 RL究竟是如何与LLM做结合的?
RL究竟是如何与LLM做结合的?
RLHF 想必今天大家都不陌生,但在 ChatGPT 问世之前,将 RL 和 LM 结合起来的任务非常少见。这就导致此前大多做 RL 的同学不熟悉 Language Model(GPT)的概念,而做 NLP 的同学又不太了解 RL 是如何优化的。在这篇文章中,我们将简单介绍 LM 和 RL 中的一些概念,并分析 RL 中的「序列决策」是如何作用到 LM 中的「句子生成」任务中的,希望可以帮助只熟悉 NLP 或只熟悉 RL 的同学更快理解 RLHF 的概念。
1. RL: Policy-Based & Value Based
强化学习(Reinforcement Learning, RL)的核心概念可简单概括为:一个机器人(Agent)在看到了一些信息(Observation)后,自己做出一个决策(Action),随即根据采取决策后得到的反馈(Reward)来进行自我学习(Learning)的过程。
光看概念或许有些抽象,我们举个例子:现在有一个机器人找钻石的游戏,机器人每次可以选择走到相邻的格子,如果碰到火焰会被烧死,如果碰到钻石则通关。
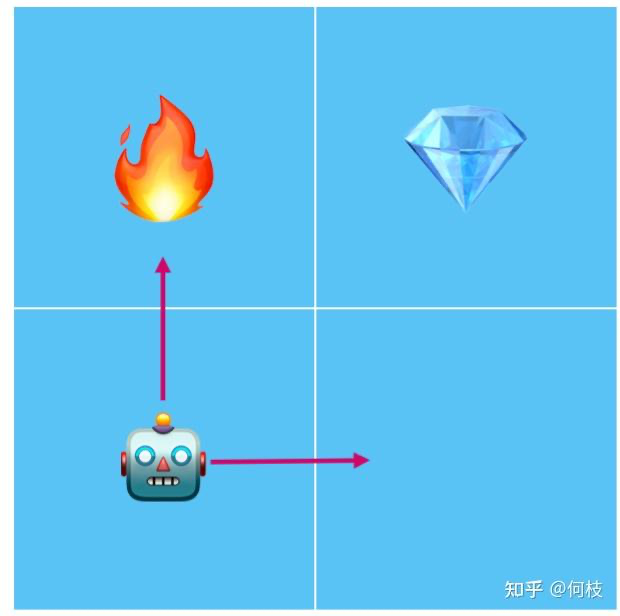
机器人找钻石的例子:碰到火焰则会被烧死
在这个游戏中,机器人(Agent)会根据当前自己的所在位置(Observation),做出一次行为选择(Action):
如果它此时选择「往上走」,则会碰到火焰,此时会得到一个来自游戏的负反馈(Reward),于是机器人会根据当前的反馈进行学习(Learning),总结出「在当前的位置」「往上走」是一次错误的决策。
如果它此时选择「向右走」,则不会碰到火焰,并且因为离钻石目标更近了一步,此时会得到一个来自游戏的正反馈(Reward),于是机器人会根据当前的反馈进行学习(Learning),总结出「在当前位置」「往右走」是一次相对安全的决策。
