 佐治亚理工开发通用机器人外骨骼控制技术
佐治亚理工开发通用机器人外骨骼控制技术
正在初创阶段的美国乔治亚理工学院研制出了一套有效且广泛适用的机器人外骨骼控制方案。这套方案能够自适应适应对用户,无需经过特殊培训或者精准调校。只需为复杂算法作出细微的调整,用户仅需穿上这款外骨骼装备便能直接进行户外行走。这项研究成果于 3 月 20 日正式刊登在《科学·机器人》杂志。
这个全新设计的系统主要依靠深度学习来快速,准确且灵活地保护人类。如今已经证实,这种外骨骼装备能够流畅地适应各种室外行走、站立以及攀爬楼梯或斜坡等操作能力。
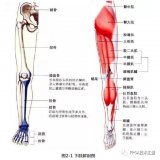
相较于以往,大多数研究都专注于单个活动项目,如平坦道路行走或楼梯攀爬,所采用的算法通常专攻于环境识别及探索。而乔治亚理工学院的新发现则是将注意力转向人体本身,以监控身体每一个关节和肌肉的运动情况为主。
经过一系列测试后,新研发的髋部外骨骼套装比未装设设备时显著降低了使用者的体力损耗,也使得他们的关节负担减轻了许多。
研究团队运用现有的算法进行全面的训练,训练过程依赖于从实验室录制的各类动作数据。实验中,所有参与者都身穿动力髋部外骨骼套装,在测力板上以不同速度走动,爬完可调式楼阶,走过有高低起伏的坡道,并在这些动作不断变化。实验团队如同拍摄电影时使用的动态捕捉技术一样,详细记录下每一个动作,从而了解到每一个动作中各部分的表现及其功能。
研究人员表示,深信机器人外骨骼在将来会对于军事作战士兵,空中行李搬运工以及其他高强度体力劳动者等群体产生深远的影响。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28379浏览量
206904 -
深度学习
+关注
关注
73文章
5500浏览量
121107
发布评论请先 登录
相关推荐
步行助力外骨骼机器人
中它能够替代医疗人员进行反复的康复工作,并能够提供精准的关节运动姿态和保护。 国内下肢外骨骼系统的发展尚处于研究试验阶段,其技术难点在于外骨骼对于人体运动的顺应性即外骨骼
地瓜机器人发布一系列通用机器人套件
在“机器人+”浪潮的推动下,地瓜机器人近日隆重推出了一系列面向未来的软硬件产品组合,旨在赋能新一代通用机器人的发展。此次发布的亮点包括旭日5智能计算芯片、RDK X5机器人
「知识讲堂」外骨骼康复机器人医疗器械分类、标准、注册指导原则
作为智慧康养创新引领者,迈步机器人深耕康复医疗器械领域多年,近期陆续有粉丝私信或留言,说自己刚涉足医疗器械不久,对外骨骼康复机器人比较感兴趣,希望有更深度的了解。对此,小迈通宵达旦收集、整理了一份

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
软通动力与智元新创在通用机器人领域将展开合作
在上海携手签署了一项具有里程碑意义的战略合作协议,标志着双方在通用机器人产品创新、场景示范等关键领域将展开深度合作,共同探索人形机器人技术的新边界,致力于将这一前沿科技成果推向千行万业,赋能社会各领域的智能化升级。
银河通用机器人完成7亿元天使轮融资
北京银河通用机器人有限公司在成立短短一年时间内,便成功完成了高达7亿人民币的天使轮融资,这标志着该公司在机器人技术领域取得了显著的成就,并获得了市场和投资方的广泛认可。
逐际动力携手英伟达Isaac平台, 助力通用机器人研发
在近日举行的年度计算机视觉与模式识别会议(CVPR)上,英伟达发布了其最新版本的NVIDIA Isaac Sim。与此同时,逐际动力也宣布将采用这一升级版的Isaac平台,以强化学习和提升通用机器人的泛化能力为核心目标,推动机器人技术
北卡罗来纳州立大学突破:模拟框架加速外骨骼机器人控制系统开发
在科技日新月异的今天,生物医学工程领域迎来了一项重大突破。最新一期《自然》杂志上发表的研究成果,为我们揭示了一个由北卡罗来纳州立大学苏浩团队开发的全新模拟框架,这一框架有望加速外骨骼机器人控制
北卡罗来纳州立大学:加速外骨骼机器人控制系统的研发
在科技日新月异的今天,生物医学工程领域的进步尤为引人注目。近日,国际知名学术期刊《自然》杂志发表了一项重要研究成果,报道了北卡罗来纳州立大学苏浩团队在生物医学工程领域的一项重大突破——他们成功开发了一种模拟框架,这一框架有望极大加速外骨骼
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展
观众展示了用于人形机器人学习的通用基础模型 Project GR00T(代表通用机器人 00 技术)。Project GR00T 利用 NVIDIA Isaac

通用机器人初创公司逐际动力完成新一轮战略融资
近日,通用机器人领域的初创公司逐际动力宣布完成新一轮战略融资,此次融资由杭州灏月企业管理有限公司参与。逐际动力自2022年成立以来,一直致力于具身智能与通用机器人的研发与制造,展现出了强大的创新能力和市场潜力。
人形机器人成为车圈“新宠”?
现在的人形机器人不仅形态更接近人类,而且具备更多的智慧。随着大型AI模型的不断推进,人工智能正在加速人形通用机器人的量产和落地。
发表于 02-22 09:22
•389次阅读

「喜报」迈步机器人荣获机器人应用典型案例奖
日前,在中国科学院深圳先进技术研究院的指导下,由深圳市机器人协会、《机器人与智能系统》杂志组织的第八届深圳机器人年度评选揭晓榜单。迈步机器人

「外骨骼机器人」颠覆康复行业格局,重塑千亿康复市场!
提到康复,你会想到什么?是汗如雨下进行康复训练的患者,还是哼哧哼哧卖力扛大腿的康复治疗师?何不花几分钟时间看完本文,一起走进这康复行业新世界!一、外骨骼机器人带来的康复变革据《柳叶刀》数据显示,我国





 工商网监
工商网监
评论