 不同地物分类方法在长江中下游典型湖区应用对比分析
不同地物分类方法在长江中下游典型湖区应用对比分析
一、引言
长江中下游湖区作为重要的资源和生态环境保护区域,其地物分类情况对区域资源管理和生态可持续发展具有重要影响。通过对湖区地物进行有效地分类,可以帮助掌握湖区地物类型特征以及分布情况,为湖区资源管理利用与生态保护提供依据。不同地物分类方法提取地物有各自优缺点,会因为采取分类方法的不同影响区域地物提取的精度效果。因此,在长江中下游湖区有必要进行地物分类方法对比研究来为湖区地物分类方法选择提供借鉴。
龙感湖国家级自然保护区、华阳河湖群省级自然保护区是长江中下游淡水湖泊中保持完好且具有典型代表性的两处湖泊湿地保护区,孕育了丰富多样的植物和野生动物资源,是我国重要水鸟越冬地和候鸟迁徙中转站,对长江中下游经济和生态发展发挥着重要作用。以该区域作为研究区,以高分一号WFV作为数据源,采用人工神经网络、随机森林、支持向量机、最大似然、最小距离、马氏距离6种不同地物分类方法进行地物分类,从空间和精度方面对试验结果进行对比分析,探讨地物分类效果,以选择出适用于研究区地物特征提取的有效分类方法。
二、研究区概况
龙感湖国家级自然保护区是目前保持最为完好的重要淡水湖泊湿地之一,湖区跨湖北省黄梅县和安徽省宿松县,属于亚热带湿润季风气候区,总面积为223.22km2。华阳河湖群省级自然保护区是以保护湿地生态系统和珍稀水禽为主的自然保护区,位于安徽省宿松县境内,与龙感湖国家级自然保护区相接,属于北亚热带湿润气候,总面积为504.97km2。
三、数据来源与研究方法
3.1数据来源
所采用数据为2022年11月7日GF1-WFV影像,云覆盖量为0,空间分辨率为16m,时间分辨率为4d,成像幅宽为800km,光谱范围0.45~0.89μm。卫星遥感传感器易受大气、运行高度、运行速度等因素的影响导致影像数据出现信息偏差情况。为纠正影像数据误差,提高分类处理效果,需对影像进行预处理。常用的ENVI软件能够快速地对影像进行预处理操作:首先通过对加载后的GF1-WFV影像进行线性拉伸提升显示效果;然后对影像依次进行辐射定标、大气校正、正射校正,其中辐射定标根据辐射定标参数在软件中完成,大气校正运用FLAASH模型完成;最后利用影像自带的RPC信息和地面高程数据进行正射校正。
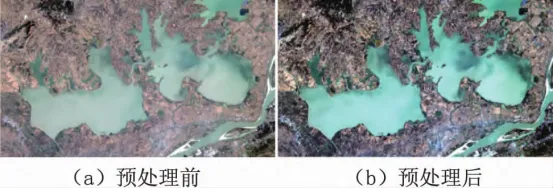
图1预处理前后的对比影像
3.2研究方法
3.2.1分类体系及样本选取
根据研究区地物实际特征,参照《土地利用现状分类》(GB/T21010—2017)将地物类型分为耕地、植被、建设用地、河湖、坑塘5类。参照高清影像,采用目视解译的方法对确定的地物类型进行训练样本选取,并对选择出的地物训练样本进行可分离性计算。表1为可分离性数值计算结果,各地类间样本可分离性数值均大于1.8,样本可分离性较高,符合要求。
表1地类样本可分离性数值

