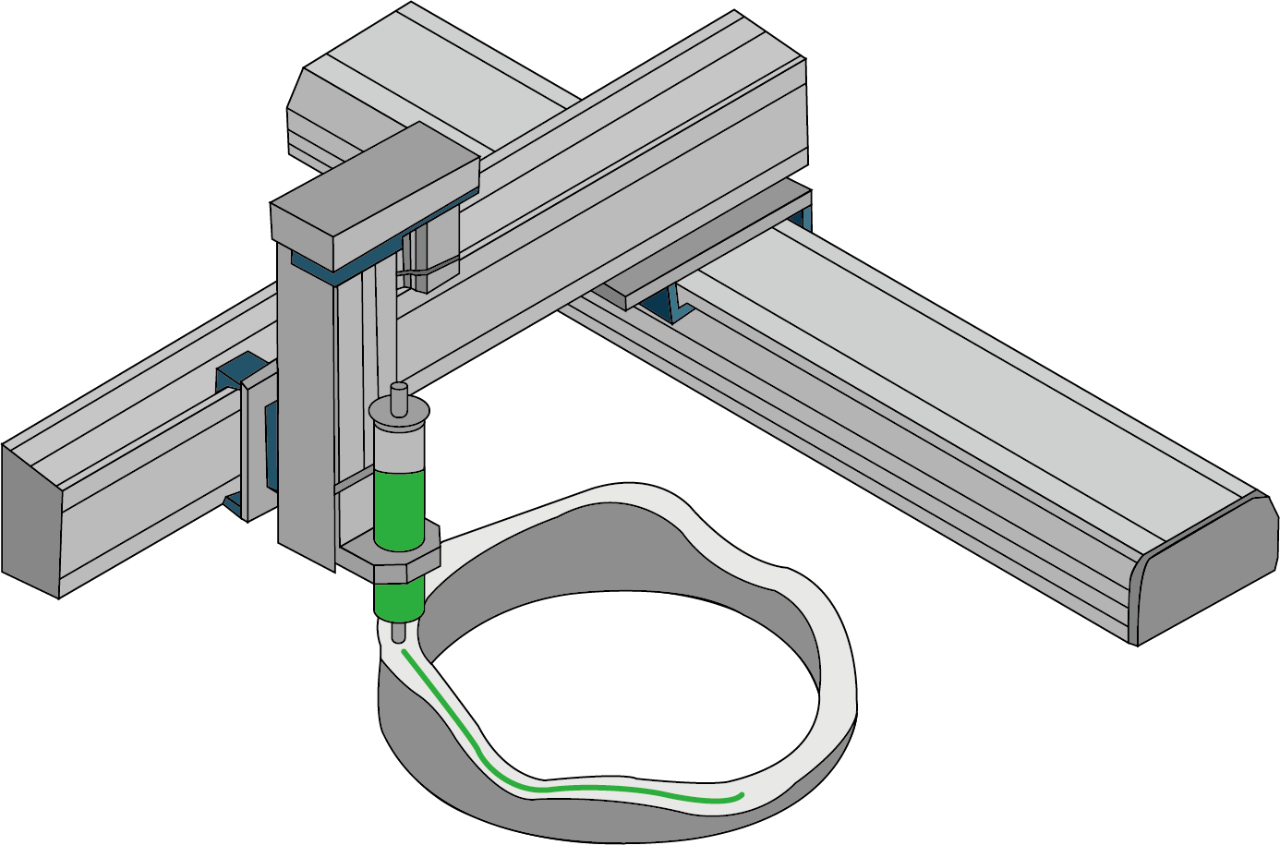
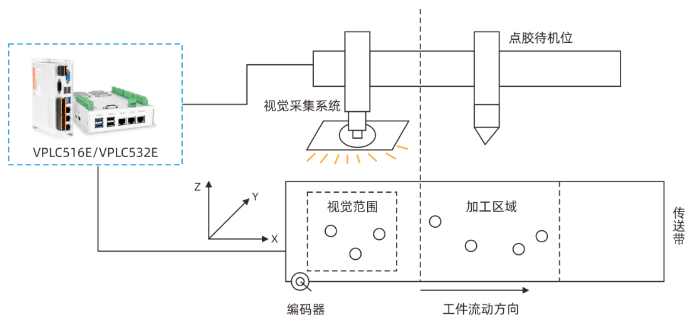 皮带线喇叭跟随点胶加工示意图
皮带线喇叭跟随点胶加工示意图
传统点胶加工方案痛点
●批量生产节拍根据不上市场生产需求;
●材料的耗材运营成本较高和停机更换治具调整点胶参数配方时间长;
●中小型半自动点胶设备难以整合到现有生产线中,实现在线柔性制造;
●运动控制与视觉项目程序独立开发,软硬件集成度不高,开发难度较大;
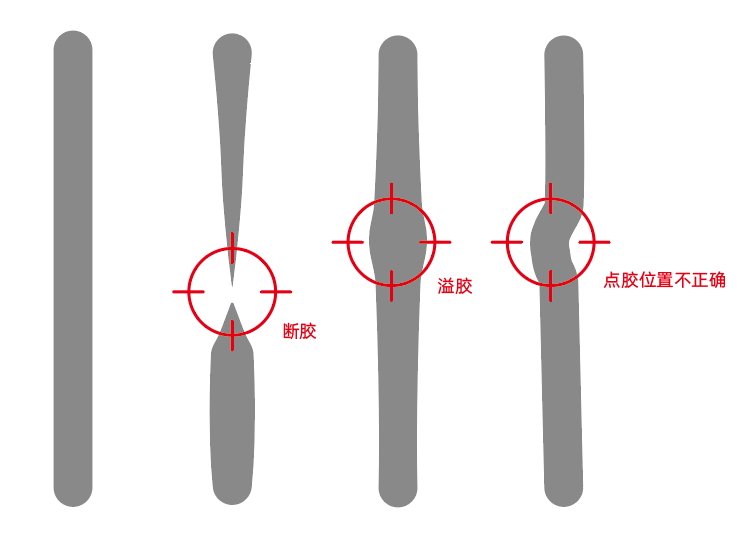
●点胶一致性不高,导致胶水不能够准确地涂布成特定的图案,如圆形、虚线和弧形等复杂形状。
正运动技术方案设计
●24DI:接原点、限位等传感器,以及开关信号等;
●12DO:高速输出口接工业相机的硬触发输入;
●EtherCAT接口:接EtherCAT总线驱动器,控制其它轴运动;
●6个脉冲轴接口:接XYZ脉冲驱动器、编码器和皮带轴;
●EtherNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位、纠偏应用。
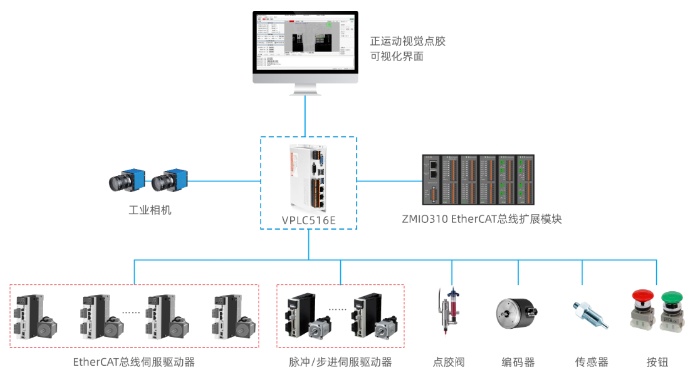
VPLC系列机器视觉运动控制一体机
VPLC系列机器视觉运动控制一体机是一款基于Linux系统的EtherCAT总线视觉运动控制器,可脱机运行,内置了丰富的视觉和运动控制功能,大幅简化视觉与运控项目的配置流程,核内数据交互快,可显著降低时间和成本投入。
VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。
(1)VPLC516E机器视觉运动控制一体机
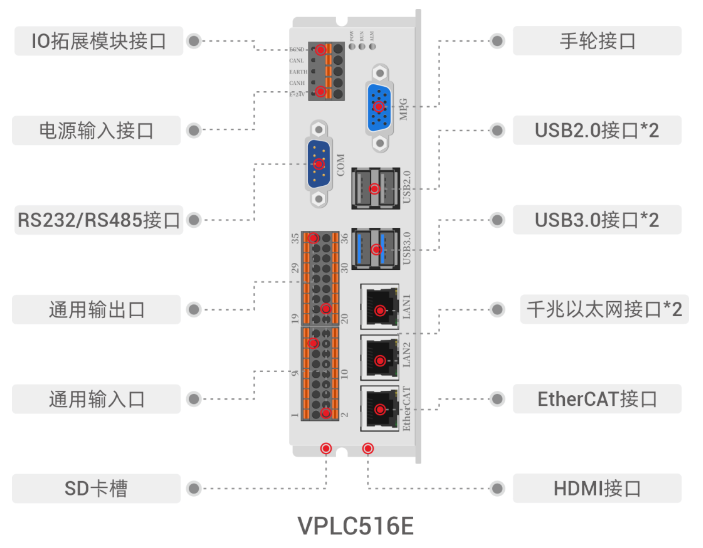
VPLC516E机器视觉运动控制一体机,可选16-32轴运动控制,支持16数字输入,16数字输出,2路高速锁存输入,2路高速PWM和PSO硬件输出,4路单端脉冲输出,速度可达500KHz。
(2)VPLC532E机器视觉运动控制一体机
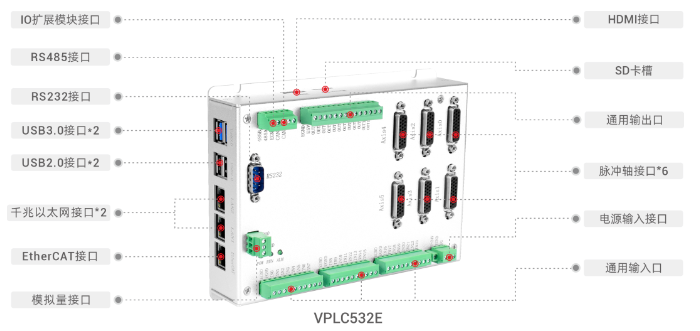
VPLC532E机器视觉运动控制一体机,本身最多支持32轴,支持24+6数字输入,12+6数字输出,4路高速锁存输入,4路高速PWM和PSO硬件输出,自带6路高速脉冲轴+编码器反馈,速度可达10M。
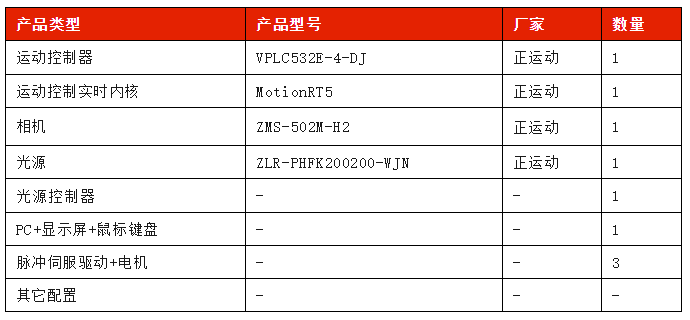
解决方案硬件配置
运动控制与机器视觉实现过程
(1)机器视觉
主要使用了模板匹配功能,通过视觉对皮带线上拍摄范围内运动目标进行识别,这一过程主要通过预先设定的特征,如形状、尺寸、Mark点等来实现目标识别,最后获取识别出目标的运动轮廓轨迹,便于产品到达加工区域,点胶头自动进行预设的轮廓逐个产品点胶加工。
(2)运动控制
通过计算分析编码器位置,实时监测产品在皮带线上的运行速度,进行坐标偏移计算,以动态调整点胶头的位置,这样产品移动时也能确定点胶位置。