通过这个例子我们可以看出,RL 的最终目标其实就是要让机器人(Agent)学会:在一个给定「状态」下,选择哪一个「行为」是最优的。
一种很直觉的思路就是:我们让机器人不断的去玩游戏,当它每次选择一个行为后,如果这个行为得到了「正奖励」,那么下次就多选择这个行为;如果选择行为得到了「负惩罚」,那么下次就少选择这个行为。
为了实现「多选择得分高的行为,少选择得分低的行为」,早期存在 2 种不同的流派:Policy Based 和 Value Based。
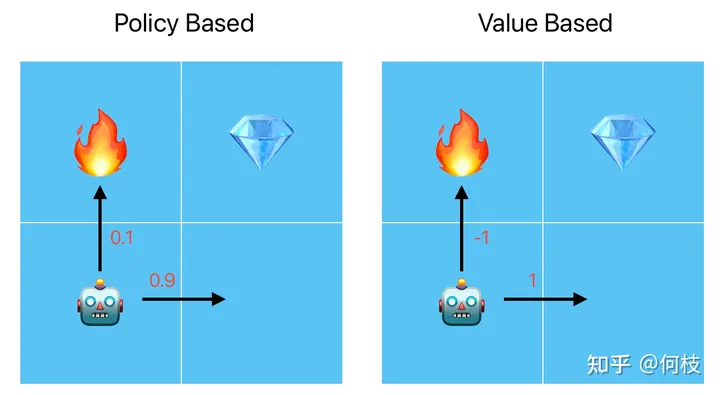
Policy Based 将行为量化为概率;Value Based 将行为量化为值
其实简单来说,这 2 种流派的最大区别就是在于将行为量化为「概率」还是「值」,具体来讲:
Policy Based:将每一个行为量化为「概率分布」,在训练的时候,好行为的概率值将被不断提高(向右走,0.9),差行为的概率将被不断降低(向上走,0.1)。当机器人在进行行为选择的时候,就会按照当前的概率分布进行采样,这样就实现了「多选择得分高的行为,少选择得分低的行为」。
Value Based:将每一个行为量化为「值」,在训练的时候,好行为的行为值将被不断提高(向右走,1分),差行为的行为值将被不断降低(向上走,-1)。当机器人在进行行为选择的时候会选择「行为值最大的动作」,这样也实现了「多选择得分高的行为,少选择得分低的行为」。
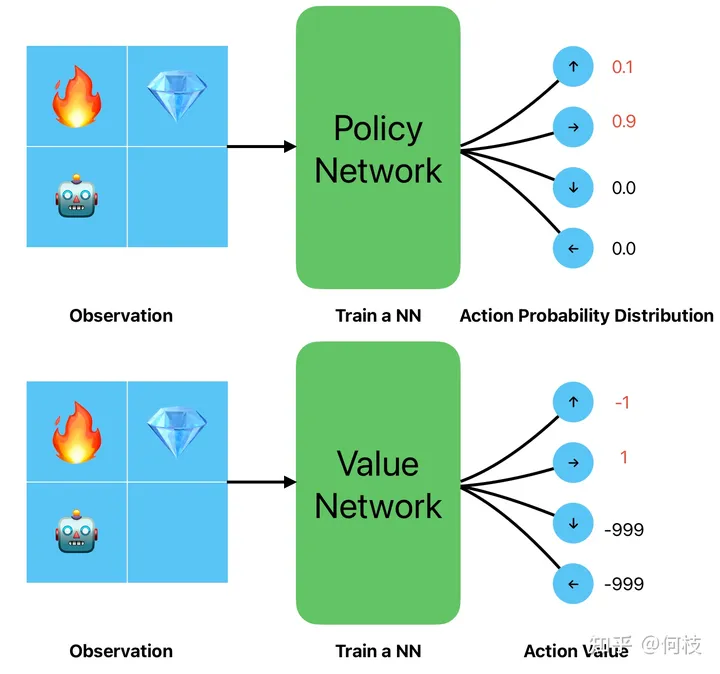
两种策略输入一样,只是输出的形式不一样(概率 v.s. 值)
关于这 2 种流派的更多训练细节在这里就不再展开,如果感兴趣可以看看比较出名的代表算法:[Policy Gradient](Policy Based)和 [Q-Learning](Value Based)。
讲到这里,我们可以思考一下,Language Model(GPT)是属于 Policy Based 还是 Value Based ?
