 工业控制中常用的pid控制器是什么
工业控制中常用的pid控制器是什么
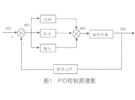
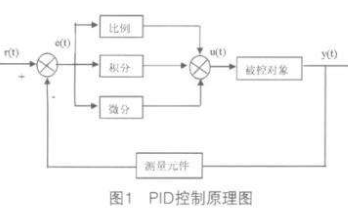
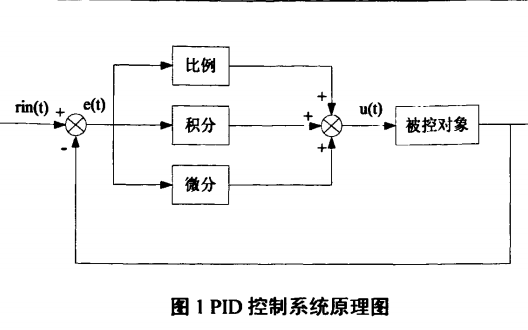
PID控制器是一种广泛应用于工业控制领域的控制器,其全称为比例-积分-微分控制器(Proportional-Integral-Derivative Controller)。它是一种线性控制器,通过比例(P)、积分(I)和微分(D)三个参数的调节,实现对系统输出的精确控制。
一、PID控制器的基本原理
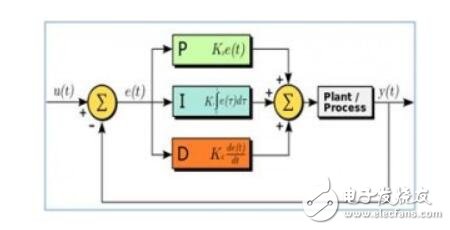
- 比例控制(P控制)
比例控制是PID控制器中最基本的控制方式。其核心思想是通过比较系统的输出值与期望值之间的偏差,然后根据偏差的大小来调整控制量。比例控制的公式为:
u(t) = Kp * e(t)
其中,u(t)表示控制量,Kp表示比例系数,e(t)表示偏差。
比例控制的优点是响应速度快,但缺点是存在稳态误差,即当系统达到稳态时,输出值与期望值之间仍然存在一定的偏差。
- 积分控制(I控制)
积分控制是为了消除比例控制中的稳态误差而引入的。其核心思想是将偏差随时间的累积值进行积分,然后根据积分值来调整控制量。积分控制的公式为:
u(t) = u(t-1) + Ki * ∫e(t)dt
其中,Ki表示积分系数,∫e(t)dt表示偏差的积分值。
积分控制的优点是可以消除稳态误差,但缺点是可能引起系统的过冲和振荡。
- 微分控制(D控制)
微分控制是为了提高系统的稳定性和响应速度而引入的。其核心思想是预测偏差的变化趋势,然后根据变化趋势来调整控制量。微分控制的公式为:
u(t) = u(t-1) + Kd * de(t)/dt
其中,Kd表示微分系数,de(t)/dt表示偏差的变化率。
微分控制的优点是可以提高系统的稳定性和响应速度,但缺点是对噪声敏感,可能导致控制量的波动。
二、PID控制器的设计方法
- 确定控制目标
在设计PID控制器之前,首先需要明确控制目标,即希望系统输出达到什么样的状态。控制目标可以是稳态误差、超调量、上升时间等。
- 建立数学模型
根据实际系统的工作原理,建立数学模型。数学模型可以是线性的,也可以是非线性的。对于线性系统,可以使用传递函数、状态空间等方法进行建模;对于非线性系统,可以使用神经网络、模糊控制等方法进行建模。
- 确定PID参数
根据控制目标和数学模型,确定PID控制器的比例系数Kp、积分系数Ki和微分系数Kd。常用的参数整定方法有:
(1)经验法:根据经验,选择合适的比例系数、积分系数和微分系数。
(2)试凑法:通过不断调整PID参数,观察系统响应,直至达到满意的控制效果。
(3)优化法:使用优化算法(如遗传算法、粒子群算法等)对PID参数进行优化,以获得最佳的控制效果。
- 仿真验证
在确定了PID参数后,需要进行仿真验证。仿真验证可以使用MATLAB、Simulink等软件进行。通过仿真验证,可以检查PID控制器的性能是否满足控制目标。
- 实际应用
在仿真验证通过后,将PID控制器应用到实际系统中。在实际应用过程中,可能需要对PID参数进行微调,以适应实际工况的变化。
三、PID控制器的应用领域
PID控制器因其简单、实用、易于实现等特点,在工业控制领域得到了广泛的应用。常见的应用领域包括:
- 温度控制:如锅炉、空调、化学反应器等。
- 流量控制:如水泵、压缩机、管道输送等。
- 压力控制:如液压系统、气动系统等。
- 速度控制:如电机、输送带等。
- 位置控制:如机器人、起重机等。
- 化学反应过程控制:如化学反应器、发酵罐等。
四、PID控制器的优缺点
- 优点
(1)结构简单:PID控制器由比例、积分、微分三个部分组成,结构简单,易于理解和实现。
(2)参数易于调整:PID控制器的参数(Kp、Ki、Kd)可以根据控制目标进行调整,具有较好的灵活性。
(3)适用范围广:PID控制器适用于各种线性和非线性系统,具有较好的普适性。
(4)实现成本低:PID控制器的实现成本较低,可以应用于各种工业控制系统。
- 缺点
(1)对噪声敏感:微分控制对噪声敏感,可能导致控制量的波动。
(2)参数整定困难:对于复杂的系统,PID参数的整定可能比较困难,需要进行多次试验和调整。
(3)无法处理非线性系统:对于非线性系统,PID控制器的性能无法处理非线性系统。
-
控制器
+关注
关注
112文章
16332浏览量
177795 -
非线性
+关注
关注
1文章
212浏览量
23078 -
工业控制
+关注
关注
37文章
1451浏览量
85827 -
PID控制器
+关注
关注
2文章
173浏览量
18579
发布评论请先 登录
相关推荐
PID控制器的控制规律


PID控制的理论和PID控制器设计的及PID控制器参数整定的以及分析





 工商网监
工商网监
评论