 在自动化码头中CANopen与Ethercat协议的应用
在自动化码头中CANopen与Ethercat协议的应用
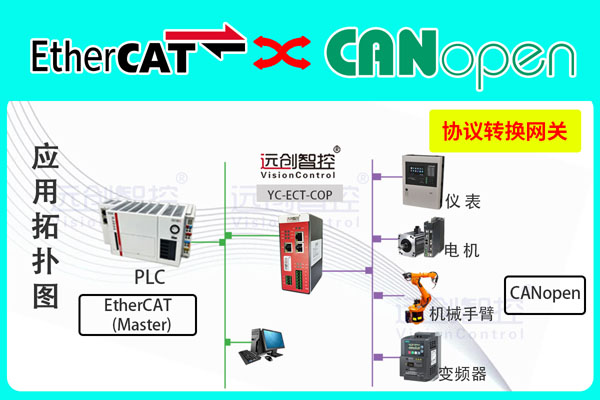
在自动化码头中,协议转换是一个关键环节,它能够实现不同设备之间的数据交互和协同工作。其中,将CANopen协议转换为EtherCAT协议的应用尤为常见。我们来了解一下CANopen和EtherCAT这两种协议。CANopen是一种基于CAN总线的通讯协议,被广泛应用于工业自动化领域,尤其是在运动控制和传感器通信方面。而EtherCAT是一种实时以太网通讯协议,具有高速、高可靠性和高扩展性的特点,被广泛应用于现代工业自动化系统的主从站通讯。
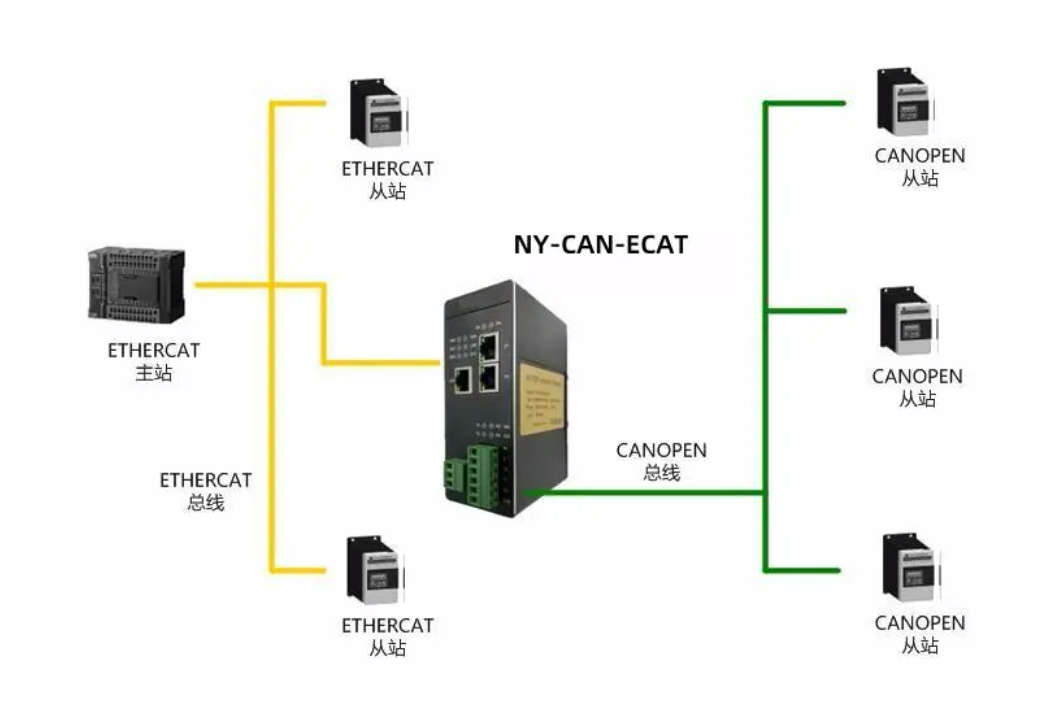
在自动化码头中,各种设备如起重机、输送带、堆垛机等需要通过统一的通讯协议进行协同工作。然而,由于这些设备的控制器可能采用不同的通讯协议,因此需要进行协议转换。将CANopen转换为EtherCAT可以使得采用CANopen协议的设备能够与采用EtherCAT协议的设备进行无缝连接,从而实现整个码头的协同工作。
具体来说,这种转换可以通过专用的转换器或网关来实现。转换器或网关需要具备CANopen和EtherCAT两种协议的处理能力,能够将接收到的CANopen数据转换为EtherCAT数据,或者将EtherCAT数据转换为CANopen数据。通过这种方式,可以实现不同设备之间的数据交互和协同工作,提高自动化码头的整体效率和可靠性。
需要注意的是,在实际应用中还需要考虑协议转换的性能和实时性。由于自动化码头的设备数量较多,且需要进行高速、实时的数据传输,因此需要保证转换器的处理能力和实时性能够满足实际需求。同时,还需要考虑转换器的可扩展性和稳定性,以满足未来自动化码头的发展需求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动化
+关注
关注
29文章
5562浏览量
79239 -
CANopen
+关注
关注
8文章
253浏览量
43580 -
ethercat
+关注
关注
18文章
686浏览量
38670
发布评论请先 登录
相关推荐
CANopen主站转EtherCAT协议网关(EtherCAT转CANopen)
CANopen转EtherCAT 如何实现高效且稳定的连接与通信,这个问题常常令许多人士深感困惑。在此,作者为大家深入解读这一难题。 远创智控YC-ECT-COP 型设备可以很好地解决这一协议转换
EtherCAT从站转CANopen主站协议网关(JM-ECT-COP)
到EtherCAT网络。 应用广泛:应用于支持CANopen接口的变频器、步进电机、伺服驱动器、仪表、PLC、DCS、FCS等等。在机器人的生产和应用中,多个部件和子系统可能使用不同的通信协议
关于巴图自动化PN转Modbus协议网关模块怎么配置IP地址教学
Profinet协议和Modbus协议是工业通讯常用协议,通过巴图自动化PN转Modbus网关模块(BT-MDPN10)实现连接。常见的协议

