 耐用通讯 Canopen 转 modbus 网关在改造项目中的应用
耐用通讯 Canopen 转 modbus 网关在改造项目中的应用
关键字:Canopen转Modbus RTU、canopen机器人、视觉采集、
一、 摘要
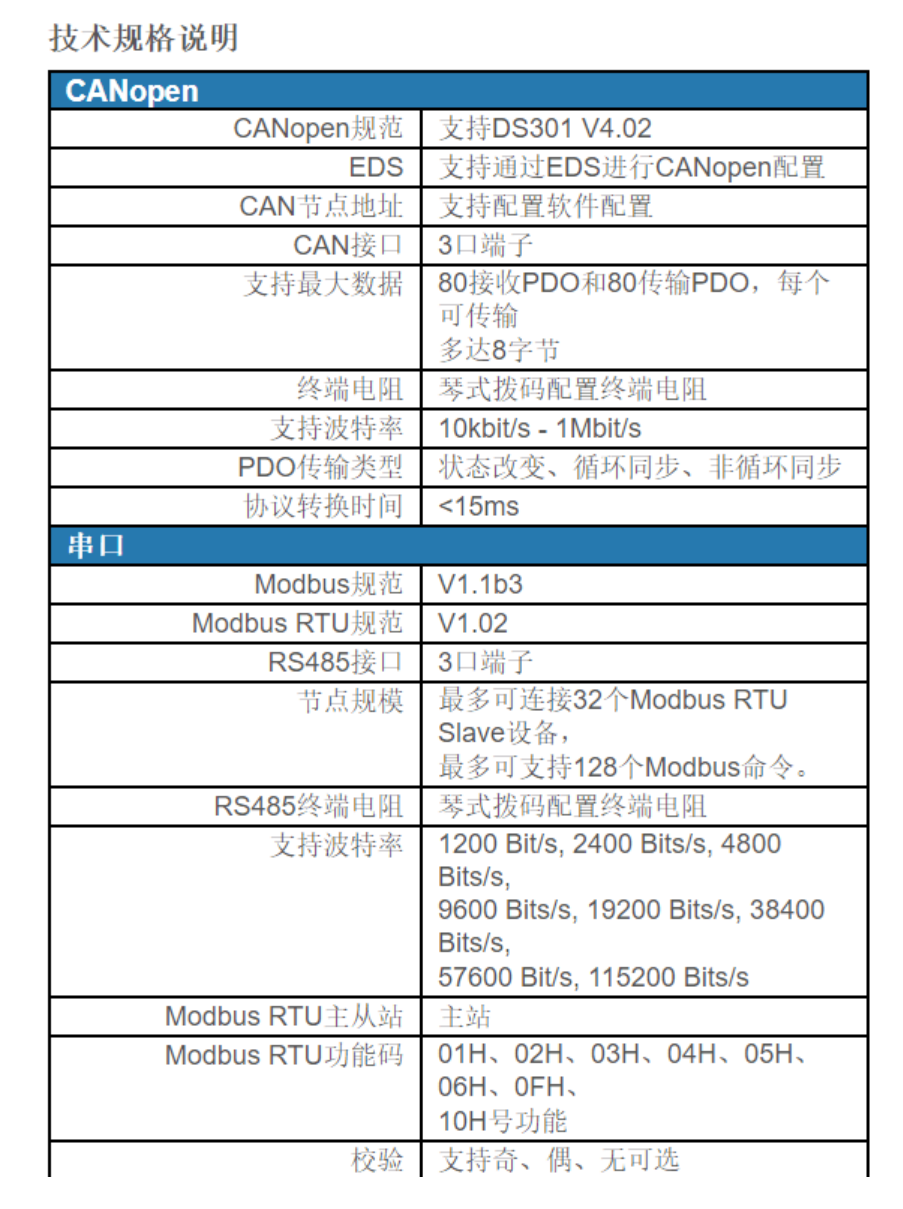
客户要求是在工厂项目改造中,将六轴机器人控制器与工业照相机进行通讯,机器人控制器协议为canopen,照相采集器协议为Modbus通讯。客户需求是将作为canopen主站的机器人控制器与作为Modbus从站的采集器进行通讯所以选用了我司的canopen转modbus网关。

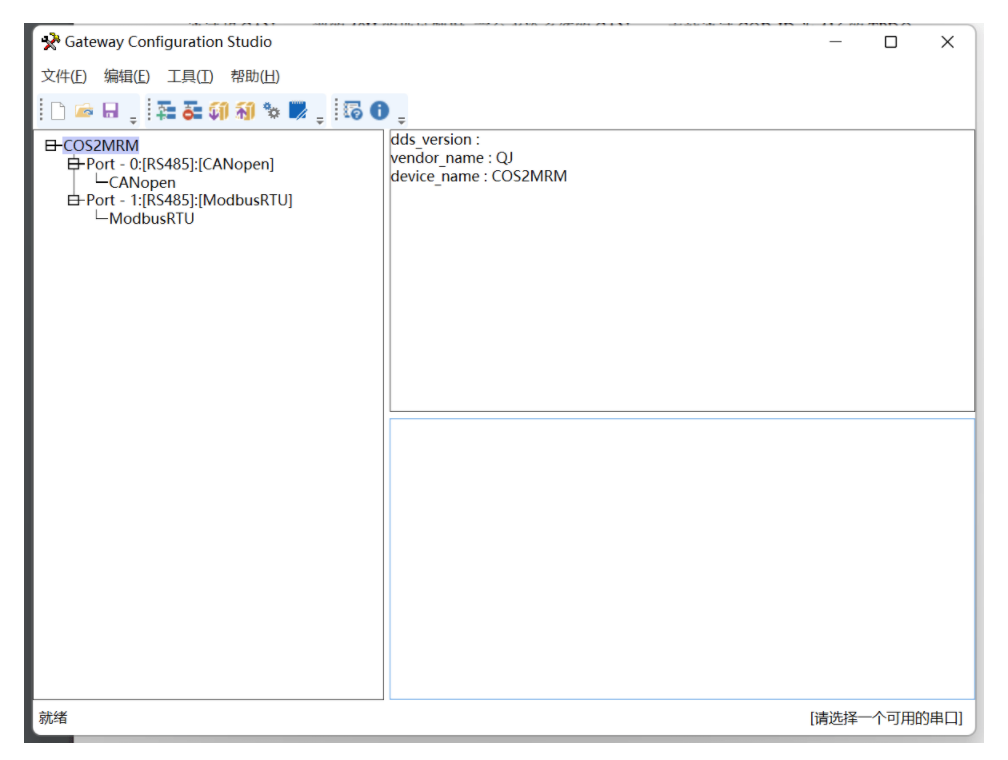
