 微美全息(NASDAQ:WIMI)开发基于神经网络的无人机控制系统引领技术革新
微美全息(NASDAQ:WIMI)开发基于神经网络的无人机控制系统引领技术革新
在现代科技快速发展的背景下,无人机技术逐渐成为民用和商业领域中车载工具。然而,随着无人机应用领域的扩展,系统在执行任务时可能面临多变的气象条件、复杂的区域、以及各种不可替代的环境预知的环境因素。这使得无人机系统需要更加智能和监控的控制系统。传统的线性控制系统在处理非线性和复杂动态系统时存在着短板,无人机系统的飞行动力学通常是非线性的,因此需要一种能够有效处理此类动态系统的先进控制方法。此外,无人机系统面临的挑战也随之增加,这些挑战包括不断变化的环境、未知噪声、系统不确定性和复杂的动态问题,这些因素的存在增加了系统的不确定性,需要一个能够实时适应和调整的控制系统。据悉,微美全息(NASDAQ:WIMI)一直在此背景下希望开发一种创新的智能控制系统,以解决这些不确定性的问题提高无人机的控制准确性。
随着无人机技术的逐渐成熟,市场对于更加智能、更加激烈的系统需求迫切增长。人工神经网络作为一种先进的非线性建模和控制方法,在处理复杂、非线性系统方面表现出色。WIMI微美全息意识针对这一发展趋势,将人工神经网络引入无人机控制系统,以提高系统的性能和配件。
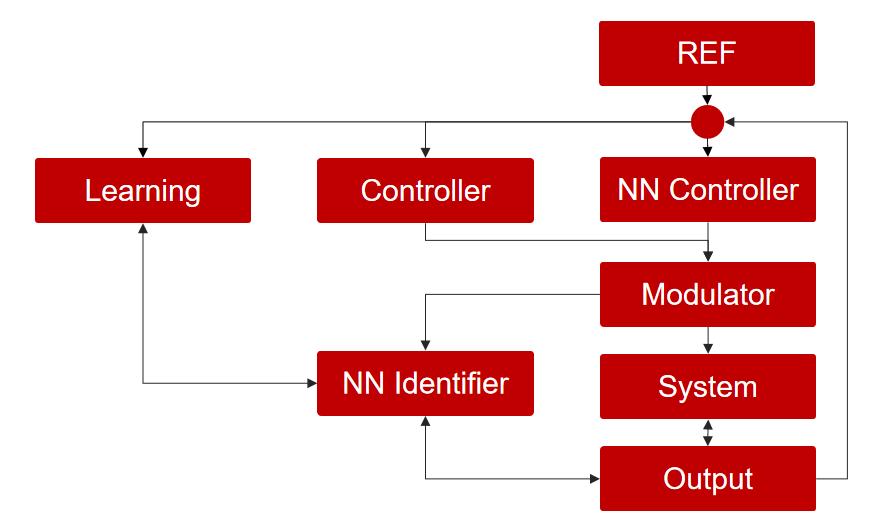
首先,为了实现对无人机系统中未知动态和不确定性的实时识别,WIMI微美全息开发了一种基于神经网络的标识符。该标识符的任务是通过监测系统输入和输出之间的关系,动态识别地捕捉和学习系统的未知特性。使用适当的神经网络结构,例如循环神经网络(RNN)或长短时记忆网络(LSTM),能够建立一个能够持续迭代和更新的标识符,从而提高对系统动态的逼近精度。再通过将标识符捕获到的信息与已知的系统动态相结合,生成了一个基于神经网络的系统模型。这个模型可以是线性的或非线性的,取决于具体系统的性质。 ,结合线性或非线性控制器,生成了基于神经网络的控制器。这个控制器的设计考虑了系统模型的动态变化,以实现对系统的实时调整,从而保持其在不确定环境下的稳定性性和性能。
此外,WIMI微美全息为了确保在线训练阶段系统的稳定性,引入了线性或非线性控制器。这些控制器在学习过程中充当保护层,防止系统因为未知的动态变化而导致不稳定行为的。在在线训练过程中中,通过将这些稳定性控制器与基于神经网络的控制器良好地工作,能够在学习的同时保持系统的安全运行,从而最大程度地减少不确定性对系统性能的影响。
