 can的通信协议主要由什么完成
can的通信协议主要由什么完成
CAN(Controller Area Network)是一种基于消息的通信协议,主要用于汽车和工业领域。它是一种局域网技术,允许多个设备在同一网络上进行通信。CAN协议的主要特点包括高可靠性、实时性、灵活性和成本效益。本文将详细介绍CAN通信协议的各个方面,包括其历史、原理、特点、应用和发展趋势。
一、CAN通信协议的历史
1.1 CAN的起源
CAN协议最早由德国Bosch公司在1983年提出,目的是为了解决汽车电子系统中的通信问题。当时,汽车电子系统中的各个控制单元需要进行数据交换,但是传统的通信方式无法满足实时性和可靠性的要求。因此,Bosch公司提出了CAN协议,以满足汽车电子系统的需求。
1.2 CAN的发展
自1983年以来,CAN协议得到了广泛的应用和发展。1987年,CAN协议被国际标准化组织(ISO)采纳为国际标准ISO 11898。此后,CAN协议逐渐成为汽车和工业领域的首选通信协议。1991年,CAN协议被引入到汽车行业,成为汽车电子系统的标准通信协议。如今,CAN协议已经被广泛应用于汽车、工业、医疗、航空等领域。
二、CAN通信协议的原理
2.1 CAN的基本组成
CAN通信协议主要由以下几个部分组成:
2.2 CAN的通信方式
CAN协议采用广播通信方式,即一个节点发送的数据可以被网络上的所有节点接收。这种通信方式具有以下特点:
- 简化了网络结构:由于采用广播通信方式,网络中的节点不需要进行复杂的路由选择。
- 提高了通信效率:由于所有节点都可以接收到发送的数据,因此可以减少数据的传输次数。
- 增强了系统的可靠性:由于数据可以被多个节点接收,因此即使某个节点出现故障,也不会影响到整个系统的通信。
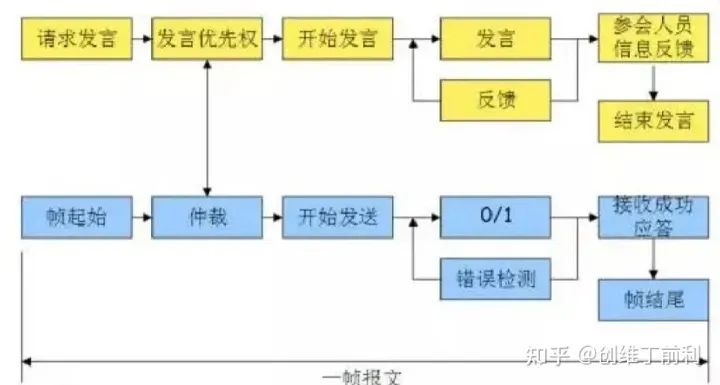
2.3 CAN的数据传输
CAN协议的数据传输采用非破坏性仲裁机制。当两个或多个节点同时发送数据时,优先级较低的节点会自动停止发送,等待优先级较高的节点发送完毕。这种机制可以保证数据传输的实时性和可靠性。
2.4 CAN的错误检测
CAN协议具有强大的错误检测能力,包括:
- 位错误检测:检测单个比特的错误。
- 帧错误检测:检测整个数据帧的错误。
- 应答错误检测:检测接收节点是否正确接收到数据。
- 溢出错误检测:检测数据缓冲区是否溢出。
三、CAN通信协议的特点
3.1 高可靠性
CAN协议采用了多种错误检测机制,可以有效地检测和处理数据传输过程中的错误。此外,CAN协议还具有自愈功能,即使某个节点出现故障,也不会影响到整个系统的通信。
3.2 实时性
CAN协议采用非破坏性仲裁机制,可以保证数据传输的实时性。当多个节点同时发送数据时,优先级较高的节点可以优先传输数据,从而确保关键数据的实时传输。
3.3 灵活性
CAN协议支持多种网络拓扑结构,包括总线型、星型和混合型。此外,CAN协议还支持多种通信速率,可以根据实际需求进行调整。
3.4 成本效益
CAN协议的硬件和软件成本相对较低,因此在汽车和工业领域得到了广泛的应用。
四、CAN通信协议的应用
4.1 汽车领域
CAN协议在汽车领域的应用非常广泛,包括发动机控制、制动系统、安全系统等。通过CAN协议,汽车中的各个控制单元可以实现高效的数据交换,提高汽车的性能和安全性。
4.2 工业领域
CAN协议在工业领域的应用也非常广泛,包括生产线监控、机器人控制等。通过CAN协议,工业设备可以实现实时的数据交换,提高生产效率和安全性。
4.3 医疗领域
CAN协议在医疗领域的应用主要体现在医疗设备的数据交换和监控。通过CAN协议,医疗设备可以实现实时的数据传输,提高诊断和治疗的准确性。
4.4 航空领域
CAN协议在航空领域的应用主要体现在飞机的控制系统和监控系统。通过CAN协议,飞机的各个系统可以实现高效的数据交换,提高飞行的安全性和可靠性。
五、CAN通信协议的发展趋势
5.1 高速CAN
随着技术的发展,高速CAN(HS-CAN)逐渐成为主流。HS-CAN具有更高的通信速率,可以满足更高要求的实时性和可靠性。
5.2 车载以太网
随着汽车电子系统的复杂性不断增加,车载以太网逐渐成为汽车通信的主流技术。车载以太网具有更高的带宽和更低的延迟,可以满足汽车电子系统的需求。
-
通信协议
+关注
关注
28文章
879浏览量
40294 -
CAN
+关注
关注
57文章
2744浏览量
463603 -
电子系统
+关注
关注
0文章
410浏览量
31145 -
局域网
+关注
关注
5文章
751浏览量
46277
发布评论请先 登录
相关推荐
CAN总线通信协议的基础知识

STM32 CAN通信协议
CAN串行通信协议
CAN通信协议简析
CAN总线通信协议分析实现

CAN总线通信协议是什么
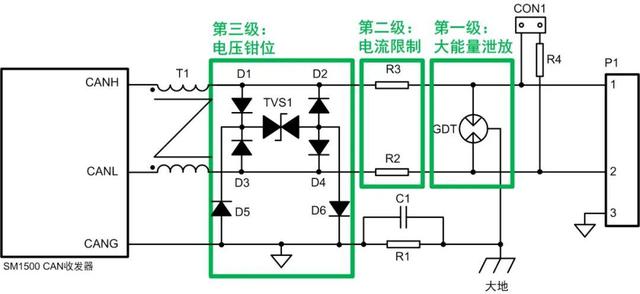
can总线的通信协议有哪些 CAN接口保护及工作原理





 工商网监
工商网监
评论