将网关eds文件导入到canopen主站之中,进行设置后打开网关配置软件
Gateway Configuration Studio
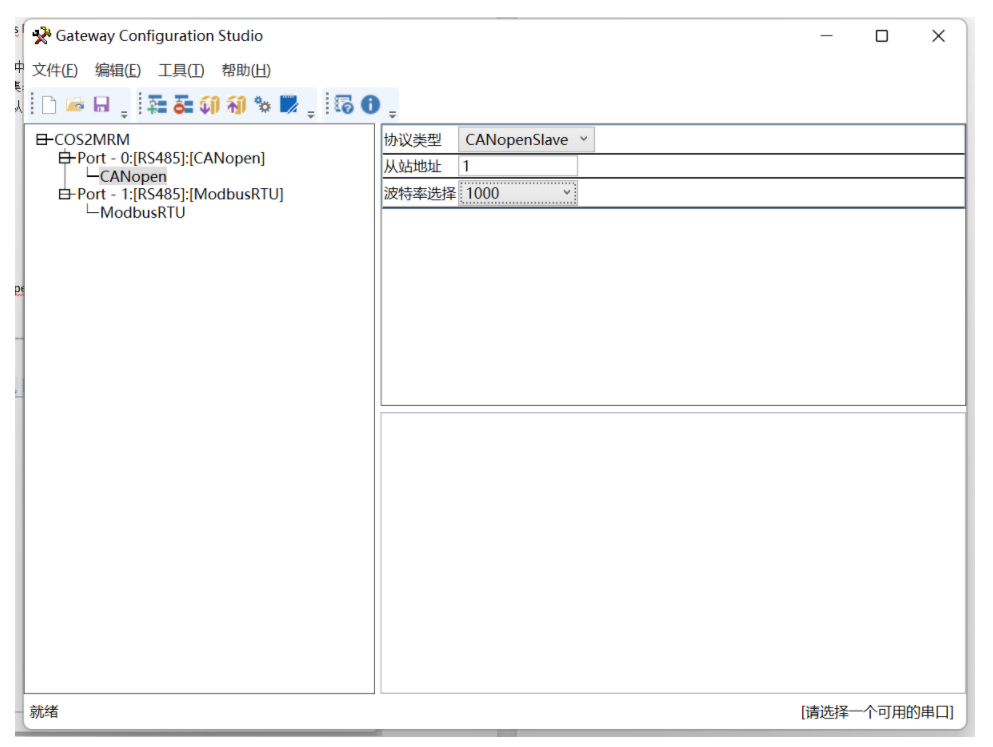
设置网关在canopen一侧的从站站号以及波特率,与主站设置保持一致即可。
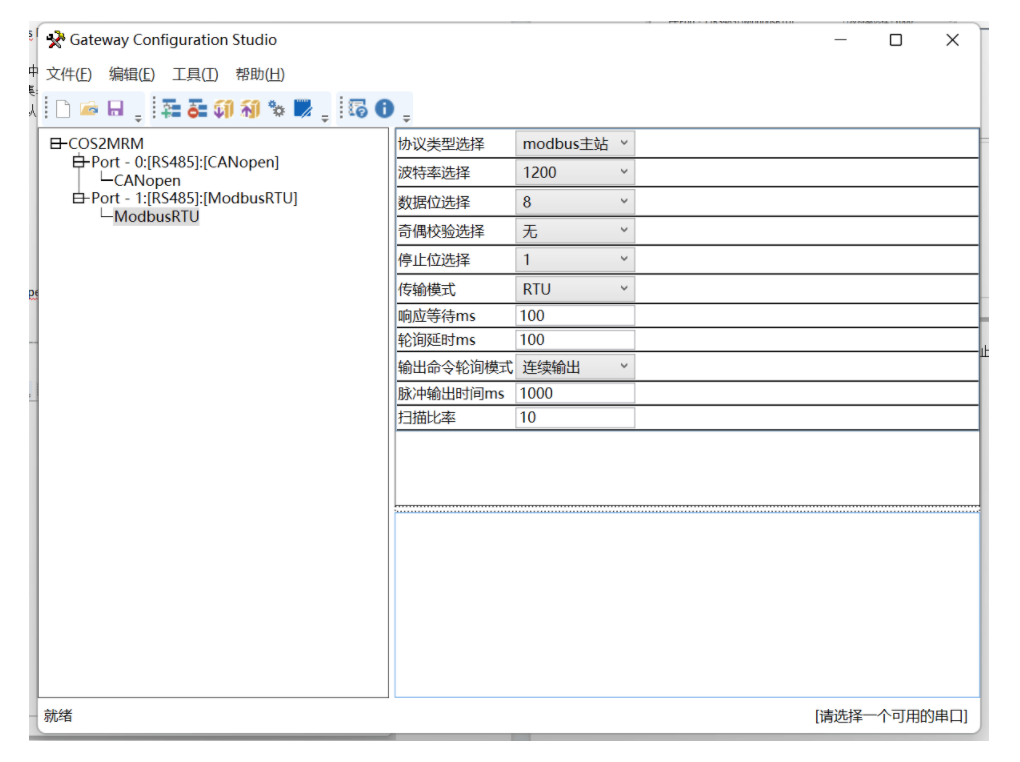
设置网关在modbus一侧的485参数(波特率,数据位停止位校验位等)
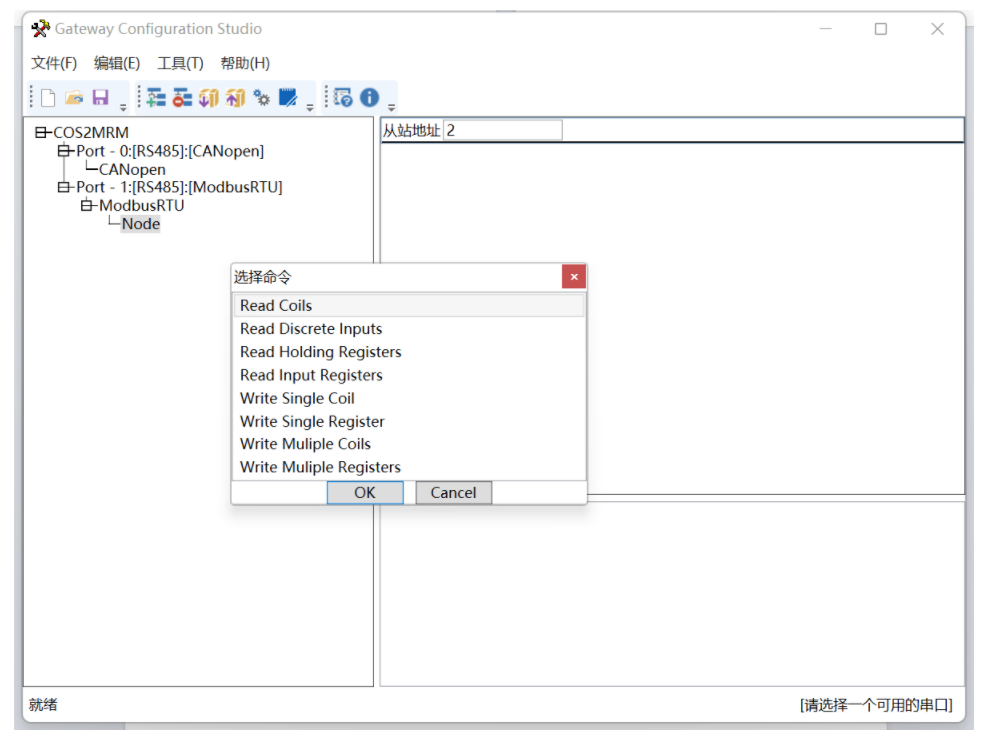
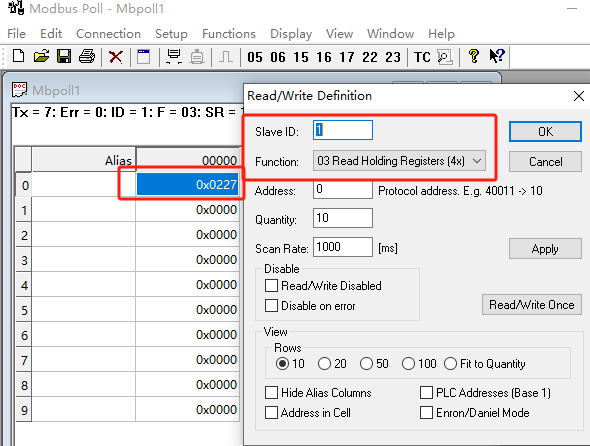
设置modbus从站的功能码及所需要的寄存器地址,首先选择功能码