为了弄明白这个问题,我们下面一起看看 GPT 是怎么工作的。
2. Language Model(GPT)是一种 Policy Based 还是一种 Value Based?
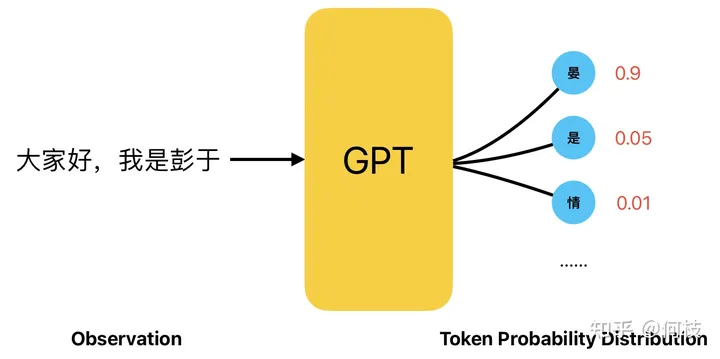
GPT 是一种 Next Token Prediction(NTP),即:给定一段话的前提下,预测这段话的下一个字是什么。
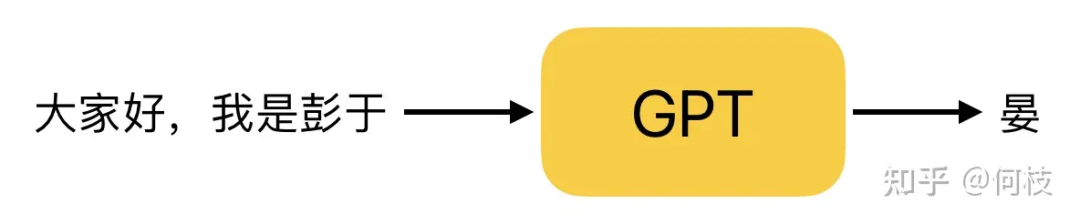
GPT 工作原理(Next Token Prediction,NTP)
而 GPT 在进行「下一个字预测」的时候,会计算出所有汉字可能出现的概率,并根据这个概率进行采样。
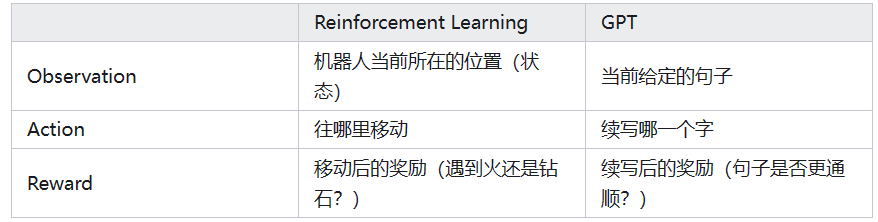
在这种情况下,我们完全可以将「给定的一段话」看成是我们上一章提到的 Observation,
将「预测的下一个字」看成是上一章提到的 Action,而 GPT 就充当了其中 Agent 的角色:
GPT 生成文本的过程,一个典型的 Policy Based 过程
如此看来,Language Model 的采样过程其实和 Policy Based 的决策过程非常一致。
回顾一下我们之前提到过 RL 的目标:在一个给定「状态」下,选择哪一个「行为」是最优的,
迁移到 GPT 生成任务上就变成了:在一个给定的「句子」下,选择(续写)哪一个「字」是最优的。
因此,将 RL 中 Policy Based 的训练过程应用到训练 GPT 生成任务里,一切都显得非常的自然。
通过 RL 对 GPT 进行训练,我们期望 GPT 能够学会如何续写句子才能够得到更高的得分,
但,现在的问题是:游戏中机器人每走一步可以通过游戏分数来得到 reward,GPT 生成了一个字后谁来给它 reward 呢?