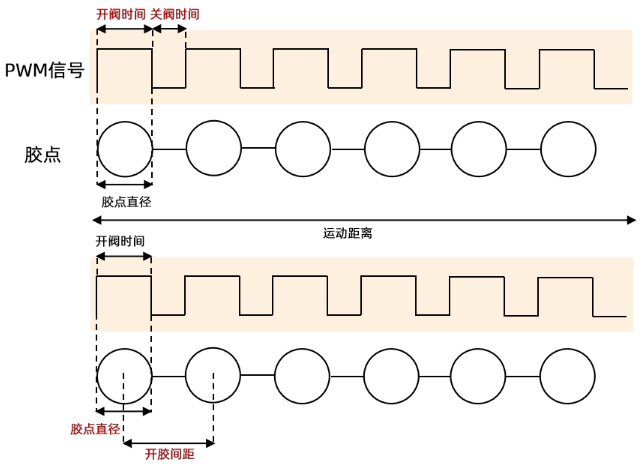
再通过PSO和PWM功能精准控制点胶过程,PSO控制点胶等间距输出周期,PWM调节胶水的流量,确保在拐角处不会出现胶水堆积现象,保证了点胶的均匀性。
最后,通过位置同步跟随功能,系统能够持续调整点胶头的位置,以同步于皮带线上产品的实时轨迹位置。
系统动作流程
1.上料
将待加工的产品放置在流水线皮带上以待点胶处理。
2.视觉拍照
可选软触发或硬件触发相机拍照,通过传感器信号触发相机拍照,另一路接至控制器锁存输入,实时监测产品拍照时流水线的编码器当前位置。
3.模板匹配,坐标校准,排序加工
对拍摄的图像进行模板匹配和坐标校准,确定实际加工坐标,并按照优化的顺序对产品进行排序加工。
4.工件位置纠偏
根据图像识别结果进行位置纠偏,得到产品的点胶加工轨迹。
5.点胶模组加工
当产品到位时,点胶模组从待机位置出发,与皮带线同步后,下降到加工位置并按预设轨迹进行点胶,完成后关闭点胶阀,并撤销跟随动作。
6.返回待机位
完成点胶后,点胶模组返回待机位置。若有下一个产品待加工,模组则直接调整返回路径以进行下一产品的加工。
方案应用优势

●成本效益与空间优化:结合视觉与运动控制,无需额外配置工控机,从而节约成本并减少安装空间;
●优化传统点胶工艺流程:具备提前开关胶、拐角减速和硬件位置比较输出,确保胶水的精准喷涂,有效减少材料浪费,降低运营成本;
●灵活性与易安装性:设备安装简便,具备高度的灵活性,可快速更换产线,无需复杂的拆装过程;
