 实时操作系统之RT-Thread及FreeRTOS
实时操作系统之RT-Thread及FreeRTOS
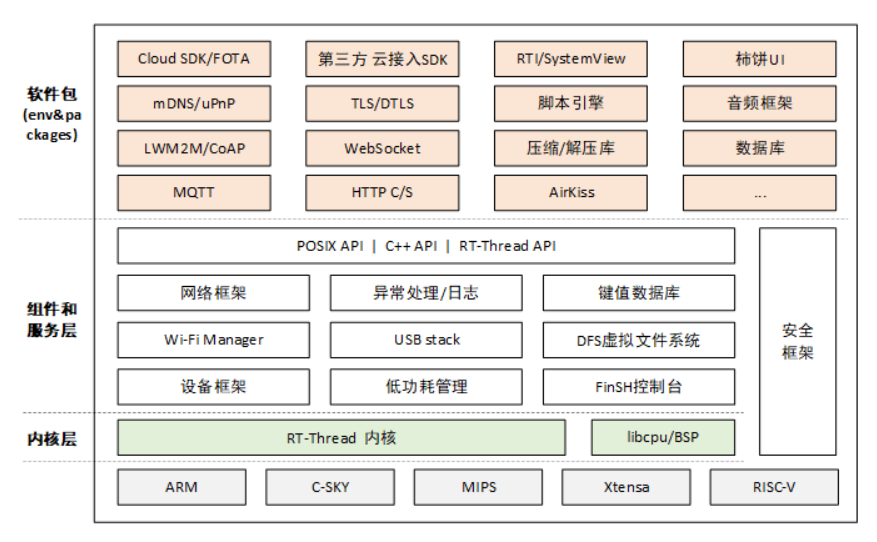
RT-Thread 与其他很多 RTOS 如 FreeRTOS的主要区别之一是,它不仅仅是一个实时内核,还具备丰富的中间层组件,如下图所示。
FreeRTOS和RT-Thread是两种常见的嵌入式实时操作系统(RTOS),它们在设计理念、内核架构、生态系统和应用领域等方面有一些区别:
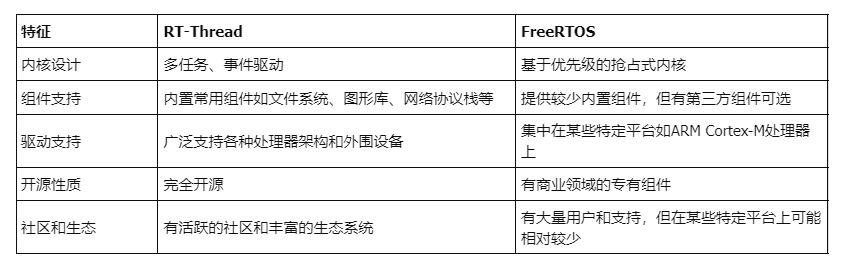
内核设计:
FreeRTOS的内核是基于优先级的抢占式内核,任务的执行顺序由任务的优先级确定,并且可以被更高优先级的任务抢占。
RT-Thread的内核是多任务、事件驱动的,任务可以通过事件、消息等方式进行通信和同步,可以更加灵活地处理多任务场景。
组件和驱动支持:
RT-Thread内置了丰富的组件和驱动支持,如文件系统、网络协议栈、图形库等,而且对不同处理器架构和外围设备的支持更广泛。
FreeRTOS提供的组件较少,但可以通过第三方组件进行扩展。在驱动支持方面,主要集中在某些特定平台如ARM Cortex-M处理器上。
开源性质:
RT-Thread是完全开源的,用户可以自由地查看、修改和分发源代码。
FreeRTOS也是开源的,但在商业领域中也有一些专有的组件,需要购买商业许可才能使用。
社区和生态系统:
RT-Thread有一个活跃的社区和丰富的生态系统,用户可以在社区中获取技术支持、交流经验,并且有大量的开源项目可供参考和使用。
FreeRTOS也有大量的用户和支持,但在某些特定平台上可能相对较少。
总的来说,FreeRTOS更适合简单的实时系统应用,对资源要求较低,而RT-Thread则更适合于复杂的多任务场景,具有更多的组件和驱动支持,以及更加灵活的事件驱动机制。选择哪个取决于项目需求、硬件平台和开发人员的偏好。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表德赢Vwin官网
网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
内核
+关注
关注
3文章
1372浏览量
40273 -
操作系统
+关注
关注
37文章
6801浏览量
123280 -
FreeRTOS
+关注
关注
12文章
484浏览量
62131 -
RT-Thread
+关注
关注
31文章
1285浏览量
40075
发布评论请先 登录
相关推荐
实时操作系统FreeRTOS移植教程
Free 即免费的,RTOS 全称是 Real Time Operating System,中文就是实时操作系统。注意,RTOS 不是指某一个确定的系统,而是指一类系统。比如 uC/O
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(上)
RT-Thread 是国人自主研发的开源实时操作系统(RTOS),RT-Thread Nano 是极简版的硬实时内核,内存占用小,移植简单。
RT-Thread (嵌入式实时操作系统)简介
优越之处。RT-Thread 是一款完全由国内团队开发维护的嵌入式实时操作系统(RTOS),具有完全的自主知识产权。经过近 12 个年头的沉淀,伴随着物联网的兴起,它正演变成一个功能强大、组件丰富的物
发表于 05-14 09:56
RT-Thread嵌入式实时操作系统的相关资料分享
最近在公司实习,在导师的指导下,在学习RT-Thread,之前接触过一点Freertos,也是实时操作系统。裸机系统main函数里面顺序执行
发表于 11-09 07:43
RT-Thread嵌入式实时多线程操作系统介绍
1RT-Thread介绍RT-Thread全称是Realtime-Thread,顾名思义,它是一个嵌入式实时多线程操作系统。它是一款完全由国
发表于 02-17 07:13
基于RT-Thread操作系统衍生rt-smart实时操作系统简介
1、rt-smart 实时操作系统简介RT-Thread Smart(简称 rt-smart)嵌入式实时
发表于 06-22 17:56
RT-Thread编程指南
RT-Thread编程指南——RT-Thread开发组(2015-03-31)。RT-Thread做为国内有较大影响力的开源实时操作系统,本
发表于 11-26 16:06
•0次下载
RT-Thread用户手册
RT-Thread用户手册——本书是RT-Thread的编程手册,用于指导在RT-Thread实时操作系统环境下如何进行编
程。
发表于 11-26 16:16
•0次下载
RT Thread操作系统教程及资料
## RT-Thread 简介 ##
RT-Thread RTOS是一款来自中国的开源实时操作系统,
由国内一些专业开发人员开发、维护。
它不仅仅是一款高效、稳定的
发表于 05-11 14:54
•2次下载
RT-Thread嵌入式实时操作系统详解
最近在公司实习,在导师的指导下,在学习RT-Thread,之前接触过一点Freertos,也是实时操作系统。裸机系统main函数里面顺序执行
发表于 11-04 09:06
•21次下载