3. 序列决策(Sequence Decision)以及单步奖励(Step Reward)的计算
在第一章和第二章中,我们其实讨论的都是「单步决策」:机器人只做一次决策,GPT 也只生成一个字。
但事实上,机器人想要拿到钻石,通常需要做出 N 次行为选择。
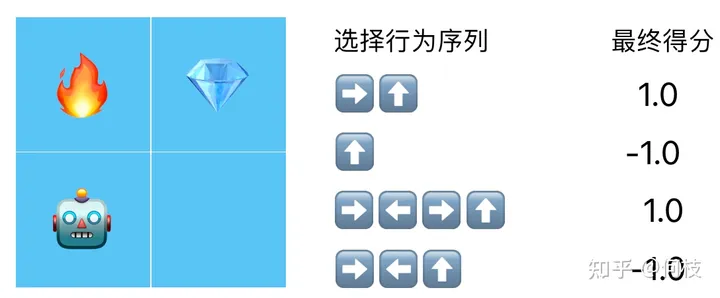
不同的行为选择序列得到的得分:假设拿到 得1分,碰到 得-1分,其余情况不加分也不扣分
在这种情况下我们最终只有 1 个得分和 N 个行为,但是最终 RL 更新需要每个行为都要有对应的分数,
我们该如何把这 1 个总得分对应的分配给所有的行为呢?
答案是计算「折扣奖励(discount reward)」。
我们认为,越靠近最末端的行为对得分的影响越大,于是从后往前,每往前行为就乘以 1 次折扣因子 γ:
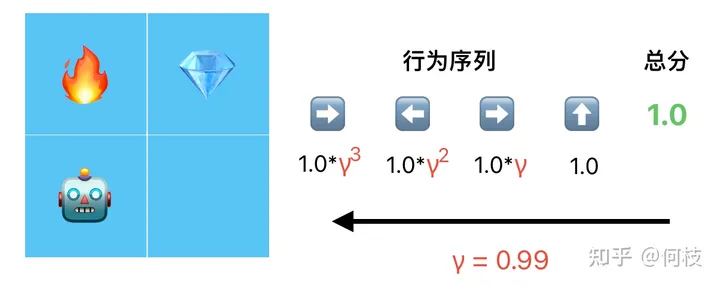
根据最终得分(total reward),从后往前倒推出每一个行为的得分(step reward)
同样,GPT 在生成一个完整句子的过程中,也会做出 N 个行为(续写 N 个字),
而我们在评分的时候,只会针对最后生成的完整句子进行一个打分(而不是生成一个字打一个分),
最后,利用上述方法通过完整句子的得分倒推出每个字的对应得分:
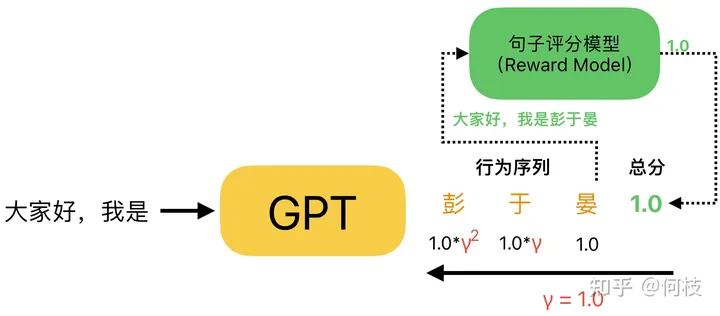
注意:在 GPT 的得分计算中,通常折扣因子(γ)取 1.0
值得注意的是:通常在对 GPT 生成句子进行得分拆解的时候,折扣因子(γ)会取 1.0,
这意味着,在句子生成任务中,每一个字的生成都会同等重要地影响着最后生成句子的好坏。
我们可以这么理解:在找钻石的游戏中,机器人采取了一些「不当」的行为后是可以通过后续行为来做修正,比如机器人一开始向右走(正确行为),再向左走(不当行为),再向右走(修正行为),再向上走(正确行为),这个序列中通过「修正行为」能够修正「不当行为」带来的影响;但在句子生成任务中,一旦前面生成了一个「错别字」,后面无论怎么生成什么样的字都很难「修正」这个错别字带来的影响,因此在文本生成的任务中,每一个行为都会「同等重要」地影响最后句子质量的好坏。
4. 加入概率差异(KL Penalty)以稳定 RL 训练
除了折扣奖励,在 OpenAI 的 [Learning to summarize from human feedback] 这篇工作中指出,
在最终生成句子的得分基础上,我们还可以在每生成一个字时候,计算 RL 模型和 SFT 模型在生成当前字的「概率差异」,并以此当作生成当前字的一个 step reward:

通过概率差异(KL)作为 reward 有 2 个好处:1. 避免模型崩溃到重复输出相同的一个字(模式崩溃)。2. 限制 RL 不要探索的离一开始的模型(SFT)太远