3.2.2分类方法
采用人工神经网络、随机森林、支持向量机、最大似然、最小距离、马氏距离6种分类方法进行比较分析。
1)人工神经网络:提出于20世纪40年代,随着研究的深入,20世纪70年代算法逐渐运用于高分辨率遥感影像地物分类中,
通过各个神经元间的相互作用寻找优化解、改变隐藏层节点处理影像数据,使其对于地表复杂度较高、地物纹理特征多样的区域具有较好的分类效果。
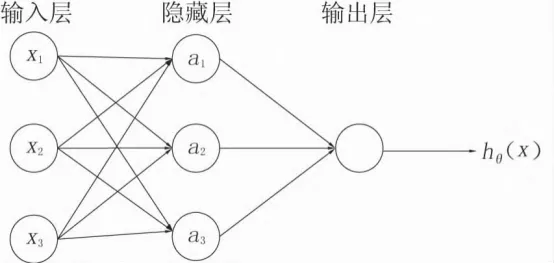
图2人工神经网络算法示意图
2)随机森林:是一种组合多种决策树于一体的集成化分类器。随机森林算法利用bootstrap采样技术从原训练样本中有放回的随机抽取K个样本,每个抽取的样本容量需与原始训练样本容量一致,并对抽取的K个样本建立起K个决策树模型,随机森林从K个决策树得出的分类结果中选出最佳分类器进行分类。
3)支持向量机分类:通过分离面将不同地物训练样本分开,使得不同的分类样本置于分类面两侧,寻找最优分离面即最靠近不同地物训练样本且不同样本之间距离最大的面。距离最优分离面最近的训练样本被称为支持向量。
4)最大似然分类:是指根据影像波段特征,将每类地物分类函数假设为正态函数,计算需要分类影像像元所属某一类别训练样本的似然度,最后归类到似然度最大一类的方法。
5)最小距离分类:通过计算每类地物的均值以及协方差,将均值定义为每类地物空间中心点,计算各类地物中心点与分类影像像元间的距离,将与地类中心点距离最近的像元归为该类,从而对各地物进行归类。最小距离D计算公式为

式中Xj为像元灰度值,Mij为第i类j波段均值,Sij为第i类j波段均值标准差。
6)马氏距离:类似于欧式距离用来度量距离的指标,能够考虑数据间的相互关系并根据计算出的各类别到分类影像的马氏距离将待分类图像归到临近类别,计算公式为