国民技术携手RT-Thread共同推进MCU与RT-Thread操作系统广泛适配
日前,国民技术股份有限公司与知名物联网操作系统厂商睿赛德科技(RT-Thread)签署会员合作协议,正式成为RT-Thread高级会员。国民技术将基于通用MCU和RT-Thread物联
RT-Thread实时操作系统安装向导
RT-Thread 是一个集实时操作系统(RTOS)内核、中间件组件和开发者社区于一体的技术平台,由熊谱翔先生带领并集合开源社区力量开发而成,RT-Thread 也是一个组件完整丰富、
发表于 04-02 09:43
•7次下载
RT-Thread操作系统的FreeRTOS兼容层
的兼容项目中。 1 概述 这是一个针对RT-Thread国产操作系统的FreeRTOS操作系统兼容层,可以让原有基于FreeRTOS
新书发布——《实时操作系统应用技术:RT-Thread与ARM编程实践》
RT-Thread又一本新书《实时操作系统应用技术——基于RT-Thread与ARM的编程实践》发布,标志着RT-Thread生态和

新书发布——《RT-Thread嵌入式实时操作系统内核、驱动和应用开发技术》
我们非常高兴地宣布,由郑苗秀、沈鸿飞和廖建尚编著的《RT-Thread嵌入式实时操作系统内核、驱动和应用开发技术》一书正式发布。本书的编写团队由多位在嵌入式和实时





 工商网监
工商网监
评论