通常在进行 RL 训练时,初始都会使用 SFT 模型做初始化,随即开始探索并学习。
由于 RL 的训练本质就是:探索 + 试错,
加上「概率差异」这一限制条件,就相当于限制了 RL 仅在初始模型(SFT)的附近进行探索,
这就大大缩小了 RL 的探索空间:既避免了探索到那些非常差的空间,又缓解了 Reward Model 可能很快被 Hacking 的问题。
我们举一个具体的例子:
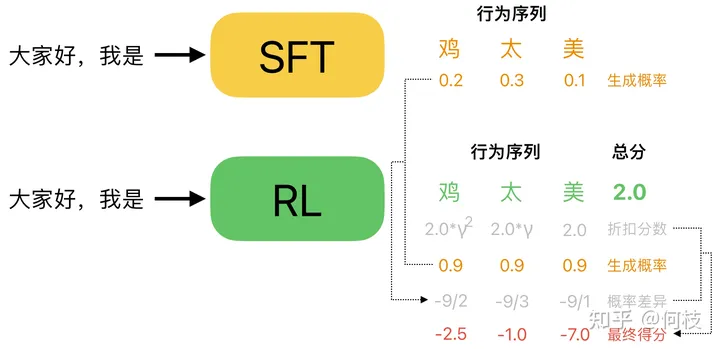
加上 KL 惩罚(概率差异)约束后的 step reward
如上图所示,对于「大家好,我是」这个 prompt,Policy(RL)Model 认为「鸡太美」是一个很好的答案,
这可能是 Reward Model 打分不准导致的(这很常见),上图中 RM 给「鸡太美」打出了 2 分的高分(绿色)。
但是,这样一个不通顺的句子在原始的模型(SFT Model)中被生成出来的概率往往是很低的,
因此,我们可以计算一下「鸡太美」这 3 个字分别在 RL Model 和在 SFT Model 中被采样出来的概率,
并将这个「概率差异」加到 RM 给出的「折扣分数」中,
我们可以看到:尽管对于这个不通顺的句子 RM 给了一个很高的分数,但是通过「概率差异」的修正,每个字的 reward 依然被扣除了很大的惩罚值,从而避免了这种「RM 认为分数很高,但实则并不通顺句子」被生成出来的情况。
通过加入「概率差异」的限制,我们可以使得 RL 在 LM 的训练中更加稳定,防止进化为生成某种奇怪的句子,但又能「哄骗」Reward Model 给出很高分出的情况(RL 非常擅长这一点)。
但,如果你的 RM 足够的强大,永远无法被 Policy 给 Hack,或许你可以完全放开概率限制并让其自由探索。
-
机器人
+关注
关注
211文章
28379浏览量
206904 -
强化学习
+关注
关注
4文章
266浏览量
11245 -
LLM
+关注
关注
0文章
286浏览量
327
原文标题:RL 究竟是如何与 LLM 做结合的?
文章出处:【微信号:zenRRan,微信公众号:深度学习自然语言处理】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
嵌入式和人工智能究竟是什么关系?
PCM1861 INT脚究竟是输出还是输入?
超高频读写器究竟是什么,能做什么?一文读懂!


请问cH340G的TX引脚电平究竟是3v还是5v?
MPLS究竟是什么?

工业物联网究竟是什么呢?它又有哪些作用呢?
STM32擦除后数据究竟是0x00还是0xff ?
MOSFET的栅源振荡究竟是怎么来的?栅源振荡的危害什么?如何抑制
吸尘器究竟是如何替你“吃灰”的【其利天下技术】





 工商网监
工商网监
评论