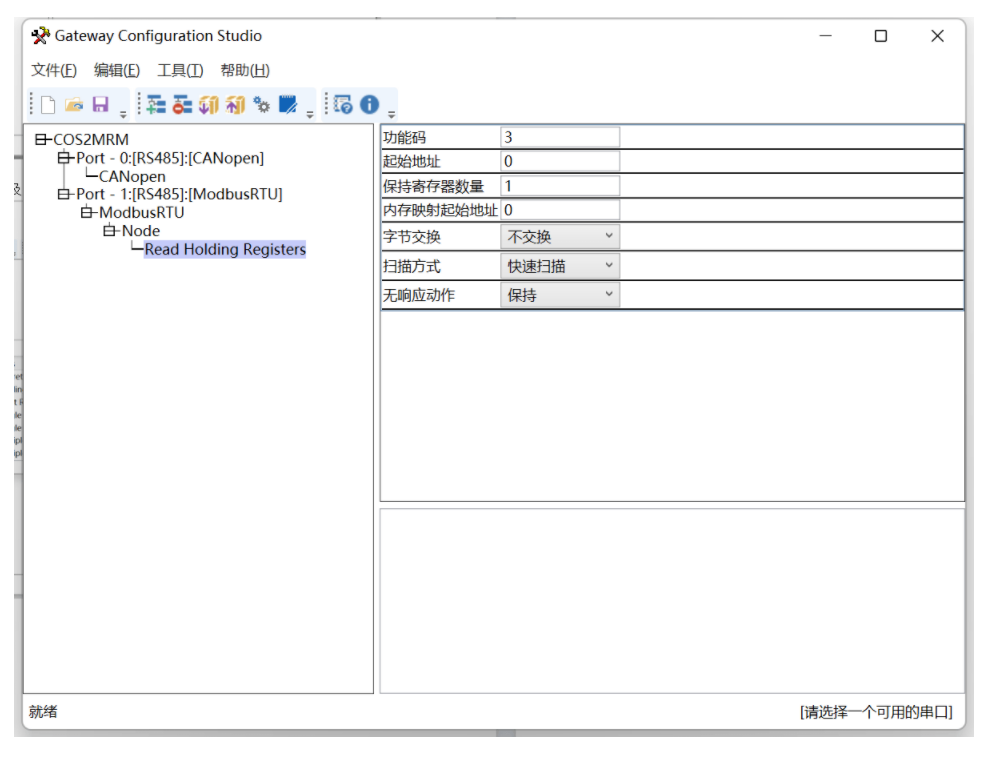
再填写用到的寄存器起始地址及寄存器数量
总结:
使用canopen(从)转modbus(主)网关可快速将canopen主站设备与modbus从站设备进行连接,并保持高速稳定的持续通信
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
MODBUS
+关注
关注
28文章
1799浏览量
76943 -
网关
+关注
关注
9文章
4443浏览量
51052 -
CANopen
+关注
关注
8文章
253浏览量
43580
发布评论请先 登录
相关推荐
Modbus转Ethernet网关在空调项目中的应用
