 航天传感器知识丨惯性敏感器的基本原理及其分类
航天传感器知识丨惯性敏感器的基本原理及其分类
惯性敏感器(Inertial Sensors)又称惯性器件或惯性仪表,主要是指各种陀螺仪和加速度计,分别用来测量载体的角运动和线运动。其中,陀螺仪测量角运动,加速度计测量线运动加速度。
“惯性”的含义为:陀螺仪和加速度计的基本工作原理是动量矩定理和牛顿第二定律,即惯性原理;陀螺仪和加速度计的输出是相对惯性空间的测量值。惯性导航系统的精度在很大程度上取决于陀螺仪和加速度计的精度。
陀螺仪
陀螺仪是敏感角运动的一种测量装置。这种仪表常用来测量运载体的角位移或角速率。陀螺仪不仅是运载体航行驾驶的重要仪表,而且是运载体控制系统、惯性导航系统和惯性制导系统的核心元件。
当陀螺仪在平台式惯导系统中应用时,陀螺仪安装在平台上,用来敏感平台的角偏移。当陀螺仪在捷联式惯导系统中应用时,陀螺仪直接与运载体固连,用来敏感运载体的角速率或角位移。
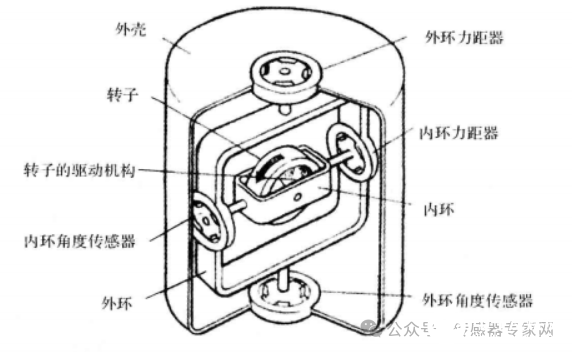
最早问世的陀螺仪是由高速旋转的刚体转子支撑在框架上而构成的,后来又研制出多种采用特殊支撑方法的无框架的刚体转子陀螺仪。因此,传统上把陀螺仪定义为利用动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或两个轴的角运动的装置。
随着科学技术的发展,还相继发现数十种物理现象并研制出可以被用来感测载体相对惯性空间的角运动的测量装置,人们亦把陀螺仪这一名称扩展到这些没有刚体转子而功能与经典陀螺仪等同的敏感器上。
根据陀螺仪工作原理的不同,可将陀螺仪分为机械式陀螺仪﹑振动式陀螺仪﹑光学陀螺仪等
1)机械式陀螺仪括挠性陀螺仪,液浮陀螺仪﹑气浮陀螺仪等;
2)振动陀螺仪:包括酒杯式振动陀螺仪,谐振陀螺仪﹑硅陀螺仪﹑振动弦陀螺仪,音叉陀螺仪等;
3)光学陀螺仪:包括激光陀螺仪﹑光纤陀螺仪等。
1.机械式陀螺仪
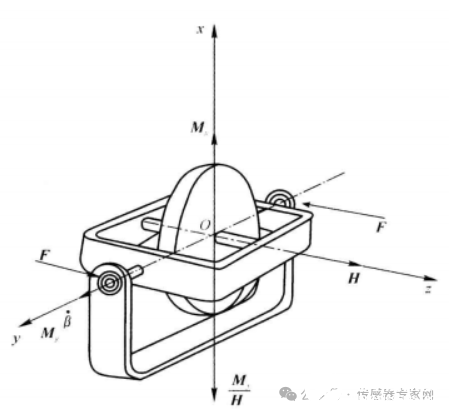
机械式陀螺仪是一种利用高速旋转的质量来敏感其自旋轴在惯性空间定向变化的装置。机械式陀螺仪具有两大特性:定轴性与进动性。
定轴性就是当陀螺仪不受外力矩作用时,陀螺仪自转轴相对于惯性空间保持方向不变;
进动性就是当陀螺仪受到外力矩作用时,陀螺仪自转轴将沿最短路径趋向于外力矩矢量,进动角速率正比于外力矩。
2.激光陀螺仪
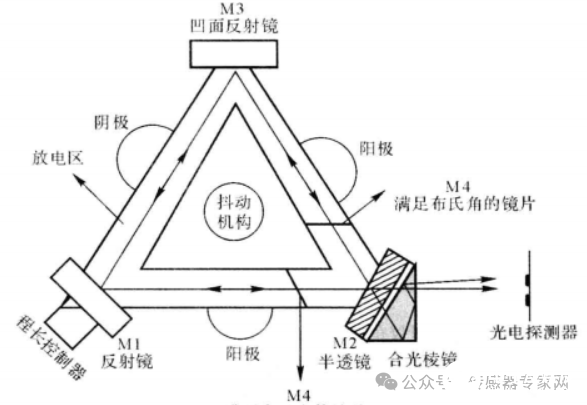