式中X为像元数据,∑为多变量协方差矩阵,μk为样本均值。
3.2.3分类后处理
主要分析模块能够很好地处理破碎小斑块,通过剔除过分细小的斑块,将临近的小斑块聚合,使得图像更加平滑,提高分类效果。
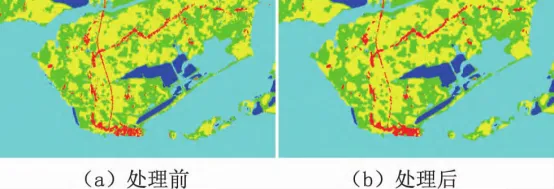
图3研究区部分区域小斑块处理前后对比影像
3.2.4精度评价
为了评价不同地物分类方法下的精度效果,在研究区范围内随机创建2000个检验样本点(图4),结合高清影像目视解译随机点所代表的各类地物真实分布情况,将检验样本点结果与对应的样本分类结果相对应,计算其混淆矩阵。由于用户精度和生产者精度能够反映出各地物类型的分类精度,总体精度和kappa系数能够反映出地物分类结果的整体精度,因此针对各类方法下地物分类结果采用用户精度(UA)、生产者精度(PA)、总体精度(OA)、kappa系数评定分类精度,计算公式分别为
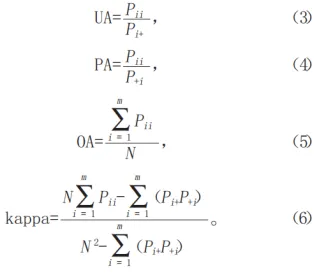
式中Pii为混淆矩阵第i行第i列的样本数,Pi+为混淆矩阵第i行样本总数,P+i为第i列的样本总数,N为样本总数,m为土地覆盖类型数量。
图4研究区检验样本点分布图
四、结果与分析
4.1地物分类结果
通过采用人工神经网络、随机森林、支持向量机、最大似然、最小距离、马氏距离6种分类方法对研究区地物类型进行结果对比,分类结果如图5所示。从整体结果看,植被主要分布在研究区北部,少量零星分布于南部建设用地、耕地区域;耕地主要分布于湖泊区下方,研究区南部、西部和东部,少量分布于北部林地间隙;建设用地主要分布于南部耕地区,其他细碎分布在山林区域;河湖区域集中在研究区中部以及湖泊支流上,坑塘主要分布在湖泊边缘处。
4.2精度对比
在建立混淆矩阵基础上通过计算用户精度(UA)、生产者精度(PA)、总体精度(OA)以及kappa系数进行精度评价,检验地物分类结果的准确性。6种不同地物分类方法得到的分类结果精度见表2-表4。
表2不同分类方法用户精度
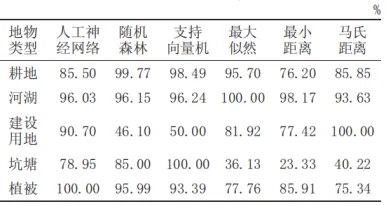
从表2可以看出人工神经网络法的整体用户精度相对较好,各地物类型的用户精度均大于75%。随机森林、支持向量机分类法中,除建设用地其余4类地物用户精度均大于85%,能达到较高的精度。最小距离、马氏距离、最大似然分类法的整体用户精度相对较差,其中最小距离整体用户精度最差,坑塘用户精度仅为23.33%。
表3不同分类方法生产者精度
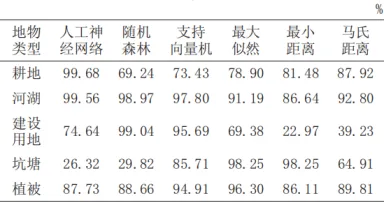
从表3可以看出支持向量机分类法各地类生产者精度均大于70%,最大似然分类法各地类生产者精度均大于60%。相比于以上两种方法,人工神经网络和随机森林分类法坑塘生产者精度较差均小于30%,除坑塘外其他4类地物生产者精度较好。最小距离、马氏距离分类法的建设用地生产者精度较差,最小距离仅为22.97%。
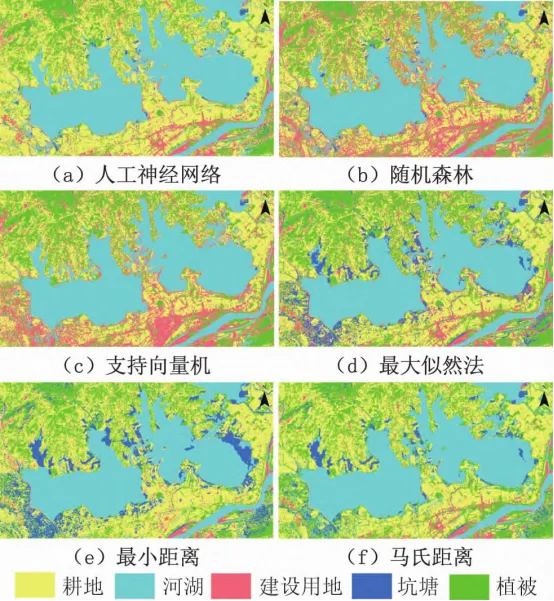
图5各类算法分类结果图
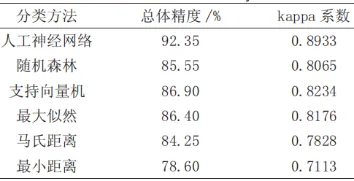
