 Segwa平衡车DIY ,教你玩转都市交通工具
Segwa平衡车DIY ,教你玩转都市交通工具
“赛格威”(英语:Segway)是一种电力驱动、具有自我平衡能力的个人用运输载具,是都市用交通工具的一种“赛格威”是一种让人留下深刻印象的代步工具,它占地不足一平方米,乘车人像使用滑板一样站立其上,双手解放,但却可以仅通过身体移动改变重心位置,就进行前进后退,转弯刹车等操作。传统的交通工具都无法做到随心而动,必须把大部分精力放在控制方向和速度上,而“赛格威”并不需要专门的操控装置,一切由车身自主完成,也由此获得了“平衡车”的别名。赛格威”平衡车看来神奇,但你有没有发现它的原理其实很简单呢?拜最新科技所赐,关键零件都可以在淘宝上直接买到,而控制程序也可以查阅原理自行编写。拥有自己的平衡车,其实非常简单。
倒立摆和机器人
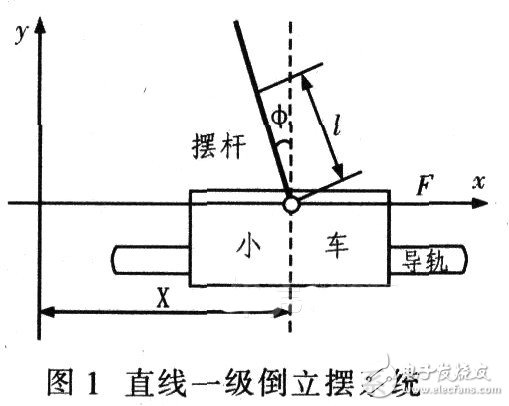
“赛格威”的平衡问题,实际上是一个多级倒立摆问题。当一个人用手托住一根竹竿的底部使它在空中竖直不倒下,这就是一个一级倒立摆系统的模型。如果第一根竹竿上面用铰链连着其他竹竿,或者竹竿本身具有一定的弹性(可比拟“赛格威”上的有骨骼和关节的大活人),就成了多级倒立摆。
用手撑竹竿的游戏很多人都玩过,印象最深的应当是它是一个静不稳定系统。在桌面上的水杯能自己站稳,当重心投影落于杯底内时,即使有细小扰动也不会倒下。但是手心里的竹竿大部分时间重心投影不在接触点上,让竹竿保持相对不动靠的是动态调整——竹竿往哪边倒,手就赶紧往哪边凑,让重心回到接触点周围。这就是依靠人眼,大脑和人手完成的动态平衡过程。
人类的大脑在处理这类问题上有先天优势,因为人的走路过程本质上来说是不断前跌的过程,必须依靠实时伸出支撑脚转移重心来保证直立行进的动态平衡。而让机器人做到这一点就很困难,需要综合解决动态控制过程中的线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等诸多细节——所以至今见到的人形机器人里,能僵硬走路的很多,但能和真人一样上蹿下跳的绝无仅有。
两名民警驾驶“赛格威”单人警用巡逻车巡逻
“赛格威”的动态平衡原理和倒立摆相同,将最上方的乘客作为摆臂,然后控制车轮维持系统重心使乘客直立。当驾驶人改变自己身体的角度往前或往后倾时,“赛格威”就会根据倾斜的方向前进或后退,而速度则与驾驶人身体倾斜的程度呈正比以保持平衡。这里的一个巧妙设计是将乘客传感和控制二合一了 ——“赛格威”前进或后退维持平衡的同时,也达成了按乘客意图前进或后退的目的。最终,熟练的驾驶人可以和自己行走一样,仅凭直觉就能完成前后左右各方向的运动,同时解放双手和大脑思维,这一特点使“赛格威”特别适合游览和警用巡逻。
机械部分
此次设计的机械机构包括一个简单的独立悬挂。缓冲部分直接采用自行车的避震器(需要更换弹簧),机体做得不很紧凑,主要为了能够拆卸折叠,便于收放和运输。(需要说明的是,结构已提交专利申请,请勿用于商业用途。)整机材料很简单,两个独立驱动的轮子+电机驱动板+车身角度传感器+转弯传感器+电池+一个装下这些东西的盒子 。两个轮子、电机、避震器都是来自淘宝的成品。钣金和机加件为单独加工。
这里贴一些制作图片,详细的零件工程图列在最后。
整机外形
DIY自己的“赛格威”
和人类行走一样,“赛格威”的控制也需要传感器和致动 器。它依靠MEMS技术制造的精密固态陀螺仪和加速度计感应车体的旋转,速度和倾斜,高速微处理器计算传感器数据,并驱动轮毂电机完成前进/后退/差速转 弯的动作。而在电路之外,为了让它从实验室中的倒立摆变成实用的代步车,还需要准备一些必需的结构零件和附件。
结构细节
电机安装部分
电机为优耐特电机,250W,24v/质量不好,不作推荐。
装配过程
锂电池仓
原设计为铅酸电池,后一朋友为我无偿提供了锂电池,在此再次表示感谢。
整体安装
电路部分
主控采用AVR的ATMEGA_32,电机驱动为H桥驱动方式,元件选用的IR2184和IRF1405。传感器选用IDG300和ADXL335,电流传感器为ACS755。另外还有一些外围的小功能,可有可无,不详述了。
控制驱动PCB图
传感器PCB图
PCB空板
焊接需要注意的就是——别太马虎就行。先焊低矮的元器件,再焊大个的!