光学陀螺仪的工作原理主要是基于Sagnac效应。所谓Sagnac效应是指在任意几何形状的闭合光路中,从某一观察点出发的一对光波沿相反方向运行一周后又回到该观察点时,这对光波的光程将由于该闭合光路相对于惯性空间的旋转而不同,光程差的大小与闭合光路的转动速率成正比。利用Sagnac效应,通过测量反向传输的两束光之间的物理差别来测量角度或角速率。
激光陀螺仪是以感测谐振腔环形光路中正、反两路光的光程差来获得被测角速率的敏感器。在实际的应用中,激光陀螺仪的谐振腔通常由三面或四面高质量的反射镜构成。
与传统机电陀螺仪相比,激光陀螺仪具有以下优点:
1)结构简单,一般只由十几个零件组成。
2)可靠性高,寿命长。激光陀螺仪由于没有运动部件和磨损件,为全固态仪表,因而坚固可靠,抗加速度性能好。
3)启动时间短。
4)无交叉耦合效应。激光陀螺仪的敏感轴垂直于环形腔平面,对其他正交轴方向的转动角速率﹑角加速度及线加速度不敏感,没有常规机电陀螺仪的交叉耦合效应误差。
5)易于和计算机接口。激光陀螺仪的输出信号是脉冲形式,对脉冲进行计数就得到对应转动角度的数字量,便于计算机处理,不需要高精度的A/D电路。
6)功耗低,体积小,质量轻。
7)角速率测量的动态范围宽,可达到士1500°/s。
8)性能稳定,它的腔体由高稳定性的材料制成,保证了标度因数的极高稳定性。
3.光纤陀螺仪
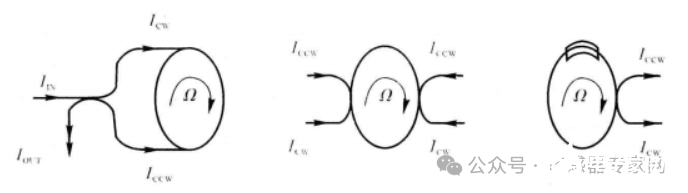
光纤陀螺仪采用多匝光纤线圈代替环形激光器,通过多次循环可增强Sagnac效应。即在同一闭合光路中从同一光源发出两束特征相同的光,沿相反方向进行传播,汇合到同一探测点,产生干涉;若存在绕垂直于闭合光路所在平面的轴线相对惯性空间转动的角速率,则沿正、反方向传播的光束产生光程差,该值与角速率成正比;通过光程差与相应的相位差的关系,可通过检测相位差来计算角速率。光纤陀螺仪一般由光纤传感线圈,集成光学芯片、宽带光源和光电探测器组成。
与激光陀螺仪相比,光纤陀螺仪不需要光学镜的高精度加工,易于制造。
按光纤陀螺仪的工作原理,可以将光纤陀螺仪分为干涉式光纤陀螺仪(I-FOG)、谐振式光纤陀螺仪(R-FOG)和布里渊型光纤陀螺仪(B-FOG)。I-FOG是第一代光纤陀螺仪,技术上已经成熟;R-FOG是第二代光纤陀螺仪;B-FOG是第三代光纤陀螺仪。其基本原理相同,但是各自所采用的相位解调方式不同,即对光纤陀螺仪的噪声补偿方法不同而已。
加速度计