为了评估所提出的智能控制系统的性能,WIMI微美全息进行了大量的计算机仿真实验。以系统不确定性和干扰动的基准无人机为对象,对系统的稳定性和控制性能进行了全面的评估通过vwin 飞行不同的环境和任务场景,验证了该系统在高效复杂环境、噪声和干扰时的鲁棒性和鲁棒性。
WIMI微美全息基于人工神经网络的无人机智能控制系统代表了在无人机技术领域的一次巨大飞跃。首先,通过引入基于神经网络的强制标识符,系统能够实时识别和近无人机系统中的未知特性,为后续控制器的设计提供了精准的基础。
这一创新技术的开发,为无人机系统的应用领域带来了新的前景。通过大量的计算机仿真验证,该系统在复杂环境、噪声和干扰下表现出色,成功实现了无人机的应用稳定飞行和控制。这不仅使无人机在民用和商业领域的高效应用可靠,同时也为未来的科技发展奠定了坚实的基础。WIMI微美全息的技术突破不仅使无人机系统在复杂环境下的适应能力,也为科技领域带来了启示,将在未来的智能系统发展中发挥关键作用。
显然,这项技术不仅仅是针对无人机技术的重要贡献,更是对整个人工智能与航空领域深度融合的滤波器。未来,这一技术将推动无人机技术的不断发展和智能系统的推进开拓新的道路,WIMI微美全息将继续致力于推动科技的不断进步,为构建更加智能和可靠的未来做出更大的贡献。
审核编辑 黄宇
-
控制系统
+关注
关注
41文章
6604浏览量
110574 -
神经网络
+关注
关注
42文章
4771浏览量
100708 -
无人机
+关注
关注
229文章
10420浏览量
180098
发布评论请先 登录
相关推荐
无人机AI智慧光伏巡检系统的技术实现与运维革新
人机协同新纪元:微美全息引领混合增强智能技术革新
特信无人机反制 守护空域安全:无人机干扰设备的技术革新与挑战
基于神经网络的全息图生成算法
电机控制系统的神经网络优化策略
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
知语云智能科技:反制无人机新篇章—全景监测与激光打击的尖端技术
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
\"【重磅推出】知语云智能科技:革新低空无人机反制系统,守护领空安全!
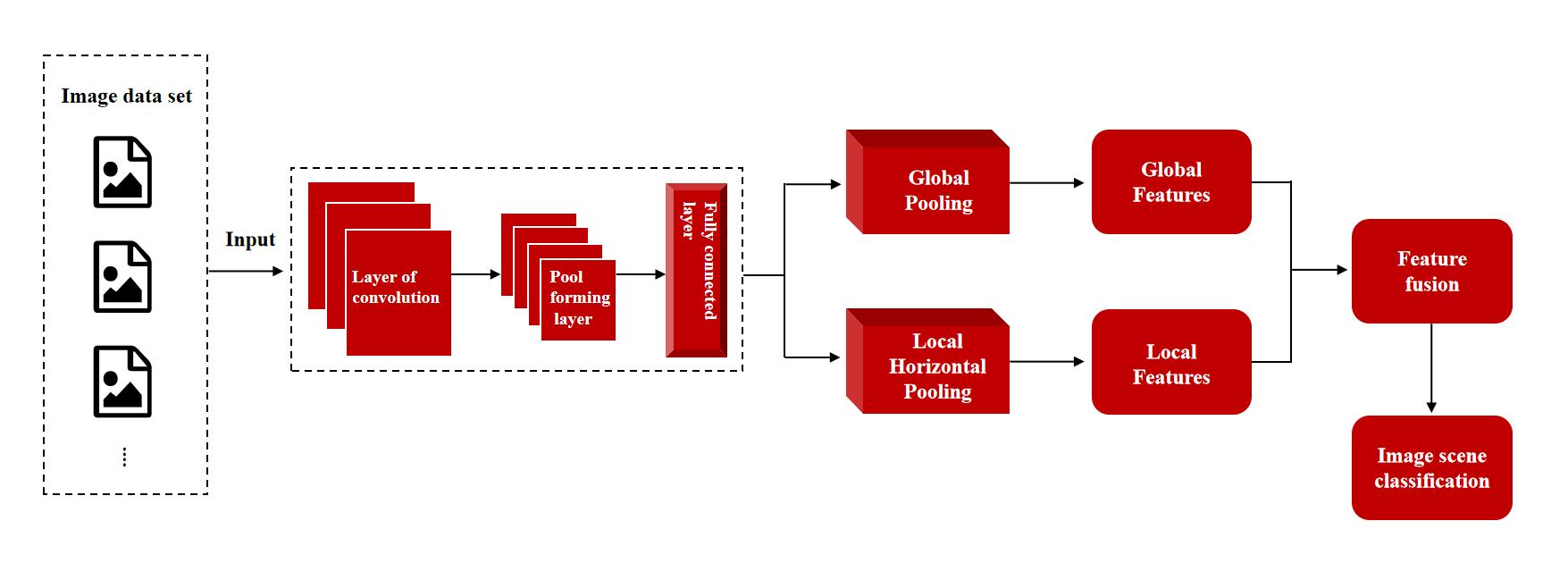
微美全息(NASDAQ:WIMI)探索全局-局部特征自适应融合网络框架在图像场景分类中的创新运用





 工商网监
工商网监
评论