焊接基本完成
连接电机测试
车身角度获取
选用的传感器为模拟量输出,因此只需要用单片机的AD采集数据后计算出角度值即可,需要注意的是,采集后 的数据直接使用效果会很糟糕。需要再次进行滤波计算,得到一个准确、及时、抗扰动的真实角度数据。调速过程中可以用串口将数据输出,辅助调试。这里就是简 单的PID控制车轮转速,如果不记得就百度看看。调试参数会花点时间,刚开始参数别调过大,否则抖动起来有危险!另外需要设置角度过大停机的功能。转向数 据为采集转向电位器而来,采集后的数据进行滤波处理后再用。转向中间设置一个无效的死区,也是防止误动作。
散热器:
遥控和语音模块
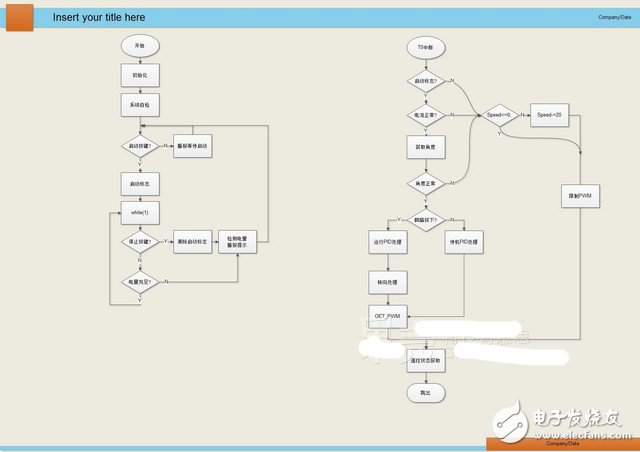
控制程序部分
果壳网友们的素质都很高,这里就提一些关键部分。一些个人认为有用的代码附在最后。
流程图
遥控
硬件原先选用18b20,很是遗憾这部分程序没调通,可能原因1:系统必须有多处中断,并且中断服务程序比较多,因而打乱了18b20的时序,加上没有示波器,因而没调通。可能原因2:智商问题。尝试调试了近2小时无果后改用模拟量温度芯片LM35D,电压直接由电阻分压而来。其余部分可自由发挥。
友情提示:此车有一定危险性,不排除摔倒、失控等问题,在空地上玩玩就好,打算用来代步上班的,请给自己买好保险!
-
电机驱动
+关注
关注
60文章
1215浏览量
86721 -
智能硬件
+关注
关注
205文章
2345浏览量
107522 -
电动平衡车
+关注
关注
1文章
18浏览量
10063
发布评论请先 登录
相关推荐
双轮平衡车(B酷DIY)
超炫酷的未来交通工具,让你看傻眼
超炫酷的未来交通工具,你看傻眼没?
平衡车出世到禁止上路,既然都是因为他们...............
教你DIY一辆自己的赛格威平衡车
从李亚鹏送王菲的电动平衡车看陀螺仪应用
【直播课件】【平衡车】电机芯课堂:玩转平衡车控制方案
【直播课件】【平衡车】电机芯课堂:玩转平衡车控制方案
玩转OpenHarmony PID:教你打造两轮平衡车
平衡车到底是交通工具还是玩具?
奥迪披露汽车和无人机的新型概念交通工具
饭仔DIY --《平衡车之硬件制作》






 工商网监
工商网监
评论