Modbus转Ethernet网关在空调项目中的应用主要是实现Modbus协议的设备与Ethernet网络的连接和数据传输。这种
发表于 12-26 19:26
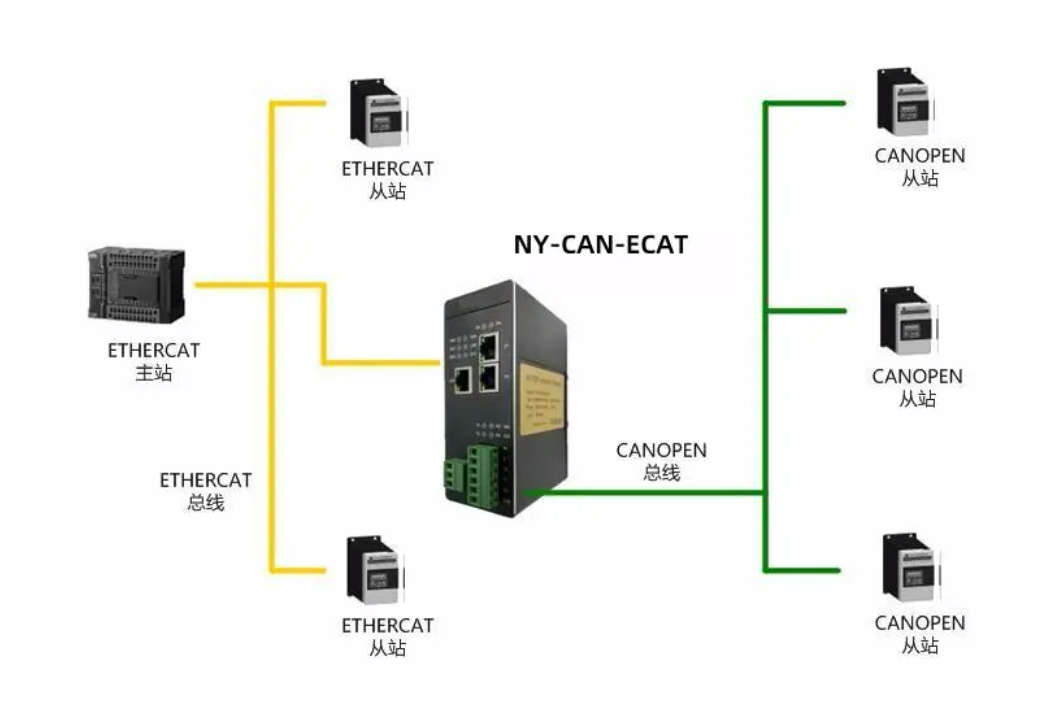
EtherCAT转CANopen网关在工业领域的应用方法
在工业领域中,EtherCAT转CANopen网关是一种重要的通讯设备,它能够实现EtherCAT协议与CANopen协议之间的转换,从而让
发表于 01-31 14:54
Modbus转profibus网关在化工项目中的应用简析
PROFIBUS-DP,所以就用到了主站网关YT-PB-01。主站网关在这里做MODBUS的从PROFIBUS-DP的主。 MODBUS转P
发表于 12-02 17:05
