 MH481线性霍尔传感器的伺服电机系统设计
MH481线性霍尔传感器的伺服电机系统设计
前言
由于安装在永磁同步电机定子上的线性霍尔传感器的输出vwin 信号与转子气隙磁场强度成比例,与反电动势同相位,通过使用线性霍尔传感器代替光电编码器和开关尔传感器可得到转子的位置和速度信息;在此基础上,给出一种不需要在静止坐标系和转坐标系之间相互变换,可以在静止坐标系中直接产生相电流命令的场定向控制算法。
一、设计思路
在现有基于开关霍尔传感器和增量式光电编码器的永磁同步电机交流伺服系统中,开关霍尔传感器主要用来确定电机起动时转子的位置(精度为60°电角度)以便制器可以将电流输入适当定子绕组,实现电机起动,同时,在电机运行过程中用于提供电流换向信号。光电编码器要用于电机运行时转子位置检测,并实现转子速度计算。由于转子位置信息是磁场定向控制方法中进行坐标变换、度控制、位置控制等运算时必需的输入信息,其采样精度对制效果具有重要影响。
为了降低系统成本且保证控制性能,本文提出的新型交流伺服系统使用价格低廉的线性霍尔传感器代替增量式光电编码器和开关霍尔传感器利用霍尔传感器能够敏感磁场强度变化的特点通过对线性霍尔传感器输出信号进行检测,实现电机起动、电流换向、转子位置和信息反馈。
1.算法描述
以单极对永磁同步电机为例,将 3个线性尔传感器以彼此相差120°电角度的方式安装在定子上。由于永磁同步电机气隙磁场波形是正弦波当线性霍尔传感器处于正弦波气隙磁场中时,其输出电压信号uh1、uh2、uh3与气隙磁场分布的波形相同,且幅值固定,即:
uh1=Ksinθ
uh1=Ksin(θ-120°)
uh1=Ksin(θ+120°)
(式1)
式中,K =KhIhBm,为气隙磁场基波霍尔电势幅值;Kh为霍尔传感器的霍尔电势系数,单位为 V/(A*T);Ih为霍尔传感器的励磁电流,单位为 A;Bm为被敏感气隙磁场的磁感应强度峰值,单位为T;θ=ωt,为转子角速度,单位为rad/s。
由(式1)可知,转子位置的任何变化都会使线性霍尔传感器输出信号改变,因此,可以从线性霍尔传感器输出信号中获得转子位置、转速等信息。具体实现思路如图所示
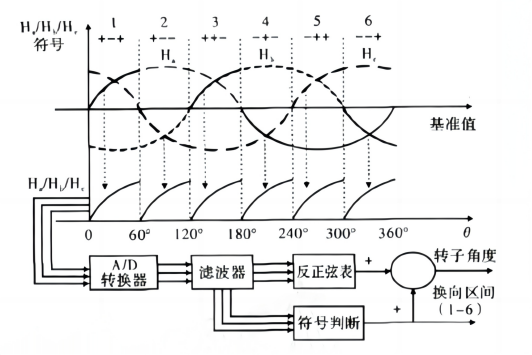
由图可知,首先, 360°电气角根据正负取值分为编号为1~6的6个区间每个区间为60°同时,建立一个0°~60的反正弦表格,表格精度为:
r= int(2An-1×sin60°)(式2)
其中, int()表示对括号中的数值进行取整运算:An表示所使用模拟数字转换器的精度。
将线性霍尔传感器输出信号 Ha、Hb、Hc行模数转换,判断转换结果与转换基准值之间的大小关系,如果转换结果大于基准值,则转换结果取正号,否则取负号;根据转换结果的正负,对照图1,即可确定电机转子当前处于1~6哪个区间中;在电机起动时,该信息可用于确定转子初始位置,在电机运行中,该信息可用作电流换向信号,从而实现交流伺服系统中开关霍尔传感器能。
电机起动后,利用上述方法判断转子当前所处区间,在区间 1~6中,分别使用Ha、-Hc、Hb、-Ha、Hc、-Hb的模糊转换结果在反正弦表格中查表,利用(式3)即可得到以角度方式描述的转子位置,从而实现交流伺服系统中增量式光电编码器的功能。
θ=θx+(n-1)×60°(式3)
式中,θ为转子位置;θx为查表结果;n为转子当前所处的区间
得到转子位置信息以后,计算转子角度增量对速度采样时间的微分,利用(式4)即可得到转子速度:
ω(k)
(式4)

式中,ω(k)为第k时刻的转子速度,单位rad/s;θ(K)为第k时刻的转子位置,单位为rad;ΔT为速度采样周期,单位为S,k表示速度采样时刻。
需要注意的是,当转子角度从0°变化到360°,或从360°变化到0°的时候,直接利用(式4)计算转速会导致速度计算误差。此时,可假设转子速度在一个速度采样周期内的变化忽略不计,当检测到转子角度增量太大时,用前一个采样周期的角度增量代替,这样,即可避免较大的速度估算误差。
在上述转子位置、速度检测方法中,由于使用线性霍尔传感器MH481代替了光电编码器和开关霍尔传感器,因此,大大降低了电机成本,减少了安装工序和外围器件;另外,由(式2)(式3)可知,只要模数转换器和反正弦表格的精度够高,就可以保证转子位置、速度反馈信息的高精度。
二、产品应用

总结
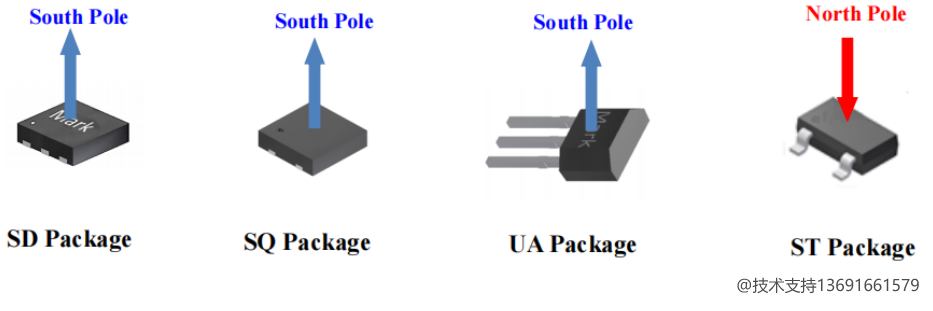
线性霍尔传感器MH481有TO-92S、TSOT-23、QFN2020-3、QFN2020-6四种封装形式,能适应所有的检测位置。
-
霍尔
+关注
关注
1文章
97浏览量
31112 -
霍尔传感器
+关注
关注
27文章
723浏览量
63167 -
微型电机
+关注
关注
2文章
93浏览量
23565 -
直流伺服电机
+关注
关注
4文章
54浏览量
10607
发布评论请先 登录
相关推荐

开关磁阻电机中的霍尔传感器的作用
3D霍尔效应位置传感器的基本原理及其应用案例
磁轴键盘霍尔开关MST-MH481霍尔磁轴机械键盘

电动牙刷电机专用霍尔元件方案-MH49A3线性传感器

FD1157H-带有嵌入式霍尔传感器的智能电机驱动器 封装SIP-4L
MH481:磁轴键盘 高精度 线性霍尔传感器方案






 工商网监
工商网监
评论