 XKCON祥控斗轮堆取料机自动化控制系统
XKCON祥控斗轮堆取料机自动化控制系统
能够进行连续高效装卸输送的大型散料装卸设备悬臂式斗轮堆取料机的应用非常广泛,在港口、电厂、矿山等行业中均可见到它的身影。
但传统的斗轮堆取料机操作方式主要依靠司机人工操作,作业过程连续、劳动强度大,还存在登高的不利风险因素,缺乏设备的状态实时监测和料场的数字化管理,而导致生产效率低。
济南祥控自动化有限公司开发的XKCON祥控斗轮堆取料机自动化控制系统根据斗轮堆取料机的工作过程和主要工艺过程,基于三维激光扫描技术进行了全方位的自动控制设计。
三维激光扫描技术是一种通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据,大量的采集空间点位信息,快速建立物体的三维影像模型的技术,在XKCON斗轮堆取料机自动化控制系统中,通过安装三维激光扫描仪实时采集料堆的云点数据,构建料场三维模型,并结合斗轮堆取料机的空间信息,以及料场存量和进出料等信息数据,通过在中控系统输入相应的参数,可以控制斗轮堆取料机自动完成堆取料作业,从而实现轮堆取料机堆取作业的自动化,实现无人值守。
XKCON祥控斗轮堆取料机自动化控制系统采用先进的超声波传感技术,杜绝设备运行中出现碰撞的情况;采用高精度编码器实现堆取料机实时精准定位并将其转算为堆取料准确位置;应用编码器及RFID技术,通过以太网、光纤等有线通讯方式,或无线通讯方式实现中控远程控制,避免出现通讯故障,保证系统安全运行。
XKCON祥控斗轮堆取料机自动化控制系统从机构和结构两方面进行分析改造,经改造后斗轮机的吞吐能力得到了较大程度地提升,提高了生产效率,降低了能耗,在火电、港口、矿场等行业场所中均可应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6604浏览量
110574 -
自动化
+关注
关注
29文章
5562浏览量
79239
发布评论请先 登录
相关推荐
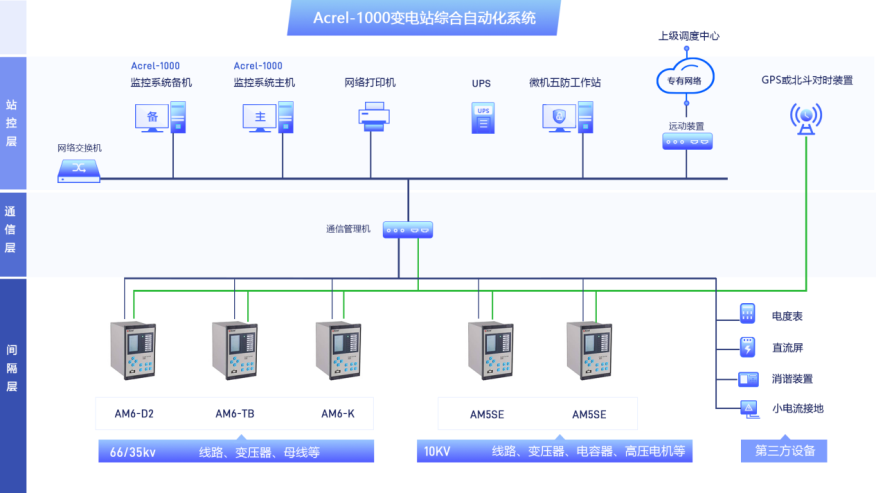
XKCON祥控变电站智能综合监控系统
济南祥控自动化设备有限公司设计的XKCON祥控变电站智能综合监控系统融合了视频和环境监控两大主要功能,将视频与环境数据(温湿度、六氟化硫、氧
工业自动化控制系统是由哪几个环节组成的?
工业自动化控制系统是指用一些自动控制装置,对生产中某些关键性参数进行自动控制,使它们在受到外界干扰(扰动) 的影响而偏离正常状态时,能够被
XKCON祥控原煤筒仓安全监测系统能够对煤温、甲烷、氧气、烟气、和料高进行检测和安全预警
XKCON祥控原煤筒仓安全监测系统由各种类型传感器、测量控制单元和数据处理中央控制室三部分构成,该系统
XKCON祥控变电站智能辅控系统包括环境监测、设备状态监测、电气设备控制、安防消防等子系统
随着社会经济的发展,工业、商业以及家庭的用电逐渐增加,为有效保障电力可靠供应,变电站的数量也就越来越多。 济南祥控自动化设备有限公司开发的XKCON祥控变电站智能辅控