从表4可以看出,kappa系数相对较好,总体精度达95%以上,kappa系数大于85%,其次为支持向量机、最大似然、随机森林法,马氏距离和最小距离分类法总体精度和kappa系数相对较差,总体精度均小于85%,kappa系数均小于0.80。
表4分类精度统计
通过整体精度结果综合比较发现在不同的分类方法作用下研究区地物提取总体精度、kappa系数存在着较大差异,各类地物用户精度和生产者精度也存在着较大差别。为了更好地探讨6种分类方法分类效果,还需对分类空间结果进一步分析。
4.3空间对比
为对比不同分类方法下5种地物空间分布结果,选择研究区局部典型区域进行比较,结果如图6和图7所示。通过最小距离分类法和马氏距离分类法得出的空间分布结果相对较差,虽然能分辨出5类地物大致特征,但是部分河湖与坑塘区域不能区分开,且靠近耕地区域的部分零碎建设用地识别效果差,只识别出少量的建设用地,其他地类间也存在少量误分现象。最大似然法虽然分辨出了耕地临近区域的建设用地,但是同样存在着部分河湖区被纳入坑塘区域的问题。相对于以上3种方法随机森林分类法和支持向量机的河湖和坑塘识别情况有所改善,且分辨出较多未被识别出的建设用地,但存在局部耕地区域识别为建设用地的现象。相对于以上几种分类法,人工神经网络法能够较好地识别不易区分的河湖与坑塘、耕地与建设用地,减少了错分漏分的情况,更贴近地类的真实分布。
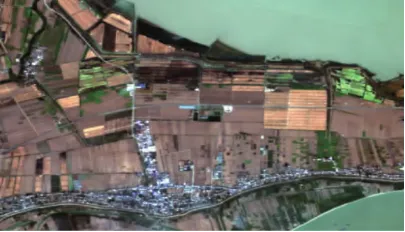
图6局部区域遥感影像
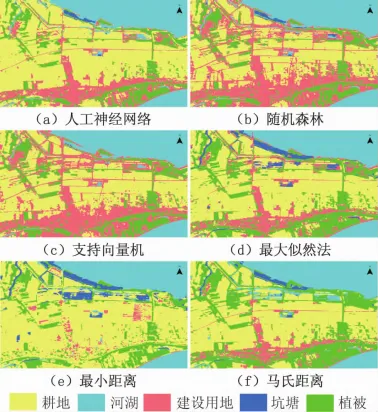
图7各分类方法局部分类结果图
五、结论
从分类精度结果看,支持向量机和最大似然分类结果分别存在建设用地、坑塘地类用户精度较低的情况,随机森林分类结果存在建设用地的用户精度和坑塘的生产者精度较差的情况,马氏距离和最小距离的用户精度和生产者整体精度效果较差。相比而言,人工神经网络分类法整体分类精度相对较好,总体精度达92.35%,
kappa系数达0.8933。从地物空间分类结果看,人工神经网络优于马氏距离和最小距离、随机森林、支持向量机、最大似然分类法分类结果,得出的地物空间分类效果较贴近实际地物分布情况,地物错分漏分情况较少,能够较好地识别出河湖、坑塘、耕地、建设用地、植被,更适用于研究区地物特征信息的提取,可为类似区域河湖湿地管理以及生态保护方面的探究提供参考。
推荐:
便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。
审核编辑 黄宇
-
遥感
+关注
关注
0文章
245浏览量
16816 -
成像系统
+关注
关注
2文章
195浏览量
13923 -
高光谱
+关注
关注
0文章
330浏览量
9934
发布评论请先 登录
相关推荐
RoCE与IB对比分析(二):功能应用篇
常用音频线接口对比分析
对比分析点焊机与传统焊接方法
网关和路由器的对比分析
基于高光谱数据的典型地物分类识别方法研究

交流伺服电机与直流伺服电机的对比分析
地物光谱仪在土壤中油脂分析中的应用

地物光谱仪在环境植物分析中的应用
超级电容储能与飞轮储能的对比分析
机器人焊接与人工焊接对比分析

基于云-端高精度地图的油菜无人播种作业系统设计与试验
DC电源模块与AC电源模块的对比分析






 工商网监
工商网监
评论