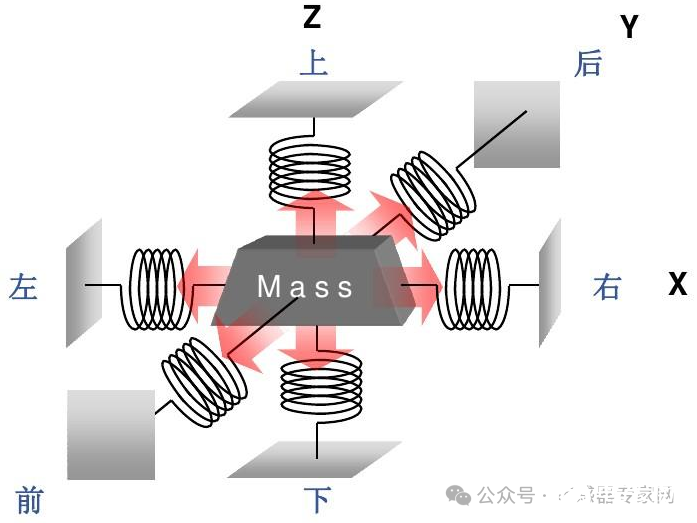
加速度计用来测量载体的平移运动加速度,通过对加速度的积分,可求得载体运动的速度和位置。加速度计是依据牛顿力学定律而工作的,它通过测量检测质量所受的惯性力来间接测量载体的加速度。通常,加速度计包含一个经由弹簧约束的在仪表壳体内的检测质量块,通过检测质量块的位移变化来测量运载体的加速度。加速度计是惯性导航和惯性制导的基本测量元件之一,其性能和精度直接影响导航和制导系统的精度。
有很多不同的惯性敏感器可以用于检测加速度的大小。这些敏感器有不同的类型和设计形式。根据检测加速度的器件的构造形式可以分为机械式的和固态的。常用的机械式加速度计有石英挠性摆式加速度计,两轴力反馈加速度计等。固态加速度计如硅加速度计、光纤加速度计等。目前,机械式加速度计已经非常成熟,精度和分辨率较高,检测范围也很宽。
下面简单介绍目前常用的石英挠性加速度计的结构、工作原理等。
石英挠性加速度计
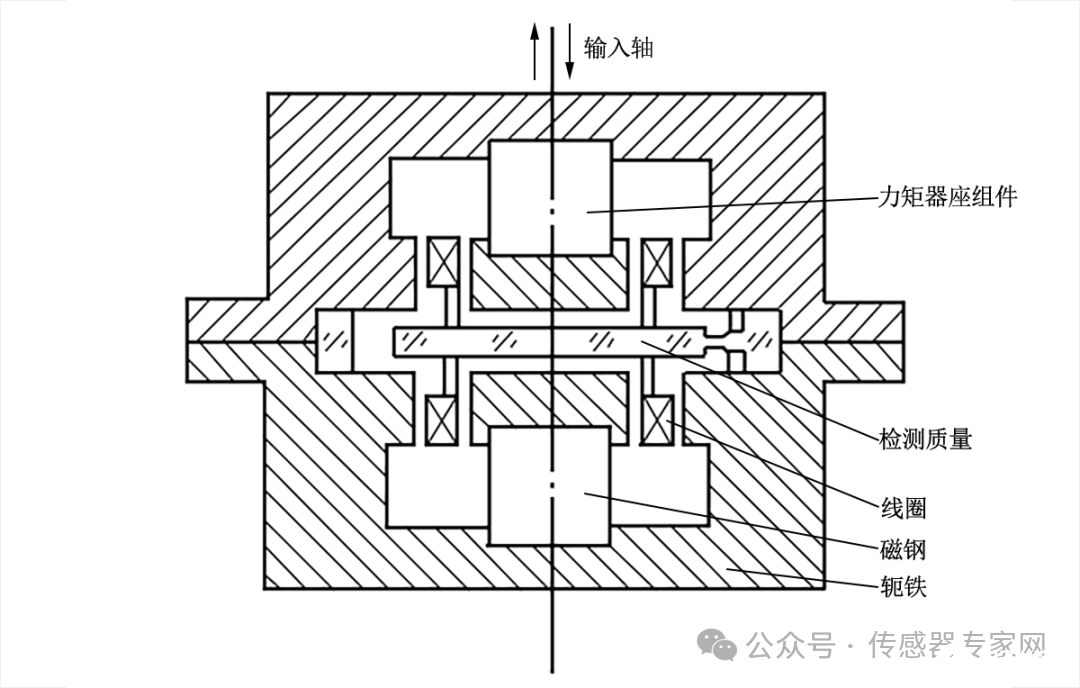
石英挠性加速度计主要由上下力矩器、摆组件以及伺服回路组成。其中石英玻璃经化学方法加工形成挠性摆片,线圈与石英摆片固连,连同线圈骨架与摆片构成摆组件,实现检测质量的功能,用以敏感外界输入加速度。
力矩器由轭铁、磁钢、磁极片与补偿环组成,其中磁钢选用合适的永磁材料构成永磁体以建立磁场,轭铁与磁极片使磁场沿轭铁形成磁回路,补偿环对漏磁进行补偿,上下力矩器在结构上强行磁极对顶并固定,互为对方的反向磁极,在间隙间形成均匀磁场。
当外界有加速度输入时,摆组件受惯性力作用将离开平衡位置。此时由摆组件上下表面与上下力矩器端面组成的差动电容容值将发生改变,这一电信号通过接线柱输出至伺服回路。经过放大的电流信号输出至线圈,产生与输入加速度力矩相平衡的反馈力矩,使摆组件回到平衡位置。在摆组件偏转角度很小的情况下,该电流近似与输入加速度呈线性关系。此时检测该电流就能得到输入加速度大小。
审核编辑 黄宇
-
传感器
+关注
关注
2550文章
51035浏览量
753049 -
测量
+关注
关注
10文章
4849浏览量
111237
发布评论请先 登录
相关推荐
气压传感器的分类与应用
典型的超声波传感器及其应用领域
激光传感器的分类及应用领域
滤波器的基本原理、分类及实现方式
光电效应传感器的基本原理、分类及特点
位移传感器:原理、分类、应用与未来趋势
3D霍尔效应位置传感器的基本原理及其应用案例






 工商网监
工商网监
评论