工业自动化和控制系统网络安全的关系
一、工业自动化和控制系统概述 1.1 工业自动化的概念 工业自动化是指利用计算机、通信和控制技术,实现工业生产过程中的
工业自动化控制系统有哪些类型
工业自动化控制系统是现代工业生产中不可或缺的一部分,它通过各种传感器、执行器、控制器等设备,实现对生产过程的实时监控、自动控制和优化管理。随着科技的不断发展,工业
工业自动化控制系统装置有哪些
工业自动化控制系统装置是现代工业生产中不可或缺的一部分,它们能够提高生产效率、降低成本、提高产品质量和安全性。本文将详细介绍工业自动化控制系统装置的种类、功能、应用场景以及发展趋势。
工业自动化控制系统的核心组件不包括什么
工业自动化控制系统是现代工业生产中不可或缺的一部分,它通过计算机、传感器、执行器等设备实现对生产过程的自动控制和管理。在工业自动化控制系统中
工厂自动化控制系统中光纤的作用
在工厂自动化控制系统中,光纤通信技术发挥着重要作用。本文将详细介绍光纤在工厂自动化控制系统中的作用,包括光纤通信的基本原理、光纤在工厂自动化
水利闸门自动化控制系统简介及构成
成都国科自动化ZK4000系列闸门自动化控制系统,采用了计算机、光纤网络通讯和现场总线、现地控制单元、传感器、测控软件等多种现代化技术,可实

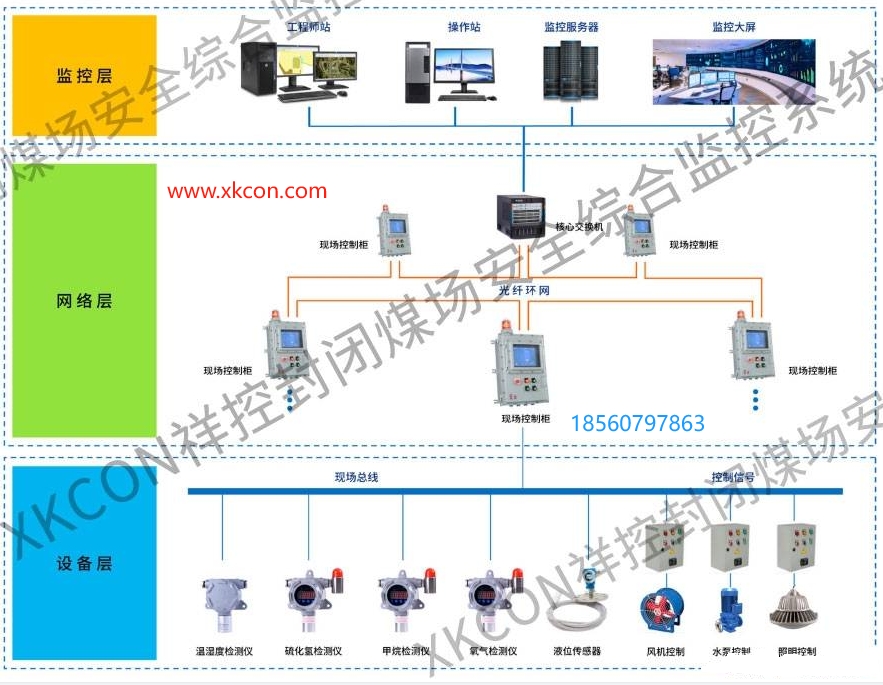
XKCON祥控煤场安全监控系统介绍
XKCON祥控煤场安全监控系统采用高可靠性的传感器和通信设备,确保数据的准确性和稳定性;通过实时监测、预警功能、自动化控制等手段,可以有效提





 工商网监
工商网监
评论