巴图自动化PN转Modbus RTU协议转换网关模块快速配置
:Profinet协议,Modbus协议,ModbusTCP协议,Profibus协议,Profibus DP协议,

电机控制领域如何实现CANopen设备接入EtherCAT主站控制器
通讯技术,在电机控制领域具有广泛的应用,典型的主站产品中PLC、运动控制器等产品都有大量EtherCAT通讯产品.此外CANopen是一种传统常见的工业自动化通讯

EtherCAT转CANopen网关在工业领域的应用方法
在工业领域中,EtherCAT转CANopen网关是一种重要的通讯设备,它能够实现EtherCAT协议与

EtherCAT转CANopen网关在工业领域的应用方法
在工业领域中,EtherCAT转CANopen网关是一种重要的通讯设备,它能够实现EtherCAT协议与
在自动化码头中CANopen与Ethercat协议的应用
在自动化码头中,协议转换是一个关键环节,它能够实现不同设备之间的数据交互和协同工作。其中,将CANopen
Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用
在自动化控制领域,Profinet和CanOpen都是广泛应用的通信协议。Profinet是一种基于以太网的通信协议,主要用于工业

Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用
在自动化控制领域,Profinet和CanOpen都是广泛应用的通信协议。Profinet是一种基于以太网的通信协议,主要用于工业
发表于 01-10 10:29
Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用
在自动化控制领域,Profinet和CanOpen都是广泛应用的通信协议。Profinet是一种基于以太网的通信协议,主要用于工业
Profinet协议转换为CanOpen协议来连接伺服驱动器的应用
在自动化控制领域,Profinet和CanOpen都是广泛应用的通信协议。Profinet是一种基于以太网的通信协议,主要用于工业
ModbusTCP转CANopen网关在楼宇消防中的应用
Modbus TCP转CANopen网关在楼宇消防中的应用主要是实现Modbus TCP协议的消防设备与CANopen协议的楼宇自动化系统之
发表于 12-25 16:29
耐用通信Ethercat转canopen网关在钢铁行业的应用案例
河北某钢厂的 PLC 控制系统改造项目。在该系统中,客户的国产plc作为Ethercat主站,用户的伺服是采用canopen通信的设备,耐用通信Ethercat转





 工商网监
工商网监
评论