 PLC在机械手控制系统中的具体应用
PLC在机械手控制系统中的具体应用
一、引言
随着工业自动化技术的飞速发展,机械手作为现代制造业中不可或缺的重要设备,其智能化、自动化水平不断提高。在机械手控制系统中,PLC(可编程逻辑控制器)因其可靠性高、编程简单、功能强大等优点,被广泛应用于机械手的控制中。本文将详细介绍PLC在机械手中的应用,包括PLC的基本原理、在机械手控制系统中的具体应用以及PLC在机械手控制中的优势。
二、PLC的基本原理
PLC是一种可编程的数字电子控制器,具有灵活性、可靠性、可扩展性、可编程性等特点。PLC的核心是CPU(中央处理器),其功能主要包括信号采集、信号处理、运算、控制输出等。PLC将实现控制的程序经过编程装载到内部存储器中,通过读写操作,将输入信号经过处理和比较后产生输出信号,实现对机械手的控制。
三、PLC在机械手控制系统中的具体应用
控制机械手的运动
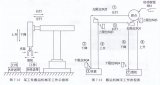
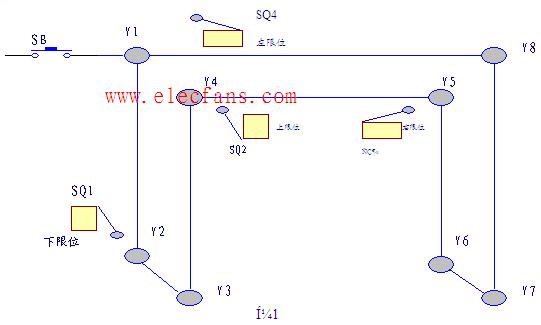
机械手的运动包括关节运动和连杆运动,这些运动是由电机驱动的。PLC可以根据机械手的设计规格,编写相应的运动控制程序,实时监测机械手各个关节的运动位置、速度和加速度等参数,并在需要的时候改变机械手的运动速度和位置,从而控制机械手的运动轨迹和抓取动作。例如,在装配作业中,PLC可以控制机械手按照预设的轨迹和速度,将零部件准确地装配到指定位置。
检测机械手与工件的距离和力度
机械手与工件之间的物理接触是实现抓取、移动和放置的重要环节。因此,PLC在机械手控制系统中的另一个应用是检测机械手与工件之间的距离和力度。PLC可以通过搭载各种传感器来实现对机械手与工件之间的距离感知和力度监测,这些传感器包括接近开关、压力传感器、负载传感器、激光测距仪等。通过这些传感器,PLC可以实时监测机械手与工件之间的距离和力度,从而确保机械手在抓取和放置过程中不会对工件造成损坏。
控制机械手的柔顺性和定位精度
机械手的工作环境往往比较复杂,需要具有一定的柔顺性和定位精度。PLC可以通过编写自适应控制算法,在机械手的运动过程中实现柔顺性和定位精度的控制。例如,在抓取易碎物品时,PLC可以通过控制机械手的夹持力度和速度,确保物品在抓取过程中不会受损;在精确定位方面,PLC可以实时检测机械手的位置信息,通过算法计算得到准确的定位信息,并将其发送到机械手的控制系统,从而实现对机械手的高精度定位。
采集和处理数据
机械手的控制系统中,常常需要采集和处理大量的电气信号和工艺数据,以便进行控制和优化。PLC具有强大的数据采集和处理能力,能够实时采集、传输各种类型的数据信息。通过对这些数据的处理和分析,PLC可以实现对机械手工作状态的实时监控和预测,从而及时发现并解决问题,提高机械手的运行效率和稳定性。
四、PLC在机械手控制中的优势
可靠性高
PLC采用模块化设计,具有较强的抗干扰能力和容错能力。同时,PLC内部具有自诊断功能,可以及时发现并修复故障,从而保证了机械手控制系统的稳定运行。
编程简单
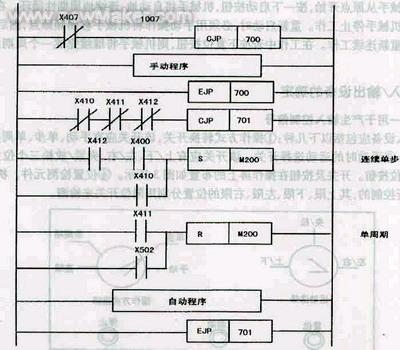
PLC采用面向用户的指令集和编程语言,编程方式直观易懂,易于学习和掌握。同时,PLC支持多种编程语言,如梯形图、指令表、功能块图等,可以根据不同的应用需求选择合适的编程语言。
通用性强
PLC可以适用于各种不同类型的机械手控制系统,具有较强的通用性和可扩展性。同时,PLC可以与各种传感器、执行机构等外部设备进行连接和通信,实现信息的共享和交换。
维护方便
PLC的模块化设计使得其维护更加方便快捷。当某个模块出现故障时,可以单独更换该模块而不需要更换整个系统,从而降低了维护成本和时间。
五、结论
综上所述,PLC在机械手控制系统中具有广泛的应用和显著的优势。随着工业自动化技术的不断发展,PLC在机械手控制中的应用将越来越广泛,为机械手控制系统的发展提供更加可靠、高效、智能的解决方案。
- 控制系统
+关注
关注
41文章
6358浏览量
109936 - plc
+关注
关注
4999文章
12853浏览量
458432 - 机械手
+关注
关注
7文章
327浏览量
29477
发布评论请先登录
相关推荐
基于S7-200SMART的机械手PLC控制系统的设计案例
注塑机机械手控制系统设计要点
基于 CAN 总线的机械手控制系统The Control S
计算机-PLC在机械手远程控制系统中的应用
基于PLC控制的注塑机专用机械手

基于PLC的机械手混合驱动控制







 工商网监
工商网监
评论