●提高自动化程度:根据点胶速度自动调节皮带线速度,实现多位置、高自由度的点胶作业;
●生产效率提升:点胶过程中皮带线持续运动,无需停顿,显著提高整个产线的生产效率;
●可大批量进行点胶加工:减少对人工操作的依赖,节省时间和人力,适用于无人车间和高度自动化的生产环境。
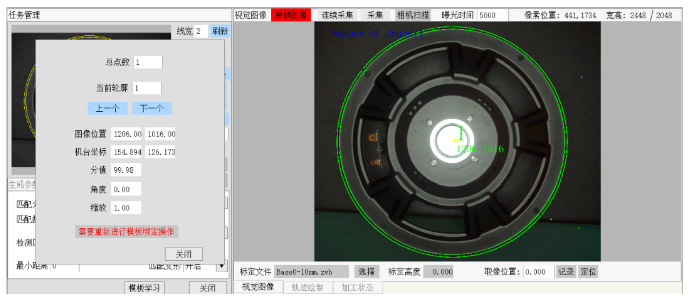
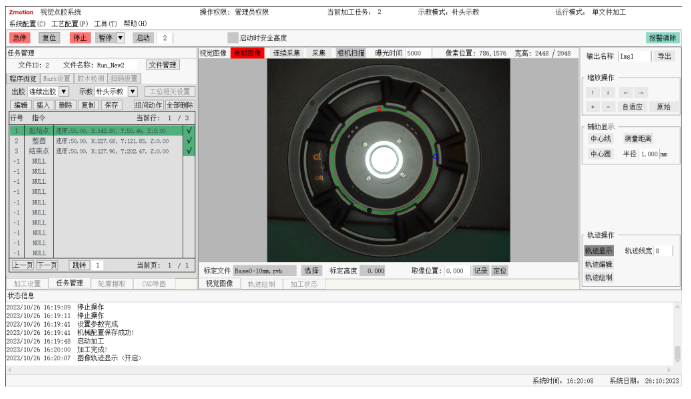
02 提供易用的可视化视觉点胶开发调试软件

正运动技术通过不断深化扩展VPLC系列视觉运动控制一体机在点胶行业的应用,为用户提供了简单易用的视觉点胶开发调试软件。该软件结合可视化界面和丰富的视觉、运动控制功能,只需进行简单的参数设置,即可构建视觉点胶项目程序,可大幅缩短项目开发周期,降低开发成本。
视觉点胶开发调试软件功能介绍
(1)功能齐全
支持点胶轨迹打点、线、圆、弧、连续线段、阵列、提前开关胶、手动示教、相机示教、点胶工艺功能。
(2)机器视觉纠偏
产品任意位置和角度摆放,视觉自动识别并完成点胶、喷胶作业。
(3)操作界面友好功能齐全
调试编程操作简单便捷,支持在视觉图像上进行示教和点动运动。
审核编辑 黄宇
-
机器视觉
+关注
关注
161文章
4369浏览量
120278 -
一体机
+关注
关注
0文章
890浏览量
32707 -
运动控制
+关注
关注
4文章
579浏览量
32855
发布评论请先 登录
相关推荐








 工商网监
工商网监
评论