•533次阅读

耐用通信Ethercat转canopen网关在钢铁行业的应用案例
河北某钢厂的 PLC 控制系统改造项目。在该系统中,客户的国产plc作为Ethercat主站,用户的伺服是采用canopen通信的设备,耐用通信Ethercat
ModbusTCP转CANopen网关在楼宇消防中的应用
和扩展需求。Modbus TCP转CANopen网关在楼宇消防系统中发挥了重要作用,提高了系统的可靠性和安全性。同时,其灵活配置、高可靠性和良好的扩展性也使其成为楼

Modbus转Ethernet网关在空调项目中的应用
Modbus转Ethernet网关在空调项目中的应用主要是实现Modbus协议的设备与Ethernet网络的连接和数据传输。这种
Modbus转Ethernet网关在空调项目中的应用
Modbus转Ethernet网关在空调项目中的应用主要是实现Modbus协议的设备与Ethernet网络的连接和数据传输。这种

通过CANopen转Modbus TCP网关的伺服系统
通过CANopen转Modbus TCP网关,我们能够实现CANopen协议与Modbus TC
通过CANopen转Modbus TCP网关的伺服系统
通过CANopen转Modbus TCP网关,我们能够实现CANopen协议与Modbus TC
三格电子-MODBUS TCP转CANOpen网关
Modbus TCP转CANopen网关 型号:SG-TCP-COE-210 产品用途 本网关可以实现将





 工商网监
工商网监
评论